Вам также может понравиться
- Ev - Part 02 - Vehicle Fundamentals - Part AДокумент55 страницEv - Part 02 - Vehicle Fundamentals - Part AKadir YavuzОценок пока нет
- MinorPROJECT 2020Документ34 страницыMinorPROJECT 2020SNEHASIS MOHANTYОценок пока нет
- Design and Analysis of Braking System For Formula Student CarДокумент7 страницDesign and Analysis of Braking System For Formula Student CarInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Chassis 23 PDFДокумент89 страницChassis 23 PDFpartizan21Оценок пока нет
- DesignДокумент11 страницDesignMahyavanshi DhruvОценок пока нет
- Design Analysis of Fsae Suspension SystemДокумент9 страницDesign Analysis of Fsae Suspension SystemRushik KudaleОценок пока нет
- Formula Student Race Car Suspension System Design AnalysisДокумент9 страницFormula Student Race Car Suspension System Design AnalysisRushik KudaleОценок пока нет
- Final Suspension DesignДокумент60 страницFinal Suspension DesignSNEHASIS MOHANTY100% (1)
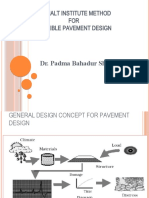
- Asphalt Institute Method FOR Flexible Pavement Design: Dr. Padma Bahadur ShahiДокумент30 страницAsphalt Institute Method FOR Flexible Pavement Design: Dr. Padma Bahadur ShahiPadma ShahiОценок пока нет
- VDHS-1-Funds-load Transfer PDFДокумент125 страницVDHS-1-Funds-load Transfer PDFdrajadОценок пока нет
- Reducing Tire/Wheel Noise Through Design OptimizationДокумент14 страницReducing Tire/Wheel Noise Through Design OptimizationsiritapeОценок пока нет
- Simulation of ATV Roll Cage TestingДокумент5 страницSimulation of ATV Roll Cage TestingIOSRjournalОценок пока нет
- Design and Analysis of Vehicle Front Axle: Ponshanmugakumar A & Rajavel RДокумент6 страницDesign and Analysis of Vehicle Front Axle: Ponshanmugakumar A & Rajavel RTJPRC PublicationsОценок пока нет
- Freightcar PDFДокумент10 страницFreightcar PDFArasouzaОценок пока нет
- Parameterization and Modelling of An Offroad Tires and AnalysisДокумент9 страницParameterization and Modelling of An Offroad Tires and AnalysisKranthi P GОценок пока нет
- Car Suspension AnalysisДокумент8 страницCar Suspension AnalysisShine Khant Mg MgОценок пока нет
- Simulation and Static Analysis of An Off-Road Vehicle Roll CageДокумент8 страницSimulation and Static Analysis of An Off-Road Vehicle Roll CageIJMERОценок пока нет
- Optimization of Double Wishbone Suspension System by Replacing Its Upper Arm by Single Member in Atv IJERTV6IS110006 PDFДокумент6 страницOptimization of Double Wishbone Suspension System by Replacing Its Upper Arm by Single Member in Atv IJERTV6IS110006 PDFMahesh BorateОценок пока нет
- EV TaskДокумент3 страницыEV TaskGainОценок пока нет
- Vehical DynamicsДокумент24 страницыVehical DynamicsLeti HanajОценок пока нет
- Fatigue Analysis and Optimization of Upright of A FSAE VehicleДокумент6 страницFatigue Analysis and Optimization of Upright of A FSAE Vehiclepreetham saiОценок пока нет
- ACS Unit 1 2Документ143 страницыACS Unit 1 2roy rockОценок пока нет
- Amortisseur Ressort EtudeДокумент11 страницAmortisseur Ressort EtudeSliim AmiriОценок пока нет
- Failure Analysis of Automotive Suspension SystemДокумент9 страницFailure Analysis of Automotive Suspension SystemThilli KaniОценок пока нет
- GB Pant Engineering College - BAJA SAE India 2014 - DesignReportДокумент8 страницGB Pant Engineering College - BAJA SAE India 2014 - DesignReportvardaan510Оценок пока нет
- (Reid, Et Al.,2006) - Detailed Tire Modelling For Crash Applications PDFДокумент11 страниц(Reid, Et Al.,2006) - Detailed Tire Modelling For Crash Applications PDFchristos032Оценок пока нет
- Influence of Measurement Conditions On Results of A Wheel Geometry CheckДокумент10 страницInfluence of Measurement Conditions On Results of A Wheel Geometry CheckESHETU SILESHIОценок пока нет
- Paul Wilbur PresentationДокумент14 страницPaul Wilbur PresentationJohn doeОценок пока нет
- Swing Arm Calculation and Analysis JournalДокумент5 страницSwing Arm Calculation and Analysis JournalBálají SèlvakümárОценок пока нет
- A Tire Stiffness Backstepping Observer Dedicated To All-Terrain Vehicle Rollover PreventionДокумент19 страницA Tire Stiffness Backstepping Observer Dedicated To All-Terrain Vehicle Rollover PreventionYash WarkeОценок пока нет
- Asphalt Institute Method For Flexible Pavement DesignДокумент30 страницAsphalt Institute Method For Flexible Pavement DesignHenra HalimОценок пока нет
- A Presentation On: "Modelling of Passenger Railway Vehicle With Radial Bogie & Evaluating Performance Parameters"Документ21 страницаA Presentation On: "Modelling of Passenger Railway Vehicle With Radial Bogie & Evaluating Performance Parameters"Tushar BulungeОценок пока нет
- BK2001 TyresДокумент45 страницBK2001 TyresSan Lwin AungОценок пока нет
- Kuliah Ke 1 - General Pavement DesignДокумент38 страницKuliah Ke 1 - General Pavement DesignrikkisofyanОценок пока нет
- Supension Roll and PitchДокумент21 страницаSupension Roll and Pitchlakshmanakumarr@gmail.comОценок пока нет
- A Tool For Lap Time SimulationДокумент5 страницA Tool For Lap Time SimulationRodrigo BobОценок пока нет
- Section 2 - Rail Vehicle DynamicsДокумент30 страницSection 2 - Rail Vehicle DynamicsSergio RezendeОценок пока нет
- OptimunG Springs&Dampers Tech Tip 5Документ2 страницыOptimunG Springs&Dampers Tech Tip 5Thomas MouraОценок пока нет
- DMV 2023 Design Brief EngineeringДокумент36 страницDMV 2023 Design Brief Engineeringapi-669009841Оценок пока нет
- Simple Car DynamicsДокумент16 страницSimple Car DynamicsVincentius NikimОценок пока нет
- UPES Vehicle Dynamics CourseДокумент1 страницаUPES Vehicle Dynamics CourseGirish ChandranОценок пока нет
- Lecture # 12 ESALsДокумент26 страницLecture # 12 ESALsarslan ali100% (1)
- IJCRT1802035Документ6 страницIJCRT1802035Vignesan MechОценок пока нет
- TireДокумент1 страницаTiremohandgodОценок пока нет
- ITU Electric and Hybrid Vehicle LecturesДокумент75 страницITU Electric and Hybrid Vehicle LecturesKadir YavuzОценок пока нет
- Weiwei Li, Lintao Tian, Shaohong Zhang, Shumao Wang, Xin WangДокумент6 страницWeiwei Li, Lintao Tian, Shaohong Zhang, Shumao Wang, Xin WangMohd SolihinОценок пока нет
- Static Analysis of Wheel Rim Using Catia and Ansys16.0: August 2016Документ7 страницStatic Analysis of Wheel Rim Using Catia and Ansys16.0: August 2016Anonymous 9xvU1FОценок пока нет
- Chassis Engineering GuidebookДокумент142 страницыChassis Engineering GuidebookTapare Ankush90% (39)
- A Tool For Lap Time Simulation PDFДокумент5 страницA Tool For Lap Time Simulation PDFRodrigo BobОценок пока нет
- Vibration Exposure On Fork-Lift TrucksДокумент13 страницVibration Exposure On Fork-Lift TrucksJeferson SilvaОценок пока нет
- ARB DesignДокумент4 страницыARB Designtamilselvan33Оценок пока нет
- Current Trends in Bumper Design For Pedestrian ImpactДокумент16 страницCurrent Trends in Bumper Design For Pedestrian ImpactSahaya robin singh MОценок пока нет
- Design, Static and Dynamic Analysis of An All-Terrain Vehicle Chassis and Suspension SystemДокумент9 страницDesign, Static and Dynamic Analysis of An All-Terrain Vehicle Chassis and Suspension SystemsadsdОценок пока нет
- Lateral Aerodynamics of A Generic Sprint Car ConfigurationДокумент10 страницLateral Aerodynamics of A Generic Sprint Car ConfigurationAllan Bruno RosaОценок пока нет
- Preliminary Design Report for Single-Seat Racing VehicleДокумент8 страницPreliminary Design Report for Single-Seat Racing VehicleAman MaanОценок пока нет
- Tire Dynamics Research Application Based On ADAMS/Tire: LIU Xi, LIU Fang-GangДокумент4 страницыTire Dynamics Research Application Based On ADAMS/Tire: LIU Xi, LIU Fang-GangerpublicationОценок пока нет
- Vehicle Dynamics and Damping: First Revised EditionОт EverandVehicle Dynamics and Damping: First Revised EditionРейтинг: 4 из 5 звезд4/5 (2)
- VD - Part 08 - Brake SystemsДокумент36 страницVD - Part 08 - Brake SystemsEmre DemiralpОценок пока нет
- VD - Part 02 - Automotive Design PrinciplesДокумент58 страницVD - Part 02 - Automotive Design PrinciplesEmre DemiralpОценок пока нет
- VD - Part 11 - Automotive NVHДокумент41 страницаVD - Part 11 - Automotive NVHEmre DemiralpОценок пока нет
- VD - Part 10 - Steering SystemsДокумент21 страницаVD - Part 10 - Steering SystemsEmre DemiralpОценок пока нет
- VD - Part 04 - Power Generation and Energy Storage SystemsДокумент39 страницVD - Part 04 - Power Generation and Energy Storage SystemsEmre DemiralpОценок пока нет
- VD - Part 12 - Automotive Materials and Production TechniquesДокумент44 страницыVD - Part 12 - Automotive Materials and Production TechniquesEmre DemiralpОценок пока нет
- VD - Part 06 - Chassis Systems in GeneralДокумент26 страницVD - Part 06 - Chassis Systems in GeneralEmre DemiralpОценок пока нет
- VD - Part 03 - Body DesignДокумент49 страницVD - Part 03 - Body DesignEmre DemiralpОценок пока нет
- VD - Part 09 - Suspension SystemsДокумент65 страницVD - Part 09 - Suspension SystemsEmre DemiralpОценок пока нет
- VD - Part 05 - Power Transmission SystemsДокумент57 страницVD - Part 05 - Power Transmission SystemsEmre DemiralpОценок пока нет
- VD - Part 01 - Automotive Design PrinciplesДокумент58 страницVD - Part 01 - Automotive Design PrinciplesEmre DemiralpОценок пока нет
- Introduction to History Part 1: Key ConceptsДокумент32 страницыIntroduction to History Part 1: Key ConceptsMaryam14xОценок пока нет
- Food Product Development - SurveyДокумент4 страницыFood Product Development - SurveyJoan Soliven33% (3)
- Structural Works - SharingДокумент37 страницStructural Works - SharingEsvimy Deliquena CauilanОценок пока нет
- 2C Syllable Division: Candid Can/dДокумент32 страницы2C Syllable Division: Candid Can/dRawats002Оценок пока нет
- Comal ISD ReportДокумент26 страницComal ISD ReportMariah MedinaОценок пока нет
- Leku Pilli V Anyama (Election Petition No 4 of 2021) 2021 UGHCEP 24 (8 October 2021)Документ52 страницыLeku Pilli V Anyama (Election Petition No 4 of 2021) 2021 UGHCEP 24 (8 October 2021)Yokana MugabiОценок пока нет
- Toshiba l645 l650 l655 Dabl6dmb8f0 OkДокумент43 страницыToshiba l645 l650 l655 Dabl6dmb8f0 OkJaspreet Singh0% (1)
- Sigma Chi Foundation - 2016 Annual ReportДокумент35 страницSigma Chi Foundation - 2016 Annual ReportWes HoltsclawОценок пока нет
- Sri Lanka Wildlife and Cultural TourДокумент9 страницSri Lanka Wildlife and Cultural TourRosa PaglioneОценок пока нет
- Excel Keyboard Shortcuts MasterclassДокумент18 страницExcel Keyboard Shortcuts MasterclassluinksОценок пока нет
- AVK Butterfly Valves Centric 75 - TAДокумент1 страницаAVK Butterfly Valves Centric 75 - TANam Nguyễn ĐứcОценок пока нет
- As If/as Though/like: As If As Though Looks Sounds Feels As If As If As If As Though As Though Like LikeДокумент23 страницыAs If/as Though/like: As If As Though Looks Sounds Feels As If As If As If As Though As Though Like Likemyint phyoОценок пока нет
- Consent 1095 1107Документ3 страницыConsent 1095 1107Pervil BolanteОценок пока нет
- Classification of Boreal Forest Ecosystem Goods and Services in FinlandДокумент197 страницClassification of Boreal Forest Ecosystem Goods and Services in FinlandSivamani SelvarajuОценок пока нет
- LTD Samplex - Serrano NotesДокумент3 страницыLTD Samplex - Serrano NotesMariam BautistaОценок пока нет
- Research Proposal by Efe Onomake Updated.Документ18 страницResearch Proposal by Efe Onomake Updated.efe westОценок пока нет
- 2010 Economics Syllabus For SHSДокумент133 страницы2010 Economics Syllabus For SHSfrimpongbenardghОценок пока нет
- Statement of The Problem: Notre Dame of Marbel University Integrated Basic EducationДокумент6 страницStatement of The Problem: Notre Dame of Marbel University Integrated Basic Educationgab rielleОценок пока нет
- The Awesome Life Force 1984Документ8 страницThe Awesome Life Force 1984Roman PetersonОценок пока нет
- Resarch Paper On Franchising Business MacobДокумент8 страницResarch Paper On Franchising Business MacobAngelika Capa ReyesОценок пока нет
- Database Interview QuestionsДокумент2 страницыDatabase Interview QuestionsshivaОценок пока нет
- Bpoc Creation Ex-OrderДокумент4 страницыBpoc Creation Ex-OrderGalileo Tampus Roma Jr.100% (7)
- MinePlan Release NotesДокумент14 страницMinePlan Release NotesJuanJo RoblesОценок пока нет
- All Forms of Gerunds and InfinitivesДокумент4 страницыAll Forms of Gerunds and InfinitivesNagimaОценок пока нет
- Search Inside Yourself PDFДокумент20 страницSearch Inside Yourself PDFzeni modjo02Оценок пока нет
- Canine Guided Occlusion and Group FuntionДокумент1 страницаCanine Guided Occlusion and Group Funtionlittlestar35100% (3)
- ILO and Social Security (GROUP B)Документ13 страницILO and Social Security (GROUP B)Dhiren VairagadeОценок пока нет
- EAPP Q2 Module 2Документ24 страницыEAPP Q2 Module 2archiviansfilesОценок пока нет
- 2Документ5 страниц2Frances CiaОценок пока нет
- The Serpents Tail A Brief History of KHMДокумент294 страницыThe Serpents Tail A Brief History of KHMWill ConquerОценок пока нет