Вам также может понравиться
- Rmaeround 1 FinalpptДокумент19 страницRmaeround 1 FinalpptTanmay WalkeОценок пока нет
- Physics ProjectДокумент17 страницPhysics ProjectKarthika UmashankarОценок пока нет
- Relay Switch Circuit - HTML PDFДокумент15 страницRelay Switch Circuit - HTML PDFaisxos@gmail.comОценок пока нет
- BC547Документ3 страницыBC547Rohit VermaОценок пока нет
- Quebral, Darlene Joy Bsit 1-D (Transistor Assignment)Документ1 страницаQuebral, Darlene Joy Bsit 1-D (Transistor Assignment)DARLENE JOY QUEBRALОценок пока нет
- The Transistor Amplifier..Документ74 страницыThe Transistor Amplifier..Abian DavilaОценок пока нет
- TransisorsДокумент6 страницTransisorsZavdielОценок пока нет
- Resistor: You Use The Resistor To Control The Voltages and The Currents in Your CircuitДокумент13 страницResistor: You Use The Resistor To Control The Voltages and The Currents in Your CircuitKalayaan EscoteroОценок пока нет
- YALUNG - AARON JOHN - IndustrialElecsLab #2Документ11 страницYALUNG - AARON JOHN - IndustrialElecsLab #2Yamburger LoveОценок пока нет
- Introduction to Electronic Components and DevicesДокумент24 страницыIntroduction to Electronic Components and DevicesVincent AveryОценок пока нет
- All About NPN and PNP TransistorsДокумент2 страницыAll About NPN and PNP TransistorsMuhammad JavedОценок пока нет
- Final PPT Rmae 2 No Changes NowДокумент15 страницFinal PPT Rmae 2 No Changes NowPrasad BelureОценок пока нет
- DJM2032 Lecture 2Документ24 страницыDJM2032 Lecture 2zackkaizerОценок пока нет
- Components 1. Diode: Semiconductor DiodesДокумент8 страницComponents 1. Diode: Semiconductor DiodesVaranasi RamakrishnaОценок пока нет
- AE Unit - 1Документ12 страницAE Unit - 1aamirnasirОценок пока нет
- Water Level IndicatorДокумент7 страницWater Level IndicatorAnuj DubeyОценок пока нет
- AEC Module1 Clipping and ClampingДокумент43 страницыAEC Module1 Clipping and ClampingVinay kumar havinalОценок пока нет
- Q: Draw A Full Wave Bridge Rectifier and Explain Its Working PrincipleДокумент12 страницQ: Draw A Full Wave Bridge Rectifier and Explain Its Working PrincipleAmir RahmanОценок пока нет
- Led CircuitsДокумент18 страницLed CircuitsDedan Kimathi100% (1)
- Lessons in Electric Circuit2Документ84 страницыLessons in Electric Circuit2jun deeОценок пока нет
- Chapter 3 & 4 Special - Purpose - Diodes and BJTsДокумент50 страницChapter 3 & 4 Special - Purpose - Diodes and BJTsAbdul RehmanОценок пока нет
- Transistors: Essential Electronic ComponentsДокумент2 страницыTransistors: Essential Electronic ComponentsNipun chamikaОценок пока нет
- Chapter 7 - Electronic ComponentsДокумент24 страницыChapter 7 - Electronic Componentsruben_robin50% (2)
- Wireless Live Wire Detection CircuitДокумент11 страницWireless Live Wire Detection Circuits chethanОценок пока нет
- Metal DetectorДокумент6 страницMetal DetectorKasthuri.V kasthuri.VОценок пока нет
- Chapter 2Документ25 страницChapter 2Bizuayehu Ze GeorgeОценок пока нет
- Difference Between An NPN and A PNP TransistorДокумент24 страницыDifference Between An NPN and A PNP TransistorLeePeiyingОценок пока нет
- Lectour of AppliedДокумент57 страницLectour of AppliedEsayas AfewerkiОценок пока нет
- Presentation 2Документ9 страницPresentation 2Sentinel PlaysОценок пока нет
- High-Voltage DC GeneratorДокумент5 страницHigh-Voltage DC Generatorpolkin_pokaОценок пока нет
- Edc Special DevicesДокумент50 страницEdc Special DevicesSurekha PittaОценок пока нет
- TransistorsДокумент4 страницыTransistorsapi-3713690Оценок пока нет
- Q: Draw A Full Wave Bridge Rectifier and Explain Its Working PrincipleДокумент13 страницQ: Draw A Full Wave Bridge Rectifier and Explain Its Working PrincipleAmir RahmanОценок пока нет
- MINI PROJECT REPORTSound Operated Switch Using 555 Timer ICДокумент30 страницMINI PROJECT REPORTSound Operated Switch Using 555 Timer ICSagar Bhardwaj80% (35)
- Electronic Devices and Circuits 2 Mark Questions - Solved Unit 1Документ60 страницElectronic Devices and Circuits 2 Mark Questions - Solved Unit 1priya88_recОценок пока нет
- Robotics Module Switches and Relays GuideДокумент15 страницRobotics Module Switches and Relays GuidewhibleysОценок пока нет
- Department of Mechatronic Engineering: Power DiodeДокумент12 страницDepartment of Mechatronic Engineering: Power DiodeEng King'e FredrickОценок пока нет
- Semiconductor Devices and Circuits: DiodesДокумент64 страницыSemiconductor Devices and Circuits: DiodesRiddhi GuptaОценок пока нет
- HV GeneratorДокумент6 страницHV GeneratorNatasaBugaianОценок пока нет
- Electronics: - Electronics Is A Branch of ScienceДокумент43 страницыElectronics: - Electronics Is A Branch of SciencemozammilОценок пока нет
- ELECTRONOTES.comДокумент8 страницELECTRONOTES.comJairus TanОценок пока нет
- Transistor BasicsДокумент2 страницыTransistor BasicsVasu ReddyОценок пока нет
- Physics ProjectДокумент4 страницыPhysics ProjectAmrita RajeshОценок пока нет
- Auto Water Pump Switcher DocumentationДокумент22 страницыAuto Water Pump Switcher DocumentationRakesh Kaligineedi90% (20)
- Sjeee 6Документ6 страницSjeee 6maxmanishОценок пока нет
- Difference Between NPN and PNP Transistor - ElprocusДокумент5 страницDifference Between NPN and PNP Transistor - ElprocustusarОценок пока нет
- What is a Diode and How Does it WorkДокумент24 страницыWhat is a Diode and How Does it WorkJake Vann ClydeОценок пока нет
- CH 3 ElectronicsДокумент37 страницCH 3 Electronicsbeila.amu.22Оценок пока нет
- Summary of Bipolar Transistors:: N P N N P NДокумент7 страницSummary of Bipolar Transistors:: N P N N P NKAUNDINYAОценок пока нет
- Basic Electronics UNIT1Документ74 страницыBasic Electronics UNIT1AnoushkaОценок пока нет
- Transistor basics and testingДокумент6 страницTransistor basics and testingAchik SniperОценок пока нет
- Edc-I Module 2 PPTSДокумент56 страницEdc-I Module 2 PPTSvanpalshirsat27Оценок пока нет
- Climpper Clamper and Transistor ExperimentДокумент7 страницClimpper Clamper and Transistor ExperimentBryan SmithОценок пока нет
- Forward V-I Characteristics of P-N Junction DiodeДокумент7 страницForward V-I Characteristics of P-N Junction DiodeTwinkle johnsonОценок пока нет
- Diode CharacteristicsДокумент23 страницыDiode CharacteristicsCarryl BaerОценок пока нет
- Capacitor, Reed Relay & Reed SwitchДокумент5 страницCapacitor, Reed Relay & Reed SwitchCt HajarОценок пока нет
- Power Electronics Devices...Документ21 страницаPower Electronics Devices...Brian omondiОценок пока нет
- EDC 2 Marks All Five UnitsДокумент31 страницаEDC 2 Marks All Five Unitsksreddy2002Оценок пока нет
- Dissertation1 PDFДокумент131 страницаDissertation1 PDFmilos ajdacicОценок пока нет
- Green Light Catalog 2Документ24 страницыGreen Light Catalog 2milos ajdacicОценок пока нет
- Brac-1995 01043 PDFДокумент386 страницBrac-1995 01043 PDFmilos ajdacicОценок пока нет
- AMD Ryzen Processor and AMD Ryzen Master Overclocking Users GuideДокумент45 страницAMD Ryzen Processor and AMD Ryzen Master Overclocking Users GuideThura Htet Aung100% (1)
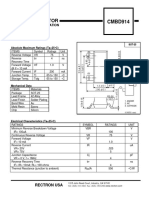
- CMBD914 208730 PDFДокумент3 страницыCMBD914 208730 PDFmilos ajdacicОценок пока нет
- A 1Документ4 страницыA 1milos ajdacicОценок пока нет
- AMD APP SDK GettingStartedGuideДокумент16 страницAMD APP SDK GettingStartedGuideAjversonОценок пока нет
- CMBD914 208730 PDFДокумент3 страницыCMBD914 208730 PDFmilos ajdacicОценок пока нет
- Arduino Notes 2 PDFДокумент36 страницArduino Notes 2 PDFmilos ajdacicОценок пока нет
- DIA5ED2130303EN (Web)Документ42 страницыDIA5ED2130303EN (Web)milos ajdacicОценок пока нет
- Oc Module 1-6 PDFДокумент162 страницыOc Module 1-6 PDFTintu TrmОценок пока нет
- Electronics Symbol and DescriptionДокумент3 страницыElectronics Symbol and DescriptionShiela SalvillaОценок пока нет
- NCERT Exemplar For Class 12 Chemistry Chapter 1Документ36 страницNCERT Exemplar For Class 12 Chemistry Chapter 1gudiОценок пока нет
- Scheme of Examination: Engineering Mathematics - IIДокумент34 страницыScheme of Examination: Engineering Mathematics - IIvamsiОценок пока нет
- PR Elektronika DasarДокумент7 страницPR Elektronika DasarRAHMATUL AFIVAОценок пока нет
- Synthesis and Characterization of Tin Oxide: A ReviewДокумент4 страницыSynthesis and Characterization of Tin Oxide: A ReviewkannanОценок пока нет
- 12025Документ18 страниц12025Zachary HuffmanОценок пока нет
- EE305Документ28 страницEE305api-3853441Оценок пока нет
- Defects in SolidsДокумент34 страницыDefects in SolidsPrabhakara MusturОценок пока нет
- 1 Elex PreboardДокумент9 страниц1 Elex PreboardV1NSKYОценок пока нет
- Everyday Electronics: A Guide to Active and Passive ComponentsДокумент26 страницEveryday Electronics: A Guide to Active and Passive ComponentsMelvin Cabonegro0% (1)
- BlakemoreДокумент10 страницBlakemoreArman Modoudi YaghoutiОценок пока нет
- Physics Investigatory CBSEДокумент15 страницPhysics Investigatory CBSERam Mukilan50% (4)
- Solid State ChemistryДокумент61 страницаSolid State ChemistrydhananjaylandgeОценок пока нет
- Semiconductor Theory & Diodes (Modules 1 & 2Документ47 страницSemiconductor Theory & Diodes (Modules 1 & 2Chariza MaicoОценок пока нет
- Basic ECEДокумент2 страницыBasic ECEmarkvillaplazaОценок пока нет
- Darlington Connection.: I U I U I U U I U HДокумент14 страницDarlington Connection.: I U I U I U U I U Hzedge85Оценок пока нет
- Physics of Power Dissipation in CMOSДокумент24 страницыPhysics of Power Dissipation in CMOSMahendra Babu100% (1)
- Basic Electronics: Preparatory Electricity and Electronics Training SystemДокумент32 страницыBasic Electronics: Preparatory Electricity and Electronics Training SystemMi LuanaОценок пока нет
- Contentpage Tafssp 157 17Документ77 страницContentpage Tafssp 157 17prabs20069178Оценок пока нет
- LPCVD Polysilicon Passivating Contacts For Crystalline Silicon Solar CellsДокумент10 страницLPCVD Polysilicon Passivating Contacts For Crystalline Silicon Solar CellsBerkay UYGUNОценок пока нет
- Chapter 7 Dopant Diffusion - IДокумент32 страницыChapter 7 Dopant Diffusion - I강준호Оценок пока нет
- DiodesДокумент87 страницDiodesazas asdОценок пока нет
- ENGG1310 Microelectronics GuideДокумент66 страницENGG1310 Microelectronics Guide丁周辰Оценок пока нет
- 2: Transistors, Fabrication, LayoutДокумент44 страницы2: Transistors, Fabrication, LayoutSangameshwer EnterprisesОценок пока нет
- HVAC Symbols GuideДокумент14 страницHVAC Symbols GuideamrmohОценок пока нет
- Solar Panel - Maryory EspañaДокумент5 страницSolar Panel - Maryory EspañaMARYORI ESPAÑA GIRONZAОценок пока нет
- Student Lab 1 Intro Semiconductor LabvoltДокумент5 страницStudent Lab 1 Intro Semiconductor LabvoltbishoyОценок пока нет
- Solid State Sri Chaitanya Ipe Material Second YearДокумент6 страницSolid State Sri Chaitanya Ipe Material Second YearMukkavilli SubrahmanyamОценок пока нет
- MJC 2010 H2 Physics Prelim Solutions To Paper 1 and 2xДокумент23 страницыMJC 2010 H2 Physics Prelim Solutions To Paper 1 and 2xcjcsucksОценок пока нет