Вам также может понравиться
- "Assignment (3) ": Prof. Dr. Mohamed A. Moustafa HassanДокумент13 страниц"Assignment (3) ": Prof. Dr. Mohamed A. Moustafa HassanBassam SamyОценок пока нет
- Adobe Scan Aug 17, 2022Документ12 страницAdobe Scan Aug 17, 2022Monika AnjuОценок пока нет
- The Code For Solving Above Example of Space Frame Is Given ByДокумент5 страницThe Code For Solving Above Example of Space Frame Is Given Bykhem thapaОценок пока нет
- E082c1f638f8e81e 0000000000000000 VsДокумент30 страницE082c1f638f8e81e 0000000000000000 VstbrunolastОценок пока нет
- Lab 1Документ13 страницLab 1miller.austin0529Оценок пока нет
- Correction TD 3Документ4 страницыCorrection TD 3Nour zОценок пока нет
- Image Transformation To Mimic The Vision of A CatДокумент4 страницыImage Transformation To Mimic The Vision of A CatEysha qureshiОценок пока нет
- All Programs Part A 15EE76 2018Документ15 страницAll Programs Part A 15EE76 2018Harshit RajputОценок пока нет
- The Code For Solving Above Example of Plane Frame Is Given ByДокумент3 страницыThe Code For Solving Above Example of Plane Frame Is Given Bykhem thapaОценок пока нет
- Assignment 1: Semiconductor DevicesДокумент3 страницыAssignment 1: Semiconductor Devicesmj819Оценок пока нет
- Experiment No: 1: FunctionДокумент11 страницExperiment No: 1: FunctionSonaliОценок пока нет
- Tugas Minggu 3 MK Mekanika TeknikДокумент3 страницыTugas Minggu 3 MK Mekanika TeknikJodi rizki rahmanОценок пока нет
- Programs Codes For AnkithaДокумент10 страницPrograms Codes For AnkithaSravan KumarОценок пока нет
- Module 4 Programming - Matlab: 1 Written ExercisesДокумент4 страницыModule 4 Programming - Matlab: 1 Written ExerciseswandersonОценок пока нет
- DSP Lab 4Документ9 страницDSP Lab 4Sahar MumtazОценок пока нет
- 19MT10004 Assignment 2A AbhishekДокумент4 страницы19MT10004 Assignment 2A AbhishekAbhishek RoyОценок пока нет
- Notes On Hypergeometric Functions: 1 Definitions and NotationsДокумент4 страницыNotes On Hypergeometric Functions: 1 Definitions and Notationsanjali5151Оценок пока нет
- Reconocimiento de Patrones Domingo Mery Capítulo 2Документ18 страницReconocimiento de Patrones Domingo Mery Capítulo 2Dejaay Jheff Auccasi GallardoОценок пока нет
- N.C Lab Assignment#01 FA17-CVE-077: Basic FunctionДокумент2 страницыN.C Lab Assignment#01 FA17-CVE-077: Basic FunctionnaveedОценок пока нет
- Df832bc2e6d22e45 0000000000000000 VsДокумент30 страницDf832bc2e6d22e45 0000000000000000 VstbrunolastОценок пока нет
- 10 2Документ11 страниц10 2tami aОценок пока нет
- 3fae14064195391b 0000000000000000 VsДокумент31 страница3fae14064195391b 0000000000000000 VstbrunolastОценок пока нет
- Solucion de AreasДокумент3 страницыSolucion de AreasYonel RomeroОценок пока нет
- Winda Saputri PDFДокумент6 страницWinda Saputri PDFwindaОценок пока нет
- Tugas Teori Lakukan Pembangkitan Dengan Metode Cascade Untuk Fenom A, I, U, E, O. Amati Bentuk Sinyal Di Dalam Domain Waktu Dan Domain FrekuensiДокумент6 страницTugas Teori Lakukan Pembangkitan Dengan Metode Cascade Untuk Fenom A, I, U, E, O. Amati Bentuk Sinyal Di Dalam Domain Waktu Dan Domain FrekuensiwindaОценок пока нет
- 2Документ8 страниц2Eliant CalzadaОценок пока нет
- Text Figure (4.2) 1D Discrete Fourier TransformДокумент20 страницText Figure (4.2) 1D Discrete Fourier TransformMohammad Bilal MirzaОценок пока нет
- MessageДокумент11 страницMessageHersz ́Оценок пока нет
- C01cc5b7af21f689 0000000000000000 VsДокумент33 страницыC01cc5b7af21f689 0000000000000000 VstbrunolastОценок пока нет
- DFT SpatialДокумент2 страницыDFT SpatialMaha SyedОценок пока нет
- Fortran Code For Numerical Integration: Part-4Документ6 страницFortran Code For Numerical Integration: Part-4N. T. DadlaniОценок пока нет
- ccc6fb8b53f5f651 0000000000000000 VsДокумент33 страницыccc6fb8b53f5f651 0000000000000000 VstbrunolastОценок пока нет
- Bad Ps 0000Документ3 страницыBad Ps 0000Andika DwiОценок пока нет
- Assignment 2 Modal Analysis of Mechanical Systems: Submitted By, Pranav R ME15M081Документ6 страницAssignment 2 Modal Analysis of Mechanical Systems: Submitted By, Pranav R ME15M081Pranav RaveendranОценок пока нет
- Wolfe WaveДокумент3 страницыWolfe Wavemohamed ibrahimОценок пока нет
- Ass 2 Answer-MPZ4140Документ3 страницыAss 2 Answer-MPZ4140Uditha MuthumalaОценок пока нет
- Sns LAB NO 02 PDFДокумент6 страницSns LAB NO 02 PDFZarafsha AbbasОценок пока нет
- Sns LAB NO 02 PDFДокумент6 страницSns LAB NO 02 PDFZarafsha AbbasОценок пока нет
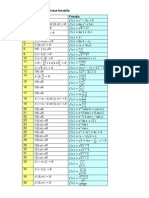
- Să Se Deriveze Funcţiile: NR - Crt. Domeniu FuncţiaДокумент3 страницыSă Se Deriveze Funcţiile: NR - Crt. Domeniu FuncţiaMihaela AlexandraОценок пока нет
- NO Listing Program Hasil: Nama: Rolly Ega Suganda NIM: J1D111025 Laporan Sementara Percobaan 4 PSDДокумент6 страницNO Listing Program Hasil: Nama: Rolly Ega Suganda NIM: J1D111025 Laporan Sementara Percobaan 4 PSDRolly EgasОценок пока нет
- EllipsesДокумент2 страницыEllipsesClement MoralesОценок пока нет
- Codigos Clase2Документ3 страницыCodigos Clase2Brenda NellyОценок пока нет
- 2Документ2 страницы2Nithin SSОценок пока нет
- Functii de 2 VariabileДокумент1 страницаFunctii de 2 Variabilenumer_nine99Оценок пока нет
- Ujian - Regular ExpressionДокумент5 страницUjian - Regular ExpressionchristianОценок пока нет
- Golden RatioДокумент2 страницыGolden RatioNishaMehtaОценок пока нет
- KAMA System CompleteДокумент9 страницKAMA System CompleteAlan MartinezОценок пока нет
- d321199dc854621f 0000000000000000 VsДокумент30 страницd321199dc854621f 0000000000000000 VstbrunolastОценок пока нет
- Ec248df3384d3d18 0000000000000000 VsДокумент31 страницаEc248df3384d3d18 0000000000000000 VstbrunolastОценок пока нет
- Graph S SДокумент1 страницаGraph S Slezharii.34Оценок пока нет
- Experiment:1: KIMG 20200626205550 (1) JPG')Документ12 страницExperiment:1: KIMG 20200626205550 (1) JPG')ALL for WORLDОценок пока нет
- 7d2d26ba00a66735 0000000000000000 VsДокумент34 страницы7d2d26ba00a66735 0000000000000000 VstbrunolastОценок пока нет
- Shear Force and Bending MomentДокумент9 страницShear Force and Bending MomentAnshuman BeheraОценок пока нет
- Chapter1 Fundamental Functions and Limits (1.2) Equations and Curves On Planes Implicit FunctionsДокумент2 страницыChapter1 Fundamental Functions and Limits (1.2) Equations and Curves On Planes Implicit FunctionsAnonymous yJJbs70q2Оценок пока нет
- Function: 'Buffalo (I,:) BP - K (I) 'Документ5 страницFunction: 'Buffalo (I,:) BP - K (I) 'Atul NarkhedeОценок пока нет
- Raport Laborator 3 TOPДокумент13 страницRaport Laborator 3 TOPBogee BgontОценок пока нет
- Taller 2Документ7 страницTaller 2Carlos Adrian Moran CaballeroОценок пока нет
- MATH1009 Test 3 SolutionsДокумент2 страницыMATH1009 Test 3 SolutionsfatdogeОценок пока нет
- 'Value' 'Value' 'Value' 'Value' 'Value' 'Value': % Graficas de CirculoДокумент7 страниц'Value' 'Value' 'Value' 'Value' 'Value' 'Value': % Graficas de CirculoluisОценок пока нет
- Physics: Paper 2Документ16 страницPhysics: Paper 2Mhmd AlrashedОценок пока нет
- 3rd - Sem-Ct-23-Chemical EngineeringДокумент3 страницы3rd - Sem-Ct-23-Chemical EngineeringJay RanjanОценок пока нет
- How To Calculate The NPSH of Pump in HYSYSДокумент3 страницыHow To Calculate The NPSH of Pump in HYSYSAnonymous jqevOeP7100% (3)
- Ind UnitДокумент33 страницыInd UnitSana SanОценок пока нет
- MS9483CДокумент6 страницMS9483CBryan MartinezОценок пока нет
- CPT Brochure 1Документ12 страницCPT Brochure 1jose antonio becerra mosqueraОценок пока нет
- Installation Manual: Remote User InterfaceДокумент12 страницInstallation Manual: Remote User InterfaceALEKSANDARОценок пока нет
- Software For Enumerative and Analytic CombinatoricsДокумент47 страницSoftware For Enumerative and Analytic CombinatoricsamacfiesОценок пока нет
- Musica Universalis First DraftДокумент78 страницMusica Universalis First DraftWilliam1091Оценок пока нет
- 1 Introduction of EOR LecturesДокумент19 страниц1 Introduction of EOR LecturessereptОценок пока нет
- Experimental Physics PDFДокумент2 страницыExperimental Physics PDFJessicaОценок пока нет
- Oelchecker Winter 2016 enДокумент5 страницOelchecker Winter 2016 enAzhar1109Оценок пока нет
- Example Design of A Cold-Formed Steel Lipped Channel Wall Stud in Compression PDFДокумент4 страницыExample Design of A Cold-Formed Steel Lipped Channel Wall Stud in Compression PDFOprisor Costin100% (1)
- Tolerances and FitsДокумент12 страницTolerances and FitsnikitaОценок пока нет
- Unit I - Force Analysis (9) : Systems and Tribology ConceptДокумент82 страницыUnit I - Force Analysis (9) : Systems and Tribology ConceptSaranОценок пока нет
- Workshop 3-3: Rectangular Patch Antenna: Introduction To ANSYS Electronics DesktopДокумент21 страницаWorkshop 3-3: Rectangular Patch Antenna: Introduction To ANSYS Electronics DesktopRodrigoОценок пока нет
- Thermodynamics Definition, Formulas, Laws and Equations - PhysicsДокумент7 страницThermodynamics Definition, Formulas, Laws and Equations - PhysicsRamaKrishnanGОценок пока нет
- Directions Sense Quiz 12Документ16 страницDirections Sense Quiz 12Arijit GhoshОценок пока нет
- Norwegian Maritime-Equipment 2016Документ568 страницNorwegian Maritime-Equipment 2016budiazis100% (1)
- Chirimuuta. Outside ColorДокумент262 страницыChirimuuta. Outside Colorcrazijoe100% (2)
- Risk Assessment Using Design Review Based On Failure ModeДокумент6 страницRisk Assessment Using Design Review Based On Failure ModePaulo LopesОценок пока нет
- OxF125 SignedДокумент6 страницOxF125 SignedJOSE ABADОценок пока нет
- Lesson 29 Stability Analysis of Gravity Dams: Forces and General RequirementsДокумент4 страницыLesson 29 Stability Analysis of Gravity Dams: Forces and General RequirementsabshawОценок пока нет
- National Institute of Technology Durgapur: Department of Chemical EngineeringДокумент2 страницыNational Institute of Technology Durgapur: Department of Chemical Engineeringpiyush dwivediОценок пока нет
- Bearing Basics For Gas-Industry Screw CompressorsДокумент5 страницBearing Basics For Gas-Industry Screw CompressorsDayo IdowuОценок пока нет
- Automation and Robotic Lec 2Документ9 страницAutomation and Robotic Lec 2Josh Sam Rindai MhlangaОценок пока нет
- Nikuradse's ExperimentДокумент50 страницNikuradse's ExperimentAli BahuОценок пока нет
- 1004 Winkler Spring Models PDFДокумент7 страниц1004 Winkler Spring Models PDFkukuh kurniawan dwi sungkonoОценок пока нет
- Yanmar Brochure 02Документ2 страницыYanmar Brochure 02Fabiano OnaibafОценок пока нет