Вам также может понравиться
- PLAXIS2DCE V21.00 01 Tutorial 2DДокумент243 страницыPLAXIS2DCE V21.00 01 Tutorial 2DHasnat QureshiОценок пока нет
- Bridge Foundations Modeling Large Pile Groups For Seismic DesignДокумент150 страницBridge Foundations Modeling Large Pile Groups For Seismic DesignDiego Pontón TomaselliОценок пока нет
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 2012 S. Amoroso Et Al. ISC'4 Coutinho & Mayne PDFДокумент8 страниц2012 S. Amoroso Et Al. ISC'4 Coutinho & Mayne PDFDiego Pontón TomaselliОценок пока нет
- CF Carreno CCДокумент109 страницCF Carreno CCCristopherLaraОценок пока нет
- Especificaciones Geomallas Triax Tx160Документ1 страницаEspecificaciones Geomallas Triax Tx160Diego Pontón TomaselliОценок пока нет
- Especificaciones Geomallas Triax Tx160Документ1 страницаEspecificaciones Geomallas Triax Tx160Diego Pontón TomaselliОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- UGC-01 sCHEDULEДокумент6 страницUGC-01 sCHEDULELingesh SivaОценок пока нет
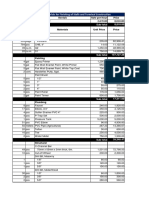
- 3 Hrs Motor Grader 2,670.00 8,010.00: Detailed Bill of Materials For Finishing of Stalls and Terminal ConstructionДокумент2 страницы3 Hrs Motor Grader 2,670.00 8,010.00: Detailed Bill of Materials For Finishing of Stalls and Terminal ConstructionKris Aileen CortezОценок пока нет
- Asme B31.8-2007Документ6 страницAsme B31.8-2007SUHANI CHANDELОценок пока нет
- Overcoming Pipeline Access ConstraintsДокумент12 страницOvercoming Pipeline Access ConstraintsDheeraj Chowdary DhanekulaОценок пока нет
- Ceiling cassetteinstallationIM818MCK PDFДокумент24 страницыCeiling cassetteinstallationIM818MCK PDFTROY2ARCHILLESОценок пока нет
- Power System Protection - Part 10Документ22 страницыPower System Protection - Part 10Matthew WongОценок пока нет
- Brayton and Rankine CycleДокумент12 страницBrayton and Rankine CycleDaryl Calderon100% (1)
- GREE Air To WaterДокумент26 страницGREE Air To WaterZvonimir Batrnek100% (1)
- 06 Muttoni FernandezДокумент47 страниц06 Muttoni FernandezAltin CeroОценок пока нет
- Different Types of Moment FramesДокумент2 страницыDifferent Types of Moment FramesRazell RuizОценок пока нет
- V-King CoreXY - Component Order ListДокумент1 страницаV-King CoreXY - Component Order Listfrankieb99Оценок пока нет
- 2018 Ninja400 SM-Update FinalДокумент653 страницы2018 Ninja400 SM-Update FinalThomas Zoumboulias100% (1)
- DI7140N - EN-Expansion JointДокумент1 страницаDI7140N - EN-Expansion JointHai PhanОценок пока нет
- Chapter 2Документ27 страницChapter 2hailegebreselassie24Оценок пока нет
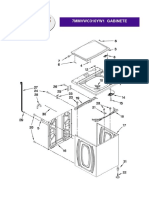
- 7MMVWC310YW11Документ8 страниц7MMVWC310YW11Relavson RefaccionesОценок пока нет
- Physics Project: Topic: To Study Simple Harmonic MotionДокумент7 страницPhysics Project: Topic: To Study Simple Harmonic Motiongorilla soupОценок пока нет
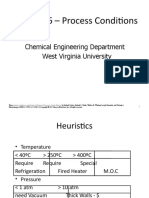
- Chapter 06 - Understanding Process ConditionsДокумент20 страницChapter 06 - Understanding Process ConditionsMohammed DaghurОценок пока нет
- Fluid Lab Report 1Документ7 страницFluid Lab Report 1TamaraTwal100% (1)
- Cummins QSK 23 Fuel Shutoff ValveДокумент8 страницCummins QSK 23 Fuel Shutoff ValvePedro Schembri100% (1)
- MM PT6T-3B 72-3Документ24 страницыMM PT6T-3B 72-3Panca Xp100% (1)
- C Chains APIДокумент1 страницаC Chains APILuisSilvaОценок пока нет
- TSSA-DLB-2020-Feb-09-2021-Biogas ProjectДокумент9 страницTSSA-DLB-2020-Feb-09-2021-Biogas ProjectNazrul IslamОценок пока нет
- Structural Mechanics NotesДокумент6 страницStructural Mechanics NotesAiden A. CunninghamОценок пока нет
- 3TF8 Reversing Contactors - Motor Starters - SiemensДокумент2 страницы3TF8 Reversing Contactors - Motor Starters - SiemensAlberto Morillo ParelladaОценок пока нет
- Refractory Equipment GAODETECДокумент9 страницRefractory Equipment GAODETECorangel anayaОценок пока нет
- Mapex AN0320SN PDFДокумент1 страницаMapex AN0320SN PDFDiegoTierradentroОценок пока нет
- Split Type AcuДокумент40 страницSplit Type AcuKristine Ann ReclosadoОценок пока нет
- Spare Parts Catalogue: AXLE 138670 REF: 138670Документ10 страницSpare Parts Catalogue: AXLE 138670 REF: 138670avant comercialОценок пока нет
- IGCSE 13 Forces&MovementДокумент26 страницIGCSE 13 Forces&MovementHakim Abbas Ali PhalasiyaОценок пока нет
- BPW Service Instructions - KLD 08 2010 ECOPLUS IIДокумент95 страницBPW Service Instructions - KLD 08 2010 ECOPLUS IIpricopdaniel100% (1)