Вам также может понравиться
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Power Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringОт EverandPower Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringОценок пока нет
- Simplified Method For Short Circuit CalculationsДокумент4 страницыSimplified Method For Short Circuit Calculationshaiob100% (1)
- Transmission Lines in Communication Systems - Student Manual PDFДокумент328 страницTransmission Lines in Communication Systems - Student Manual PDFAngelino PimentelОценок пока нет
- Analysis and Review - Secondary Arc Extinction Auto Reclosing For 765 KV EHV TLДокумент3 страницыAnalysis and Review - Secondary Arc Extinction Auto Reclosing For 765 KV EHV TLCarlos Lino Rojas AgüeroОценок пока нет
- Balun DesignДокумент2 страницыBalun DesignUtah UtahОценок пока нет
- S8000-E Ring NetworkДокумент90 страницS8000-E Ring NetworkNguyen Kim Thanh67% (3)
- Estabilidad en Sistemas de PotenciaДокумент50 страницEstabilidad en Sistemas de PotenciaedwinoriaОценок пока нет
- Improving EB104 Amplifier with Transmission Line TransformerДокумент20 страницImproving EB104 Amplifier with Transmission Line Transformerpino100% (1)
- Characterization of A PiezoMUMPs Microsensor For Contactless Measurements of DC Electrical CurrentДокумент10 страницCharacterization of A PiezoMUMPs Microsensor For Contactless Measurements of DC Electrical CurrentOrazio GarofaloОценок пока нет
- Pulsewidth Modulation For Electronic Power Conversion: J. Holtz, Fellow, IEEE Wuppertal University - GermanyДокумент18 страницPulsewidth Modulation For Electronic Power Conversion: J. Holtz, Fellow, IEEE Wuppertal University - GermanyRangesh Babu100% (1)
- Networks Impedance Coupling With One Stub.: Gallegos Santiago, Sambrano Yeslie, V Asquez Mar Ia FernandaДокумент7 страницNetworks Impedance Coupling With One Stub.: Gallegos Santiago, Sambrano Yeslie, V Asquez Mar Ia FernandaFercita VásquezОценок пока нет
- Analytical Models For Low-Power Rectenna DesignДокумент4 страницыAnalytical Models For Low-Power Rectenna DesignmoonyraОценок пока нет
- A Calibration Method For Small Circular LoopДокумент5 страницA Calibration Method For Small Circular LoopaartrajОценок пока нет
- Condition Monitoring For DC-link Capacitors Based On Artificial Neural Network AlgorithmДокумент5 страницCondition Monitoring For DC-link Capacitors Based On Artificial Neural Network AlgorithmMohan Kumar DashОценок пока нет
- Ieee Vol. 11, No. 4, 1996: The Bus. EmtpДокумент9 страницIeee Vol. 11, No. 4, 1996: The Bus. EmtpthavaselvanОценок пока нет
- Fault Location in Power Transformers During Impulse TestsДокумент6 страницFault Location in Power Transformers During Impulse TestsMozar CostaОценок пока нет
- Comparison of Universal Circuit Breaker Arc Representation With EMTP Built-In ModelДокумент6 страницComparison of Universal Circuit Breaker Arc Representation With EMTP Built-In ModelBalajiОценок пока нет
- An LVDT-based Self-Actuating Displacement TransducerДокумент7 страницAn LVDT-based Self-Actuating Displacement TransducerGeorge PetersОценок пока нет
- A New PMU-Based Fault Location Algorithm For Series Compensated LinesДокумент14 страницA New PMU-Based Fault Location Algorithm For Series Compensated Linessameerpatel15770Оценок пока нет
- Electric Current Measurement Using AMR Sensor ArrayДокумент5 страницElectric Current Measurement Using AMR Sensor ArrayShunfu LinОценок пока нет
- A Simplified Neumann'Fso Rmula For Calculation of Inductance of Spiral CoilДокумент5 страницA Simplified Neumann'Fso Rmula For Calculation of Inductance of Spiral CoilBash MatОценок пока нет
- Kez Uno Vic 1992Документ9 страницKez Uno Vic 1992aramirezbenitesОценок пока нет
- Optical Voltage Transducer For Embedded Medium Voltage Equipment: Design and Parameters OptimizationДокумент4 страницыOptical Voltage Transducer For Embedded Medium Voltage Equipment: Design and Parameters Optimizationmafia criminalОценок пока нет
- Circuit Modeling Methodology For UWB Omnidirectional Small AntennasДокумент7 страницCircuit Modeling Methodology For UWB Omnidirectional Small AntennasDr-Gurpreet KumarОценок пока нет
- Final VersionДокумент6 страницFinal VersionLuis PerdomoОценок пока нет
- Transmission Circuit Switching Control System Combining Speed Estimation and N-Legged Converter For Dynamic Wireless Power TransferДокумент4 страницыTransmission Circuit Switching Control System Combining Speed Estimation and N-Legged Converter For Dynamic Wireless Power Transferseraph705Оценок пока нет
- (1997) (d3) Laurent Giauffret 1997 00564090 CPWДокумент6 страниц(1997) (d3) Laurent Giauffret 1997 00564090 CPWSrinivas GuthiОценок пока нет
- Eddy probe system based on new technology for nondestructive testingДокумент6 страницEddy probe system based on new technology for nondestructive testingNatthaphon NaosookОценок пока нет
- An Adantive Generalized Sidelobe Canceller WithДокумент9 страницAn Adantive Generalized Sidelobe Canceller WithNitin KumarОценок пока нет
- Small Microstrip Patch AntennaДокумент2 страницыSmall Microstrip Patch Antenna正气歌Оценок пока нет
- Rogowski Coil Transient Performance and Atp Simulation For Aplications in Protective RelaysДокумент6 страницRogowski Coil Transient Performance and Atp Simulation For Aplications in Protective RelaysJose Alberto RodriguezОценок пока нет
- 3 Development of EMC Measurement and Calibration MethodsДокумент10 страниц3 Development of EMC Measurement and Calibration MethodsAton LuanОценок пока нет
- Analysis of Microgrid Inverter Droop Controller With Virtual Output Impedance Under Non-Linear Load ConditionДокумент10 страницAnalysis of Microgrid Inverter Droop Controller With Virtual Output Impedance Under Non-Linear Load ConditionAnooshdini2002Оценок пока нет
- A Parameter Recognition Based Impedance Tuning Method For SS-Compensated Wireless Power Transfer SystemsДокумент16 страницA Parameter Recognition Based Impedance Tuning Method For SS-Compensated Wireless Power Transfer SystemsNeha RajputОценок пока нет
- Proximity-Aware Calculation of Cable Series Impedance for Systems of Solid and Hollow ConductorsДокумент9 страницProximity-Aware Calculation of Cable Series Impedance for Systems of Solid and Hollow ConductorsVineeth BotsaОценок пока нет
- Sotl 2Документ7 страницSotl 2Syarifah AdrianaОценок пока нет
- Determining Transmission Line ParametersДокумент19 страницDetermining Transmission Line ParametersAnupam Adarsh KumarОценок пока нет
- Design Aspects of RF Switch: Chaitali Anil Muley, S. A. Naveed & Shweta M. ShingareДокумент6 страницDesign Aspects of RF Switch: Chaitali Anil Muley, S. A. Naveed & Shweta M. ShingareTJPRC PublicationsОценок пока нет
- An Electromagnetically Actuated Vacuum Circuit Breaker For 24kV Rated Switchgear "HS-X"Документ2 страницыAn Electromagnetically Actuated Vacuum Circuit Breaker For 24kV Rated Switchgear "HS-X"Basharat AliОценок пока нет
- Lab2 Small Signal DiodeДокумент3 страницыLab2 Small Signal DiodePrincess Roxas CristobalОценок пока нет
- Charge-Voltage Curves of Surge Corona OnДокумент8 страницCharge-Voltage Curves of Surge Corona OnPeterОценок пока нет
- TOMOGRAFO Design OF SENSOR ELECTRONICS FOR CACPACITANCE TOMOGRAPHY PDFДокумент6 страницTOMOGRAFO Design OF SENSOR ELECTRONICS FOR CACPACITANCE TOMOGRAPHY PDFVictor Jose BriceñoОценок пока нет
- Matrix Converter Modulation Strategies: A New General Approach Based On Space-Vector Representation of The Switch StateДокумент1 страницаMatrix Converter Modulation Strategies: A New General Approach Based On Space-Vector Representation of The Switch StatevainateyagoldarОценок пока нет
- Coordinación ProtecciónДокумент7 страницCoordinación ProtecciónDanielAlejandroRamosQueroОценок пока нет
- 00002686Документ3 страницы00002686GautamSikka100% (1)
- Performance Analysis of Compensator: A PWM Inverter VARДокумент12 страницPerformance Analysis of Compensator: A PWM Inverter VARRohit Joshi100% (1)
- 00 Transmission LinesДокумент329 страниц00 Transmission LinesMichael SouropetsisОценок пока нет
- Advanced SVC Control For Damping Power System Oscillations: 524 Transactions On Power Vd.6Документ12 страницAdvanced SVC Control For Damping Power System Oscillations: 524 Transactions On Power Vd.6Sathish Kumar CpОценок пока нет
- Application Notes: Measuring The Non-Rigid Behaviour of A Loudspeaker Diaphragm Using Modal AnalysisДокумент8 страницApplication Notes: Measuring The Non-Rigid Behaviour of A Loudspeaker Diaphragm Using Modal Analysisjhon vargasОценок пока нет
- A Self Test and Dynamics Characterization Circuit For - 2011 - MicroelectronicsДокумент8 страницA Self Test and Dynamics Characterization Circuit For - 2011 - MicroelectronicsrkneskrniОценок пока нет
- 411 Yang-An Efficient Neural Network Macro-Model For Electromagnetic Radiation Spurious Emission Ab982Документ3 страницы411 Yang-An Efficient Neural Network Macro-Model For Electromagnetic Radiation Spurious Emission Ab982Τσιμπινός ΣπύροςОценок пока нет
- Experimental Method to Obtain Wide Frequency Range Equivalent Circuit for Two-Winding TransformerДокумент8 страницExperimental Method to Obtain Wide Frequency Range Equivalent Circuit for Two-Winding Transformerjeos20132013Оценок пока нет
- Rabin FurbДокумент6 страницRabin Furbluis900000Оценок пока нет
- An Eddy Current Array InstrumentДокумент10 страницAn Eddy Current Array InstrumentThanasis KyrgiazoglouОценок пока нет
- P",znerator: AnalysisДокумент7 страницP",znerator: AnalysismemohsОценок пока нет
- A Current Index Approach To Compensate Commutation Phase Error For Sensorless Brushless DC Motors With Nonideal Back EMFДокумент11 страницA Current Index Approach To Compensate Commutation Phase Error For Sensorless Brushless DC Motors With Nonideal Back EMFSUMAN PAULОценок пока нет
- Quantitative Analysis of A Wireless Power Transfer CellДокумент5 страницQuantitative Analysis of A Wireless Power Transfer CellAlamОценок пока нет
- EEE 1106 017 Impact of Series Compensation MHO Distance Relay in Algerian PDFДокумент9 страницEEE 1106 017 Impact of Series Compensation MHO Distance Relay in Algerian PDFostojic007Оценок пока нет
- Active Current Transformer Circuits For Low Distortion Sensing in Switched Mode Power ConvertersДокумент10 страницActive Current Transformer Circuits For Low Distortion Sensing in Switched Mode Power ConvertersDaniel De' SouzaОценок пока нет
- New Model For Transformer Saturation Characteristics by Including HysteresisДокумент7 страницNew Model For Transformer Saturation Characteristics by Including HysteresisNohelia CruzОценок пока нет
- Measuring of Real Value of Short-Circuit Power in Island Operation ConditionДокумент5 страницMeasuring of Real Value of Short-Circuit Power in Island Operation ConditionPadmo PadmundonoОценок пока нет
- Comparison of EPSO, PSO and EP Approaches in Transmission Loss (2012)Документ5 страницComparison of EPSO, PSO and EP Approaches in Transmission Loss (2012)anon_223350147Оценок пока нет
- PDFДокумент6 страницPDFanon_223350147Оценок пока нет
- 50 Years of Schumann ResonanceДокумент15 страниц50 Years of Schumann ResonanceMA-DocОценок пока нет
- Transformer Online Monitoring EnglishДокумент2 страницыTransformer Online Monitoring Englishreza515heiОценок пока нет
- Renewable Energy Sources Optimization: A Micro-Grid Model DesignДокумент12 страницRenewable Energy Sources Optimization: A Micro-Grid Model Designparlin doloksaribuОценок пока нет
- Sensitivity Based Network Contingency Ranking Using Newton Raphson Power Flow Method (2015) PDFДокумент5 страницSensitivity Based Network Contingency Ranking Using Newton Raphson Power Flow Method (2015) PDFanon_223350147Оценок пока нет
- 5611 17079 1 PBДокумент9 страниц5611 17079 1 PBanon_223350147Оценок пока нет
- OLRДокумент3 страницыOLRMazhar SaqlainОценок пока нет
- TPS-Instruction ManualДокумент42 страницыTPS-Instruction ManualGheorghe Gabriel CerneanОценок пока нет
- Lesson Plan for Satellite Communication CourseДокумент3 страницыLesson Plan for Satellite Communication CourseBindia HandaОценок пока нет
- SAIC-P-3017 Rev 7 FinalДокумент14 страницSAIC-P-3017 Rev 7 FinalEnginerShahzadGhaffarОценок пока нет
- 7TCA091720R0091 Primevo Esc Route Recessed 100Документ2 страницы7TCA091720R0091 Primevo Esc Route Recessed 100Daniel IftimiaОценок пока нет
- FOR Approval Specification: 42.0" Wuxga TFT LCD TitleДокумент35 страницFOR Approval Specification: 42.0" Wuxga TFT LCD TitleWalter Petracca100% (1)
- ZX60-3018GДокумент2 страницыZX60-3018GomarhanandehОценок пока нет
- RF-Based Multiple Device Control Using MicrocontrollerДокумент7 страницRF-Based Multiple Device Control Using Microcontrollermv mvОценок пока нет
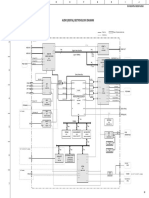
- Block Diagrams: Audio (Digital) Section Block DiagramДокумент19 страницBlock Diagrams: Audio (Digital) Section Block DiagramAran Jed HostelleroОценок пока нет
- Generator technical guidance on shaft bearing currentsДокумент2 страницыGenerator technical guidance on shaft bearing currentsquang_dtd09Оценок пока нет
- 1 Product Category SpecialДокумент16 страниц1 Product Category SpecialOmar SaeedОценок пока нет
- Service Manual: Blu-Ray Disc /DVD Home Theatre SystemДокумент2 страницыService Manual: Blu-Ray Disc /DVD Home Theatre SystemHassan FakhouryОценок пока нет
- Yokogawa RecorderuR1000 43xxx Im D101Документ129 страницYokogawa RecorderuR1000 43xxx Im D101TaufikОценок пока нет
- Wind Energy Research PaperДокумент4 страницыWind Energy Research PaperKumail Hasan NaqviОценок пока нет
- MCQ On Led and LCD TVДокумент3 страницыMCQ On Led and LCD TVBhavishya Sharma09Оценок пока нет
- How To Charge A Lead-Acid Battery With A Li-Ion Charger: Application ReportДокумент9 страницHow To Charge A Lead-Acid Battery With A Li-Ion Charger: Application ReportnarakribОценок пока нет
- Dual Active Bridge Converter Based Battery Charger in Stand-Alone Wind Power Generation System With High-Inertia Wind TurbineДокумент5 страницDual Active Bridge Converter Based Battery Charger in Stand-Alone Wind Power Generation System With High-Inertia Wind TurbinemsmegovindОценок пока нет
- YBS ElevatorCables PDFДокумент4 страницыYBS ElevatorCables PDFYBS CablesОценок пока нет
- Paper - 3 Set AДокумент7 страницPaper - 3 Set Afakir mohammadОценок пока нет
- C500-0055 QSL9 C300D6 OPENSET-Rev00Документ2 страницыC500-0055 QSL9 C300D6 OPENSET-Rev00Jonatas de AndradeОценок пока нет
- CD4011BCДокумент10 страницCD4011BCKike DavilaОценок пока нет
- F-27201 (DuraDrive Globe Valve Product Guide)Документ36 страницF-27201 (DuraDrive Globe Valve Product Guide)NATHANОценок пока нет
- LM555 Timer Circuits GuideДокумент69 страницLM555 Timer Circuits GuidekatambarogersОценок пока нет
- Diagrama de Red WISPДокумент1 страницаDiagrama de Red WISPMiguel García Santiago100% (1)
- FlipflopsДокумент80 страницFlipflopsvikramkolanuОценок пока нет
- Lecture 6Документ7 страницLecture 6Milind BhatiaОценок пока нет
- MACHINESДокумент7 страницMACHINESrv100% (1)
- N2XH-FE 180/E 30: Security Cable, Halogen-Free, 0,6/1 KV, With Improved Fire CharacteristicsДокумент17 страницN2XH-FE 180/E 30: Security Cable, Halogen-Free, 0,6/1 KV, With Improved Fire CharacteristicsDelwinОценок пока нет