Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Star CCM+ User GuideДокумент406 страницStar CCM+ User GuideEduardo Conceição60% (15)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- AP Human Geography Review Unit 2Документ18 страницAP Human Geography Review Unit 2BaselOsman50% (2)
- Spray Drying TechnologyДокумент234 страницыSpray Drying TechnologyzokimanОценок пока нет
- Slug LowДокумент13 страницSlug LowDr Mohammed AzharОценок пока нет
- Transport Phenomena and Unit Operations - GriskeyДокумент458 страницTransport Phenomena and Unit Operations - Griskeymls333100% (12)
- Modelling of Subcooled Flow Boiling Heat Transfer of Water Through A Vertical Heated PipeДокумент4 страницыModelling of Subcooled Flow Boiling Heat Transfer of Water Through A Vertical Heated PipeDr Mohammed AzharОценок пока нет
- Jet Impingement Heat TransferДокумент67 страницJet Impingement Heat TransferDr Mohammed AzharОценок пока нет
- The Effect of Tray Geometry On The Sieve Tray EfficiencyДокумент9 страницThe Effect of Tray Geometry On The Sieve Tray EfficiencyDr Mohammed AzharОценок пока нет
- Definitions and Fundamental ConceptsДокумент15 страницDefinitions and Fundamental ConceptsDr Mohammed AzharОценок пока нет
- FNKrampa PH DThesisДокумент243 страницыFNKrampa PH DThesisDr Mohammed AzharОценок пока нет
- Hydro Cyclone Thesis 2007Документ239 страницHydro Cyclone Thesis 2007wyma01100% (1)
- Agitator Design PrinciplesДокумент130 страницAgitator Design Principlesimrancenakk100% (1)
- Tsjui Lecture - Chapter 1Документ17 страницTsjui Lecture - Chapter 1Dr Mohammed AzharОценок пока нет
- PDF Multiphase Flow CMДокумент124 страницыPDF Multiphase Flow CMMuhd Jamil Al-HakimОценок пока нет
- Hydro Cyclone Thesis 2007Документ239 страницHydro Cyclone Thesis 2007wyma01100% (1)
- Volume of Fluid Simulation of Boiling Two-Phase Flow in A Vapor-Venting MicrochannelДокумент11 страницVolume of Fluid Simulation of Boiling Two-Phase Flow in A Vapor-Venting MicrochannelDr Mohammed AzharОценок пока нет
- Numerical Calculation Wall-to-Bed Heat-Transfer Coefficients in Gas-Fluidized BedsДокумент13 страницNumerical Calculation Wall-to-Bed Heat-Transfer Coefficients in Gas-Fluidized BedsDr Mohammed AzharОценок пока нет
- Dumel James Melchor DuayДокумент3 страницыDumel James Melchor DuayBle DuayОценок пока нет
- Ryan's DilemmaДокумент11 страницRyan's DilemmaAkhi RajОценок пока нет
- Stratigraphy MCQs With AnswerДокумент10 страницStratigraphy MCQs With Answerkumar Harsh67% (3)
- Energy Thesis StatementДокумент6 страницEnergy Thesis Statementnicoledixonmobile100% (2)
- Volume 2 Part 1 - Civil & Arch SpecificationsДокумент173 страницыVolume 2 Part 1 - Civil & Arch Specificationsanish100% (1)
- Sip Dissertation - Final - Final For CollegeДокумент17 страницSip Dissertation - Final - Final For Collegevikashirulkar922Оценок пока нет
- Tabla QuimicaДокумент12 страницTabla QuimicaPablo PasqualiniОценок пока нет
- Aluminum Alloy 6351 T6 Sheet SuppliersДокумент10 страницAluminum Alloy 6351 T6 Sheet Supplierssanghvi overseas incОценок пока нет
- WPP Jak Campus - Defect All Level - 18042023Документ15 страницWPP Jak Campus - Defect All Level - 18042023bbm FebriОценок пока нет
- Flooding Deagon Flood Flag MapДокумент1 страницаFlooding Deagon Flood Flag MapNgaire TaylorОценок пока нет
- Green Engine 2 PDFДокумент7 страницGreen Engine 2 PDFharivardhanОценок пока нет
- University of LeedsДокумент20 страницUniversity of LeedsYasir KhanОценок пока нет
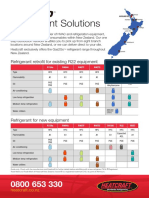
- Refrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentДокумент2 страницыRefrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentpriyoОценок пока нет
- 1984 Population Report EthiopiaДокумент255 страниц1984 Population Report EthiopiaOsvaldas ZagurskasОценок пока нет
- Eoq PDFДокумент10 страницEoq PDFविनय कुमार शर्माОценок пока нет
- L15 - Parallel Magnetic CircuitsДокумент6 страницL15 - Parallel Magnetic CircuitsParikshit MishraОценок пока нет
- Research Proposal PHDДокумент19 страницResearch Proposal PHDSuleiman Mukhtar100% (2)
- Power Stations Using Locally Available Energy Sources: Lucien Y. Bronicki EditorДокумент524 страницыPower Stations Using Locally Available Energy Sources: Lucien Y. Bronicki EditorAmat sapriОценок пока нет
- DattadasДокумент4 страницыDattadasJéssica NatáliaОценок пока нет
- P eДокумент22 страницыP eKiks AshОценок пока нет
- Fender TransformersДокумент2 страницыFender TransformersVincenzo TabaccoОценок пока нет
- The Relaxation Solution Quick Start GuideДокумент17 страницThe Relaxation Solution Quick Start GuideSteve DiamondОценок пока нет
- A Duality Principle For The Entanglement Entropy of Free Fermion SystemsДокумент12 страницA Duality Principle For The Entanglement Entropy of Free Fermion SystemsCroco AliОценок пока нет
- R OR K C S V: EG Epair Its For Ylinder and Ervice AlvesДокумент5 страницR OR K C S V: EG Epair Its For Ylinder and Ervice AlvesLeonardoFabioCorredorОценок пока нет
- Assembly Manual, Operation and Maintenance Round Vibrating Screen Model: Tav-Pvrd-120Документ15 страницAssembly Manual, Operation and Maintenance Round Vibrating Screen Model: Tav-Pvrd-120Sandro Garcia Olimpio100% (1)
- SW Chapter 21 KeyДокумент9 страницSW Chapter 21 KeykylevОценок пока нет
- 500 Word LIST Synonim of TOEFLДокумент22 страницы500 Word LIST Synonim of TOEFLNurul JulinarОценок пока нет
- Welrod Silenced PistolДокумент2 страницыWelrod Silenced Pistolblowmeasshole1911Оценок пока нет
- Practice Exam 3 KEY (Solutions)Документ13 страницPractice Exam 3 KEY (Solutions)joseОценок пока нет