Вам также может понравиться
- Making A Powerful Linear ActuatorДокумент9 страницMaking A Powerful Linear ActuatorGEORGE KARYDISОценок пока нет
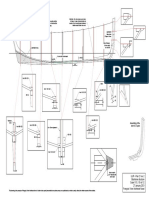
- ILUR - Plan 05 Stations Dimensions (Strip Planking Version) Scale 1/10 23 January 2004 François Vivier Architecte NavalДокумент1 страницаILUR - Plan 05 Stations Dimensions (Strip Planking Version) Scale 1/10 23 January 2004 François Vivier Architecte NavalGEORGE KARYDISОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- The Complete Guide On: Growing An Avocado Tree From SeedДокумент14 страницThe Complete Guide On: Growing An Avocado Tree From SeedJuvito ChamОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- K008 3 SpecsДокумент1 страницаK008 3 SpecsGEORGE KARYDISОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- ILUR - Plan 04 Rev 3 Dimensions Stem and Transom (Clinker) Scale 1/10, 1/5 Et 1/2 29 January 2016 François Vivier Architecte NavalДокумент1 страницаILUR - Plan 04 Rev 3 Dimensions Stem and Transom (Clinker) Scale 1/10, 1/5 Et 1/2 29 January 2016 François Vivier Architecte NavalGEORGE KARYDISОценок пока нет
- Dalys Billiard Boo 00 Daly 1Документ320 страницDalys Billiard Boo 00 Daly 1Abby VernonОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Beam ENДокумент202 страницыBeam ENGEORGE KARYDISОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- DIY Linear Actuator: Step 1: Materials and ToolsДокумент15 страницDIY Linear Actuator: Step 1: Materials and ToolsGEORGE KARYDISОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Greenhouse Monitoring with Wireless Sensor NetworksДокумент7 страницGreenhouse Monitoring with Wireless Sensor NetworksGEORGE KARYDISОценок пока нет
- IMS Billiards 8ball Rules PDFДокумент4 страницыIMS Billiards 8ball Rules PDFGEORGE KARYDISОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Kastri 12: Study PlansДокумент19 страницKastri 12: Study PlansGEORGE KARYDIS0% (1)
- ILUR - Plan 01 Lines Plan (Outside Planking) Clinker Version Scale 1/12 1 December 2003 François Vivier Architecte NavalДокумент1 страницаILUR - Plan 01 Lines Plan (Outside Planking) Clinker Version Scale 1/12 1 December 2003 François Vivier Architecte NavalGEORGE KARYDISОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Kalostyn Study PlansДокумент22 страницыKalostyn Study PlansGEORGE KARYDISОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Complete Guide On: Growing An Avocado Tree From SeedДокумент14 страницThe Complete Guide On: Growing An Avocado Tree From SeedJuvito ChamОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Billiards TutorialДокумент19 страницBilliards TutorialGEORGE KARYDISОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- ILUR - Plan 21 Rev 2 Backbone Structure Scale 1/15, 1/5 Et 1/2 27 January 2013 François Vivier Architecte NavalДокумент1 страницаILUR - Plan 21 Rev 2 Backbone Structure Scale 1/15, 1/5 Et 1/2 27 January 2013 François Vivier Architecte NavalGEORGE KARYDISОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- AДокумент1 страницаAGEORGE KARYDISОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- ILUR - Plan 11 Rev 2 General Arrangement Plan Scale 1/15 19 June 2013 François Vivier Architecte NavalДокумент1 страницаILUR - Plan 11 Rev 2 General Arrangement Plan Scale 1/15 19 June 2013 François Vivier Architecte NavalGEORGE KARYDISОценок пока нет
- Guide to Paco de Lucia's "Zarda De MontyДокумент12 страницGuide to Paco de Lucia's "Zarda De MontyKaram M. BouzidОценок пока нет
- AДокумент1 страницаAGEORGE KARYDISОценок пока нет
- AДокумент1 страницаAGEORGE KARYDISОценок пока нет
- AДокумент1 страницаAGEORGE KARYDISОценок пока нет
- AДокумент1 страницаAGEORGE KARYDISОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Arduino Servo Projects - Robert DavisДокумент104 страницыArduino Servo Projects - Robert Davispipino74100% (8)
- Robosapien Hacking3Документ1 страницаRobosapien Hacking3GEORGE KARYDISОценок пока нет
- Robosapien Hacking2Документ3 страницыRobosapien Hacking2GEORGE KARYDISОценок пока нет
- Robosapien Hacking Guide to Bluetooth Setup</TITLEДокумент2 страницыRobosapien Hacking Guide to Bluetooth Setup</TITLEGEORGE KARYDISОценок пока нет
- Robo Sapien CommandsДокумент2 страницыRobo Sapien CommandsGEORGE KARYDISОценок пока нет
- BasicX 24 PDFДокумент7 страницBasicX 24 PDFGEORGE KARYDISОценок пока нет
- BasicX 24 PDFДокумент7 страницBasicX 24 PDFGEORGE KARYDISОценок пока нет
- Making Symbian Development Easier With FShell: A Console Environment For The Symbian PlatformДокумент13 страницMaking Symbian Development Easier With FShell: A Console Environment For The Symbian PlatformSEE2010 Platform Developer TrackОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Private Cloud App x9!2!8377338Документ35 страницPrivate Cloud App x9!2!8377338Kesava ReddyОценок пока нет
- Processing DevicesДокумент14 страницProcessing DevicesNsubuga MatthewОценок пока нет
- CSE316 Operating Systems Practice Subjective Questions For ETEДокумент9 страницCSE316 Operating Systems Practice Subjective Questions For ETEmanikanta.reddy329Оценок пока нет
- Metastability and Clock Domain Crossing: IN3160 IN4160Документ30 страницMetastability and Clock Domain Crossing: IN3160 IN4160kumarОценок пока нет
- procDF PDFДокумент137 страницprocDF PDFMonty Va Al MarОценок пока нет
- Vsphere 5.5 Command Line Documentation Vsphere Command-Line Interface Documentation Vsphere Command-Line Interface ReferenceДокумент23 страницыVsphere 5.5 Command Line Documentation Vsphere Command-Line Interface Documentation Vsphere Command-Line Interface ReferenceJohn PrincipioОценок пока нет
- G7-L03C469B530 HW La Software Upgrade GuidelineДокумент8 страницG7-L03C469B530 HW La Software Upgrade GuidelineSoporОценок пока нет
- Digital Communication TechniquesДокумент7 страницDigital Communication TechniquesRoshini FelixОценок пока нет
- Deskline 3.0 Availability InterfacesДокумент17 страницDeskline 3.0 Availability InterfacesRebecca WashingtonОценок пока нет
- PIC16 (L) F1938/9 Data SheetДокумент452 страницыPIC16 (L) F1938/9 Data SheetCynthia AlvarezОценок пока нет
- Term Paper About Microsoft AccessДокумент7 страницTerm Paper About Microsoft Accessea20cqytОценок пока нет
- Gartner Reprint Network AnalysisДокумент15 страницGartner Reprint Network Analysisajilani2014Оценок пока нет
- Create A Multiple Partition, Multi-Boot USB Flash Drive Under Windows - RMPrepUSBДокумент6 страницCreate A Multiple Partition, Multi-Boot USB Flash Drive Under Windows - RMPrepUSBदिब्यम प्रभात्Оценок пока нет
- Tushar - Multiple Outlet Shoe Billing SystemДокумент15 страницTushar - Multiple Outlet Shoe Billing SystemponrenugaasОценок пока нет
- Erlangga Jti Uii SIM 2010 Basic Concept of MIS Part 05 Reg IPДокумент28 страницErlangga Jti Uii SIM 2010 Basic Concept of MIS Part 05 Reg IPNoormalita IrvianaОценок пока нет
- Installation Configuration GuideДокумент265 страницInstallation Configuration GuideindiansproudОценок пока нет
- Oracle Performance TuningДокумент18 страницOracle Performance TuningKamalakshi Raj100% (1)
- Project 12Документ7 страницProject 12Rohan lallОценок пока нет
- Med PDFДокумент30 страницMed PDFSharfuddin ShariffОценок пока нет
- Internship Assessment Report On: Prakash Gupta 1812210083 Under The Guidance of Er. Devendra KumarДокумент26 страницInternship Assessment Report On: Prakash Gupta 1812210083 Under The Guidance of Er. Devendra KumarAditya SinghОценок пока нет
- Journey To The Center of The Linux Kernel: Traffic Control, Shaping and QosДокумент15 страницJourney To The Center of The Linux Kernel: Traffic Control, Shaping and Qosph23625765289516Оценок пока нет
- Resume 8Документ1 страницаResume 8Shashank SauravОценок пока нет
- Design Patterns for Building Network Agnostic Android AppsДокумент62 страницыDesign Patterns for Building Network Agnostic Android AppsShree DiiОценок пока нет
- Sony HDR-CX330 CX330E PJ330E PJ340 PJ340E PJ350 PJ350E Lev2Документ19 страницSony HDR-CX330 CX330E PJ330E PJ340 PJ340E PJ350 PJ350E Lev2Rafael LehmkuhlОценок пока нет
- SM3260 Product BriefДокумент1 страницаSM3260 Product BriefMrr LeeОценок пока нет
- FW3505 19.5v1 Introducing Authentication On Sophos FirewallДокумент17 страницFW3505 19.5v1 Introducing Authentication On Sophos FirewallAndré MouraОценок пока нет
- Section A QS1 (A) List Various Characteristics of A System. AS Characteristics of A SystemДокумент18 страницSection A QS1 (A) List Various Characteristics of A System. AS Characteristics of A Systemsarabjit kaurОценок пока нет
- CHP032 - RTU560 Remote Terminal Unit PLC Programming - ConfigurationДокумент1 страницаCHP032 - RTU560 Remote Terminal Unit PLC Programming - ConfigurationMichael Parohinog GregasОценок пока нет
- Post ProcessingДокумент12 страницPost Processingsukhbir24Оценок пока нет