Вам также может понравиться
- 18 Engineering Reference - Motor Selection and Sizing PDFДокумент5 страниц18 Engineering Reference - Motor Selection and Sizing PDFSamik MukherjeeОценок пока нет
- Power Engineers Handbook 2012Документ1 страницаPower Engineers Handbook 2012Karthick KumaresanОценок пока нет
- 18 Engineering Reference - Motor Selection and Sizing PDFДокумент5 страниц18 Engineering Reference - Motor Selection and Sizing PDFSamik MukherjeeОценок пока нет
- ET301 Linear Integrated Circuits and ApplicationsДокумент41 страницаET301 Linear Integrated Circuits and ApplicationsChaitanya P V KОценок пока нет
- Power System Protection - Part 10Документ22 страницыPower System Protection - Part 10Matthew WongОценок пока нет
- Complaince Report123 - Rev01Документ1 страницаComplaince Report123 - Rev01Karthick KumaresanОценок пока нет
- Power Flow 21Документ10 страницPower Flow 21sarathoonvОценок пока нет
- MV network design & devices selection guideДокумент31 страницаMV network design & devices selection guideAnonymous kdFzbQ4jfОценок пока нет
- ERPC Meeting on RGMO/FGMO and PSS TuningДокумент8 страницERPC Meeting on RGMO/FGMO and PSS TuningKarthick KumaresanОценок пока нет
- Technical Note Comparison of 4pole and 2pole Designs For Large Motors and Generators en 052011Документ2 страницыTechnical Note Comparison of 4pole and 2pole Designs For Large Motors and Generators en 052011marpadanОценок пока нет
- Muffle Furnaces For Temperatures From 200-1200 C With Controlled Atmospheres and VacuumДокумент6 страницMuffle Furnaces For Temperatures From 200-1200 C With Controlled Atmospheres and VacuumKarthick KumaresanОценок пока нет
- Steam Turbine - Generator Shaft Grounding.Документ146 страницSteam Turbine - Generator Shaft Grounding.Karthick KumaresanОценок пока нет
- AC DC RelaysДокумент2 страницыAC DC RelaysIsuru WijewardeneОценок пока нет
- Variable Frequency Drive: by S.N.LingamДокумент35 страницVariable Frequency Drive: by S.N.LingamKarthick KumaresanОценок пока нет
- MPDFДокумент4 страницыMPDFKarthick KumaresanОценок пока нет
- Faqsbre2010 PDFДокумент1 страницаFaqsbre2010 PDFRakesh Kumar VermaОценок пока нет
- 19th Exam ProspectusДокумент28 страниц19th Exam Prospectusherokaboss1987Оценок пока нет
- Generator ProtectionДокумент128 страницGenerator ProtectionZokiОценок пока нет
- High Speed Tripping Relays VAJH, VAJS and VAJHMДокумент6 страницHigh Speed Tripping Relays VAJH, VAJS and VAJHMvikash sharmaОценок пока нет
- 45 5655 EE542 2014 1 1 1 GeneratorControlModified PDFДокумент18 страниц45 5655 EE542 2014 1 1 1 GeneratorControlModified PDFCuong NguyenОценок пока нет
- Power Flow 21Документ10 страницPower Flow 21sarathoonvОценок пока нет
- 3.5 CORE ALUMINIUM CABLESДокумент1 страница3.5 CORE ALUMINIUM CABLESDulon22100% (1)
- SETTINGSДокумент77 страницSETTINGSKarthick KumaresanОценок пока нет
- EE 340L - Exp 6Документ8 страницEE 340L - Exp 6Karthick KumaresanОценок пока нет
- ww-843 v5Документ4 страницыww-843 v5Karthick KumaresanОценок пока нет
- CT ConnectionДокумент7 страницCT ConnectionKarthick KumaresanОценок пока нет
- Experimental Study of Frequency Oscillations in Islanded Power SyДокумент46 страницExperimental Study of Frequency Oscillations in Islanded Power SyKarthick KumaresanОценок пока нет
- La R0Документ11 страницLa R0Karthick KumaresanОценок пока нет
- SAS Panel - R0Документ71 страницаSAS Panel - R0Karthick KumaresanОценок пока нет
- 0518 T1 007 Cable Trench Layout - R0 PDFДокумент1 страница0518 T1 007 Cable Trench Layout - R0 PDFKarthick KumaresanОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Systemair IV Smart ECДокумент1 страницаSystemair IV Smart ECmarlon kadhir castro mayoralОценок пока нет
- Cat D6RДокумент24 страницыCat D6RRohman0% (1)
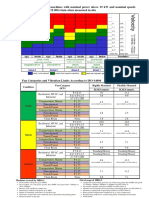
- Limit Table According To ISO (10816-3 and 14694)Документ1 страницаLimit Table According To ISO (10816-3 and 14694)Muhammad Haroon67% (3)
- Product Data: Features/BenefitsДокумент106 страницProduct Data: Features/BenefitscarlosorizabaОценок пока нет
- FanTraining ManualДокумент36 страницFanTraining ManualAnonymous P3U7dcya5vОценок пока нет
- Cooling TowerДокумент60 страницCooling Towerkumar sandeep100% (1)
- 240-2027kW Air-Cooled Screw Chiller With Heat RecoveryДокумент16 страниц240-2027kW Air-Cooled Screw Chiller With Heat RecoveryZaw Moe KhineОценок пока нет
- PSD 09 2018 30RB RQ 017-040 30rby 017 033Документ26 страницPSD 09 2018 30RB RQ 017-040 30rby 017 033Constantin294Оценок пока нет
- Seebaluck Kavish 1214517 Beng (Hons.) Mechatronics Engineering Level 4 Supervised By: Mrs R. Ramjug BallgobinДокумент24 страницыSeebaluck Kavish 1214517 Beng (Hons.) Mechatronics Engineering Level 4 Supervised By: Mrs R. Ramjug BallgobinKavish SeebaluckОценок пока нет
- Training Manual A319 / A320 / A321: ATA 21 Air ConditioningДокумент44 страницыTraining Manual A319 / A320 / A321: ATA 21 Air ConditioningSomendra Brijesh PandeyОценок пока нет
- McQuay McEnergy HPI Installation Manual EngДокумент60 страницMcQuay McEnergy HPI Installation Manual EngPatrick Clarke100% (1)
- Air Conditioning SystemДокумент7 страницAir Conditioning SystemT SRОценок пока нет
- Iso 13350 2015 en PDFДокумент11 страницIso 13350 2015 en PDFvasvuk0% (1)
- ManagementofHeatStressinpoultry Allpages PDFДокумент41 страницаManagementofHeatStressinpoultry Allpages PDFaaronjulesОценок пока нет
- Webasto Heater DBW Range Workshop Manual (Spheros Version)Документ80 страницWebasto Heater DBW Range Workshop Manual (Spheros Version)Smolovic SrdjanОценок пока нет
- Fatigue Failure Analysis of A Cooling Fan Blade: A Case StudyДокумент7 страницFatigue Failure Analysis of A Cooling Fan Blade: A Case StudyJay Dee11Оценок пока нет
- Innovair PEK 60Hz R410a Commercial Package Brochure EnglishДокумент12 страницInnovair PEK 60Hz R410a Commercial Package Brochure Englishcris melos100% (1)
- 6030 DatasheetДокумент12 страниц6030 DatasheetAlain ParisienОценок пока нет
- 2019 Summer Model Answer Paper (Msbte Study Resources)Документ13 страниц2019 Summer Model Answer Paper (Msbte Study Resources)ShantanuОценок пока нет
- Catalogue DL55 North AmericaДокумент56 страницCatalogue DL55 North AmericaJuan Ernesto PerezОценок пока нет
- Operat NG Manual Fo: Februa yДокумент153 страницыOperat NG Manual Fo: Februa yBala RajuОценок пока нет
- Horton S HT-S Fan Drive Repair Kit and PolarDrive Repair Kit Installation Instructions PDFДокумент44 страницыHorton S HT-S Fan Drive Repair Kit and PolarDrive Repair Kit Installation Instructions PDFRolfy Jampol AyzanoaОценок пока нет
- SDB Series Blower Purge Desiccant Dryers 1200-12000 SCFMДокумент4 страницыSDB Series Blower Purge Desiccant Dryers 1200-12000 SCFMramiro alvarezОценок пока нет
- International Standard: Fans - Vocabulary and Definitions of CategoriesДокумент11 страницInternational Standard: Fans - Vocabulary and Definitions of CategoriesprasannaОценок пока нет
- Fluid Mechanics 2 Lab Manual PDFДокумент50 страницFluid Mechanics 2 Lab Manual PDFShahid KhanОценок пока нет
- Air Conditioning (Temperature Control in Military Aircrafts)Документ12 страницAir Conditioning (Temperature Control in Military Aircrafts)AhmedAbdelZaherОценок пока нет
- Samsung Service Manual PDFДокумент72 страницыSamsung Service Manual PDFGoKoh SujaritОценок пока нет
- SERVICE MANUAL - lg+L1404RДокумент39 страницSERVICE MANUAL - lg+L1404RPaulo LaraОценок пока нет
- Approved IRR MAR122014Документ49 страницApproved IRR MAR122014kingsol_archiОценок пока нет
- Chapter 14 TurbomachineryДокумент125 страницChapter 14 TurbomachineryThe Real Napster100% (1)