Вам также может понравиться
- F.C. Bond Bico Ball Mill Operating InstructionsДокумент25 страницF.C. Bond Bico Ball Mill Operating InstructionsNataniel LinaresОценок пока нет
- Tankcell® Flotation Machine: Bolt ConnectionsДокумент6 страницTankcell® Flotation Machine: Bolt ConnectionsJulver Goyzueta ArceОценок пока нет
- 1.2.1 PF Filter PlatesДокумент52 страницы1.2.1 PF Filter PlatesCristian Pulgar Fabres100% (1)
- Zinn Stein FlotationДокумент8 страницZinn Stein Flotationalexander beltranОценок пока нет
- Probebrochure Rev8Документ7 страницProbebrochure Rev8Matheus TorresОценок пока нет
- 15 - Load - Construction - Type - Resultado Cabeceras (Area 3000)Документ66 страниц15 - Load - Construction - Type - Resultado Cabeceras (Area 3000)Juan Jose San Martin AlfaroОценок пока нет
- Flow Sheet (Solis Egusquiza Ronald)Документ83 страницыFlow Sheet (Solis Egusquiza Ronald)Dan PerezОценок пока нет
- RANDOL AAC PumpcellДокумент9 страницRANDOL AAC PumpcelljadetorresОценок пока нет
- 1.3 Materiales de Caucho para PF Serie 60Документ33 страницы1.3 Materiales de Caucho para PF Serie 60ronald palomino100% (1)
- EMC 3273 E-Cat MechДокумент4 страницыEMC 3273 E-Cat Mechrichard gutierrezОценок пока нет
- CMP2015 - Assessing Vertimill Ultrafine Grinding PerformanceДокумент7 страницCMP2015 - Assessing Vertimill Ultrafine Grinding PerformancerodrigoОценок пока нет
- Curso F Prensa 1Документ52 страницыCurso F Prensa 1Rafael QuilicheОценок пока нет
- Outotec Oktop Agitator Unit UpgradeДокумент2 страницыOutotec Oktop Agitator Unit UpgradegicntОценок пока нет
- Vedanta Green Anode Plant Liquid Pitch Stirring ManualДокумент47 страницVedanta Green Anode Plant Liquid Pitch Stirring ManualSubhransu MohapatraОценок пока нет
- Strategies for Instrumentation and Control of ThickenersДокумент21 страницаStrategies for Instrumentation and Control of ThickenersPablo OjedaОценок пока нет
- Imhoflot pneumatic flotation technologyДокумент8 страницImhoflot pneumatic flotation technologyTandil Amira Matus HernándezОценок пока нет
- Flotation CellsДокумент6 страницFlotation CellsrgongoravОценок пока нет
- Filtro Marco y PlatosДокумент5 страницFiltro Marco y PlatosCesar LapaОценок пока нет
- Operating & Maintenance Manual Mini Pilot Plant System - Compact Lab ColumnДокумент41 страницаOperating & Maintenance Manual Mini Pilot Plant System - Compact Lab ColumnDiego Carhuaz VasquezОценок пока нет
- "Type of Filter and Its Applications in Detail": G H Patel College of Engineering &technologyДокумент11 страниц"Type of Filter and Its Applications in Detail": G H Patel College of Engineering &technologyManav PatelОценок пока нет
- Wemco 11 BrochureДокумент8 страницWemco 11 Brochuresalvador_10Оценок пока нет
- Lamella Sedimentation EquipmentДокумент4 страницыLamella Sedimentation EquipmentTsakalakis G. KonstantinosОценок пока нет
- Curso F Prensa 2Документ55 страницCurso F Prensa 2Rafael QuilicheОценок пока нет
- Paper # 074 - SAG MILL OPERATIONS IN SOSSEGO MINE PDFДокумент9 страницPaper # 074 - SAG MILL OPERATIONS IN SOSSEGO MINE PDFcarloscjunoОценок пока нет
- Zambia DRC Training Plant SideДокумент67 страницZambia DRC Training Plant SideMetalurgista Sos100% (1)
- CIP CIL Interstage Screening SolutionsДокумент4 страницыCIP CIL Interstage Screening SolutionsevalenciaОценок пока нет
- Kemix Interstage Screen BrochureДокумент8 страницKemix Interstage Screen BrochureFernandim SoaresОценок пока нет
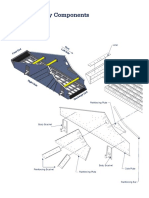
- Liner Assembly-Antamina Project: .63 Total Gap Typical 16 423.21 Available Length 10750Документ1 страницаLiner Assembly-Antamina Project: .63 Total Gap Typical 16 423.21 Available Length 10750jhonОценок пока нет
- Delkor EspesadorДокумент21 страницаDelkor Espesadorrichard gutierrezОценок пока нет
- Pebble Crusher Specific EnergyДокумент10 страницPebble Crusher Specific Energy12milehillОценок пока нет
- Planos SAG Shell PDFДокумент1 страницаPlanos SAG Shell PDFA̶l̶x̶a̶n̶d̶e̶r̶ PaniОценок пока нет
- Cabletorq Thickeners/Clarifiers: Gl&V/Dorr-Oliver100Ft - Dia.Type"S"CabletorqthickenerДокумент4 страницыCabletorq Thickeners/Clarifiers: Gl&V/Dorr-Oliver100Ft - Dia.Type"S"Cabletorqthickenerdgomez686Оценок пока нет
- Cono Sedimentador de LodosДокумент16 страницCono Sedimentador de LodosJaime Olazo MolloОценок пока нет
- Large Flotation Cells in Copper ProcessingДокумент8 страницLarge Flotation Cells in Copper Processinglouza8100% (1)
- Slon Magnetic Separators Applied in TheДокумент8 страницSlon Magnetic Separators Applied in TheMulti DELLОценок пока нет
- Y JEENДокумент1 страницаY JEENYousef AlipourОценок пока нет
- Kemix Interstage-Screen-Brochure 2018 Rev1Документ8 страницKemix Interstage-Screen-Brochure 2018 Rev1evalenciaОценок пока нет
- Selecting The Correct Concentrate Launder DesignДокумент2 страницыSelecting The Correct Concentrate Launder DesignMahlatse Mogashoa0% (1)
- Multotec Injection Moulded Screening Systems-Digital-4c504Документ6 страницMultotec Injection Moulded Screening Systems-Digital-4c504Nilton Inca TitoОценок пока нет
- White Paper On Conveyor Belt CapacityДокумент3 страницыWhite Paper On Conveyor Belt Capacityhimangshu mandal100% (1)
- Top SAG Mill ManufacturersДокумент2 страницыTop SAG Mill ManufacturersRodrigo GarcíaОценок пока нет
- Production of Nickel Concentrate From Ground Sulfide OreДокумент19 страницProduction of Nickel Concentrate From Ground Sulfide OreJadhira RamirezОценок пока нет
- Flowsheet Circuito ChipmoДокумент1 страницаFlowsheet Circuito ChipmoYusep Ronal Segura VillarrealОценок пока нет
- Mintek WAD Cynoprobe for Gold Plant Cyanide AnalysisДокумент8 страницMintek WAD Cynoprobe for Gold Plant Cyanide AnalysisMahlatse MogashoaОценок пока нет
- Celdas Wemco de 60 m3 - Planos IdДокумент17 страницCeldas Wemco de 60 m3 - Planos IdFrancisco Gil100% (1)
- Ws Tyler XL Class PartsДокумент6 страницWs Tyler XL Class Partsyolimar escorciaОценок пока нет
- Unidad Hidráulica PF1019Документ2 страницыUnidad Hidráulica PF1019Juan Carlos Lopez TorresОценок пока нет
- Liquid Ring Vacuum Pumps: LPH 75320, LPH 75330, LPH 75340Документ10 страницLiquid Ring Vacuum Pumps: LPH 75320, LPH 75330, LPH 75340pablodugalОценок пока нет
- 2 - 15B Ah-5vomДокумент1 страница2 - 15B Ah-5vomMamiherintsoa Issaia RanaivoarimananaОценок пока нет
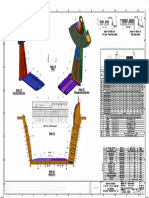
- 13 18 517-443-A Middle Pulp Lifter Chrome Moly St. 2435: Item Qty. P.D.B. Description Material Ref. WT (KG)Документ1 страница13 18 517-443-A Middle Pulp Lifter Chrome Moly St. 2435: Item Qty. P.D.B. Description Material Ref. WT (KG)jhonОценок пока нет
- Siemens manuals for San Cristobal substation project C-479Документ18 страницSiemens manuals for San Cristobal substation project C-479Allen Marcelo Ballesteros LópezОценок пока нет
- 015-80T3-FW8 - Rev 1Документ1 страница015-80T3-FW8 - Rev 1José Luis TolaОценок пока нет
- AFG Alpine Fluidised Bed Opposed Jet Mills (En)Документ10 страницAFG Alpine Fluidised Bed Opposed Jet Mills (En)alevandrorОценок пока нет
- Deep Cone Paste ThicknerДокумент38 страницDeep Cone Paste ThicknerzementheadОценок пока нет
- Maelgwyn Imhoflot (Chile)Документ0 страницMaelgwyn Imhoflot (Chile)crazymax90Оценок пока нет
- 5-12 HSVS Mod-B 416+ 062212Документ73 страницы5-12 HSVS Mod-B 416+ 062212Alan MaidaОценок пока нет
- Service Manual: Separation Unit 840Документ158 страницService Manual: Separation Unit 840Jeros Garcia100% (4)
- 3054 Engine Valve Lash - InspectAdjustДокумент5 страниц3054 Engine Valve Lash - InspectAdjusthenry lavieraОценок пока нет
- Pilot Pressure To The Main Control Valve - CheckДокумент8 страницPilot Pressure To The Main Control Valve - CheckMiguel Angel Moreno100% (8)
- Actuator - 655R IOMДокумент14 страницActuator - 655R IOMvkeie0206Оценок пока нет
- 04-41-92-1 MuДокумент43 страницы04-41-92-1 Muerik masongОценок пока нет
- I 410 MBS Multi Belt Scale WebДокумент2 страницыI 410 MBS Multi Belt Scale Weberik masongОценок пока нет
- Siemens LW39-16B Cam Switch technical specsДокумент17 страницSiemens LW39-16B Cam Switch technical specsfahad pirzadaОценок пока нет
- 34-27-13 AutoBall Charger 301W Operations MaintenanceДокумент28 страниц34-27-13 AutoBall Charger 301W Operations Maintenanceerik masongОценок пока нет
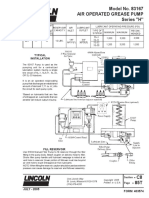
- Model No. 83167 Air Operated Grease Pump Series "H": Typical InstallationДокумент4 страницыModel No. 83167 Air Operated Grease Pump Series "H": Typical Installationerik masongОценок пока нет
- Revision History: Instrument Data SheetsДокумент25 страницRevision History: Instrument Data Sheetserik masongОценок пока нет
- Instrument Data Sheets: Revision HistoryДокумент9 страницInstrument Data Sheets: Revision Historyerik masongОценок пока нет
- Product Code Revision: Outokumpu Mintec OyДокумент23 страницыProduct Code Revision: Outokumpu Mintec Oyerik masongОценок пока нет
- GFA-226B VersaMax SEДокумент2 страницыGFA-226B VersaMax SEerik masongОценок пока нет
- Oi-Or-Con-Ipc 002 F002 Ramsey Beltscale Calibration Report PDFДокумент1 страницаOi-Or-Con-Ipc 002 F002 Ramsey Beltscale Calibration Report PDFerik masongОценок пока нет
- Lay Out Piping of Air Cannon BlasterДокумент3 страницыLay Out Piping of Air Cannon Blastererik masongОценок пока нет
- Technical DataДокумент246 страницTechnical DataABDUL GHAFOORОценок пока нет
- Simatic12 Hmi kp400 ComfortДокумент250 страницSimatic12 Hmi kp400 Comforterik masongОценок пока нет
- 809.201669.050-00 (Operating and Control Philosophy) PDFДокумент23 страницы809.201669.050-00 (Operating and Control Philosophy) PDFerik masongОценок пока нет
- AM3 Code DocumentationДокумент2 страницыAM3 Code Documentationerik masong100% (1)
- D - BERNARD FILEDocumentBROCHUREYASKAWAYaskawa mp2200 Cpu02Документ22 страницыD - BERNARD FILEDocumentBROCHUREYASKAWAYaskawa mp2200 Cpu02erik masongОценок пока нет
- 3BHS112321 - Zab - E51 - F - Acs1000ad Appl SW Amc Table PDFДокумент390 страниц3BHS112321 - Zab - E51 - F - Acs1000ad Appl SW Amc Table PDFerik masongОценок пока нет
- ACS800 Maintenance Schedule 4FPS10000223379 Rev MДокумент2 страницыACS800 Maintenance Schedule 4FPS10000223379 Rev MGomez MancoОценок пока нет
- Bermamn574 Users Manual PDFДокумент32 страницыBermamn574 Users Manual PDFerik masongОценок пока нет
- When Raptor HMI FailsДокумент1 страницаWhen Raptor HMI Failserik masongОценок пока нет
- Regrinder PLCДокумент32 страницыRegrinder PLCerik masongОценок пока нет
- En Acs550 01 Um H A4-1Документ326 страницEn Acs550 01 Um H A4-1Thanh HaiОценок пока нет
- 1im05p03d21-11en 030Документ8 страниц1im05p03d21-11en 030erik masong100% (1)
- 61f PDFДокумент31 страница61f PDFAri SutejoОценок пока нет
- Master Table of Contents Hose PDFДокумент20 страницMaster Table of Contents Hose PDFerik masongОценок пока нет
- SpecsДокумент1 страницаSpecserik masongОценок пока нет
- Electrical Power Systems Wadhwa 6Документ1 страницаElectrical Power Systems Wadhwa 6teceeeОценок пока нет
- CompactRIO CRIO-FRC 8 SlotДокумент25 страницCompactRIO CRIO-FRC 8 SlotHieu LEОценок пока нет
- Chenbro: ES340 Chassis User ManualДокумент21 страницаChenbro: ES340 Chassis User ManualEric NgОценок пока нет
- AUGUST2007 REB500 LДокумент112 страницAUGUST2007 REB500 LRK KОценок пока нет
- 110Документ16 страниц110A FirdausОценок пока нет
- CBSE Class 12th Physics Sample EbookДокумент16 страницCBSE Class 12th Physics Sample EbookmisostudyОценок пока нет
- Ata21 A320Документ41 страницаAta21 A320David Morales100% (1)
- GSB 18 Ve 2 Li Professional Manual 135080 PDFДокумент162 страницыGSB 18 Ve 2 Li Professional Manual 135080 PDFElmer TimanaОценок пока нет
- Dha Suffa University: Course Enrollment FormДокумент1 страницаDha Suffa University: Course Enrollment Formkiranliaquat60Оценок пока нет
- Operational Amplifiers Questions and AnswersДокумент4 страницыOperational Amplifiers Questions and AnswersSuresh L100% (1)
- The Geological Interpretation of Well Logs Malcolm Rider PDFДокумент5 страницThe Geological Interpretation of Well Logs Malcolm Rider PDFgazi0% (1)
- ADB Financed Electric Vehicle Design in The PhilippinesДокумент9 страницADB Financed Electric Vehicle Design in The PhilippinesJerry EsquivelОценок пока нет
- Install GuideДокумент36 страницInstall GuideTonyОценок пока нет
- Electrical Power Up: If External Power Is NeededДокумент22 страницыElectrical Power Up: If External Power Is NeededjohnfcОценок пока нет
- MRA 4 Incoming and Outgoing Feeder ProtectionДокумент2 страницыMRA 4 Incoming and Outgoing Feeder ProtectionFlo MircaОценок пока нет
- AM Signal Bandwidth and Modulation IndexДокумент15 страницAM Signal Bandwidth and Modulation IndexMANDEEP REDDYОценок пока нет
- Report Lab 1Документ15 страницReport Lab 1Mohd Syamsul Ramli100% (1)
- Belcher Road South, Largo, FL 33773 - USA - Tel +1 (727) 447-6140 - Fax +1 (727) 442-5699Документ4 страницыBelcher Road South, Largo, FL 33773 - USA - Tel +1 (727) 447-6140 - Fax +1 (727) 442-5699Usman AzeemОценок пока нет
- Install Stand-Alone PV SystemДокумент37 страницInstall Stand-Alone PV SystemMahad omariОценок пока нет
- Testing Data Radio Modem With Serial Port Tool V1.13: 1. Usb Board DefinitionsДокумент13 страницTesting Data Radio Modem With Serial Port Tool V1.13: 1. Usb Board DefinitionsHimanshu VermaОценок пока нет
- Advanced Power Electronics and Drives LabДокумент8 страницAdvanced Power Electronics and Drives LabAkash MathurОценок пока нет
- 198 Form pg5Документ3 страницы198 Form pg5iosefatu63Оценок пока нет
- Magnetism - Science Year 8Документ15 страницMagnetism - Science Year 8b_syiera100% (7)
- Simatic HmiДокумент324 страницыSimatic HmiAyman ElotaifyОценок пока нет
- Electric Circuits Lab ManualДокумент34 страницыElectric Circuits Lab ManualMohamad FariezОценок пока нет
- (y5ii Cun-u29) Hướng Dẫn Cập Nhật Phiên Bản Android 5Документ4 страницы(y5ii Cun-u29) Hướng Dẫn Cập Nhật Phiên Bản Android 5Sarra ChoucheneОценок пока нет
- Protection I Notes UpdatedДокумент46 страницProtection I Notes UpdatednitalizОценок пока нет
- MS150A Feedback AC Modular Servo SystemДокумент12 страницMS150A Feedback AC Modular Servo SystemWaleed MuradОценок пока нет
- Inst PrabhaДокумент29 страницInst Prabharaj guptaОценок пока нет
- GME Land Communication CatalogueДокумент16 страницGME Land Communication CatalogueRadio PartsОценок пока нет