Вам также может понравиться
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- BNB SB0114Документ4 страницыBNB SB0114graziana100% (2)
- 05 Astm Grain Size MeasurementsДокумент27 страниц05 Astm Grain Size MeasurementsnareshОценок пока нет
- Street Design Manual NYCДокумент312 страницStreet Design Manual NYCgonleoОценок пока нет
- 8086 MicroprocessorДокумент8 страниц8086 MicroprocessordiОценок пока нет
- WST Macros Add-In FeaturesДокумент1 страницаWST Macros Add-In FeaturesTrader CatОценок пока нет
- Action Research MAPEHДокумент9 страницAction Research MAPEHEloPoPo100% (4)
- Ultrasonic Inspection of Welds in Tubes & Pipes: Educational NoteДокумент13 страницUltrasonic Inspection of Welds in Tubes & Pipes: Educational NoteleonciomavarezОценок пока нет
- Daily Lesson Log 4Документ5 страницDaily Lesson Log 4Diane Marr Nicolas Dencio100% (2)
- Verilog HDLДокумент48 страницVerilog HDLS RAVIОценок пока нет
- Welcome To The M Notebook For Word!: AtlabДокумент3 страницыWelcome To The M Notebook For Word!: AtlabDEEPAK KUMAR MALLICKОценок пока нет
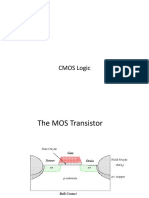
- CMOS LogicДокумент35 страницCMOS LogicS RAVIОценок пока нет
- Introduction To Asics: Application-Specific Integrated CircuitsДокумент21 страницаIntroduction To Asics: Application-Specific Integrated CircuitsRameshkumar JayaramanОценок пока нет
- 2 Bridge Course (2015-16)Документ6 страниц2 Bridge Course (2015-16)S RAVIОценок пока нет
- Asic Library DesignДокумент12 страницAsic Library DesignS RAVIОценок пока нет
- Convolution Matrices For Signal Processing Applications in MATLABДокумент9 страницConvolution Matrices For Signal Processing Applications in MATLABCode-XОценок пока нет
- Help Search ExclusionsДокумент1 страницаHelp Search ExclusionsS RAVIОценок пока нет
- Unit 4Документ1 страницаUnit 4S RAVIОценок пока нет
- Unit-I 16 Marks - Rejinpaul PDFДокумент115 страницUnit-I 16 Marks - Rejinpaul PDFS RAVIОценок пока нет
- EMU8086 TutorialДокумент81 страницаEMU8086 TutorialGaurav Arora50% (4)
- Bus Safety ReportДокумент54 страницыBus Safety ReportS RAVIОценок пока нет
- Unit - Ii System Bus Structure: Course Material (Question Bank)Документ8 страницUnit - Ii System Bus Structure: Course Material (Question Bank)Haritha HariОценок пока нет
- Microcontroller NotesДокумент3 страницыMicrocontroller NotesSunny KumarОценок пока нет
- MCQ1 DC Number Systems and CodesДокумент6 страницMCQ1 DC Number Systems and CodesarijitlgspОценок пока нет
- Unit-I 16 Marks - Rejinpaul PDFДокумент115 страницUnit-I 16 Marks - Rejinpaul PDFS RAVIОценок пока нет
- Ec6504 MP Part AДокумент13 страницEc6504 MP Part ASudha PalaniОценок пока нет
- Bus Safety ReportДокумент54 страницыBus Safety ReportS RAVIОценок пока нет
- An Internship and Summer Training Report Submitted ToДокумент41 страницаAn Internship and Summer Training Report Submitted ToS RAVIОценок пока нет
- EMU8086 TutorialДокумент81 страницаEMU8086 TutorialGaurav Arora50% (4)
- Loaders and LinkersДокумент37 страницLoaders and LinkersS RAVIОценок пока нет
- Causal OutputДокумент1 страницаCausal OutputS RAVIОценок пока нет
- EMU8086 TutorialДокумент81 страницаEMU8086 TutorialGaurav Arora50% (4)
- Microcontroller NotesДокумент3 страницыMicrocontroller NotesSunny KumarОценок пока нет
- 8051 Serial CommunicationДокумент28 страниц8051 Serial CommunicationDrWhoFОценок пока нет
- MCQ1 DC Number Systems and CodesДокумент6 страницMCQ1 DC Number Systems and CodesarijitlgspОценок пока нет
- MCQ2 DC Number Systems and CodesДокумент6 страницMCQ2 DC Number Systems and Codesayush guptaОценок пока нет
- Digital Electronics Sample Chapter PDFДокумент106 страницDigital Electronics Sample Chapter PDFRokiniKumarasamyОценок пока нет
- Astro 429 Assignment 2 AlbertaДокумент2 страницыAstro 429 Assignment 2 AlbertatarakОценок пока нет
- Post-Installed Rebars Design and Analysis: Singapore, 11.03.2016Документ44 страницыPost-Installed Rebars Design and Analysis: Singapore, 11.03.2016SewGuanОценок пока нет
- Brochure Smart Grid Foundation CourseДокумент6 страницBrochure Smart Grid Foundation CourseKULDEEP MEENAОценок пока нет
- Manuel Alava 01-12-10 PLДокумент3 страницыManuel Alava 01-12-10 PLAshley RodriguezОценок пока нет
- Carpentry 7&8 Quarter 4-Module 1.2Документ8 страницCarpentry 7&8 Quarter 4-Module 1.2Mark Laurence EchaluceОценок пока нет
- Quick Start Guide For The Remote Access Dial-In Multiport Ethernet ModemДокумент16 страницQuick Start Guide For The Remote Access Dial-In Multiport Ethernet ModemdilipОценок пока нет
- Danas Si Moja I BozijaДокумент1 страницаDanas Si Moja I BozijaMoj DikoОценок пока нет
- Masterseal 530: Surface Applied Capillary Waterproofing For Concrete and MortarДокумент2 страницыMasterseal 530: Surface Applied Capillary Waterproofing For Concrete and MortarHoang An ViОценок пока нет
- Philippine Airlines Reservation New Timings Dep - 230314 - 193643Документ7 страницPhilippine Airlines Reservation New Timings Dep - 230314 - 193643sophia buiserОценок пока нет
- Esthetics and Shade Communication: A Practical Approach: Clinical ApplicationДокумент21 страницаEsthetics and Shade Communication: A Practical Approach: Clinical Applicationcatalin_adinaОценок пока нет
- Sample Paper English: Kendriya Vidyalaya SangathanДокумент7 страницSample Paper English: Kendriya Vidyalaya SangathanVines and ScienceОценок пока нет
- Final Tana Beles - pdf2222Документ72 страницыFinal Tana Beles - pdf2222Tiruneh Yeneneh100% (1)
- Fact Sheeton Canola OilДокумент15 страницFact Sheeton Canola OilMonika ThadeaОценок пока нет
- Davao Region Slogan Reflective EssayДокумент4 страницыDavao Region Slogan Reflective EssayDonna Elaine OrdoñezОценок пока нет
- Formula SheetДокумент16 страницFormula SheetgwerОценок пока нет
- Architecture of HimalayasДокумент3 страницыArchitecture of HimalayasAndrea CaballeroОценок пока нет
- SUNANDA Hack Aid Plast SPL PDFДокумент2 страницыSUNANDA Hack Aid Plast SPL PDFSheezan KhanОценок пока нет
- 10 de Thi Tieng Anh Hướng Dẫn Giải Chi TiếtДокумент145 страниц10 de Thi Tieng Anh Hướng Dẫn Giải Chi TiếtVuong DiepОценок пока нет
- DP16B Bench Drill PressДокумент20 страницDP16B Bench Drill Pressalfri7370% (1)
- RB in Poultry Feed - 3Документ17 страницRB in Poultry Feed - 3Vishwanath HebbiОценок пока нет
- Latihan Soal Report TextДокумент28 страницLatihan Soal Report TextHidayatul HikmahОценок пока нет
- Kingspan 30 GSNДокумент1 страницаKingspan 30 GSNNoella AguiarОценок пока нет
- Artikel Penelitian Annisa Humairah IbrahimДокумент15 страницArtikel Penelitian Annisa Humairah Ibrahimisma nurhandayaniОценок пока нет