Вам также может понравиться
- Smithells Metals Reference BookОт EverandSmithells Metals Reference BookE A BrandesОценок пока нет
- Robot Manipulators: Modeling, Performance Analysis and ControlОт EverandRobot Manipulators: Modeling, Performance Analysis and ControlОценок пока нет
- SpatialIntro PDFДокумент29 страницSpatialIntro PDFchiranjeeviОценок пока нет
- DH RulesДокумент69 страницDH RulesHoney RathoreОценок пока нет
- Chapter 3 C DH Representation For Robotic ManipulatorsДокумент88 страницChapter 3 C DH Representation For Robotic ManipulatorsCharlton S.Inao100% (1)
- Introduction To RoboticsДокумент32 страницыIntroduction To RoboticsNagarjun SinghОценок пока нет
- Inverse Kinematics PPT (Pak Toni)Документ14 страницInverse Kinematics PPT (Pak Toni)herawanadifОценок пока нет
- Inverse Kinematics For A Rhino RobotДокумент11 страницInverse Kinematics For A Rhino RobotsolteanОценок пока нет
- ME427 LEC11 Forward KinameticsДокумент15 страницME427 LEC11 Forward KinameticsSohaib IrfanОценок пока нет
- Lecture 5 - Displacement Analysis - Part AДокумент30 страницLecture 5 - Displacement Analysis - Part AHafsa RahmeenОценок пока нет
- Lecture 5 - Displacement Analysis - Part AДокумент30 страницLecture 5 - Displacement Analysis - Part AHafsa RahmeenОценок пока нет
- Homework ClassДокумент11 страницHomework ClassHossain100% (1)
- Differentiation: Analytical MethodsДокумент27 страницDifferentiation: Analytical MethodsDexter AhamedОценок пока нет
- Differentiation, Integration and CentroidsДокумент4 страницыDifferentiation, Integration and CentroidsGilberto BernardesОценок пока нет
- Chapter Two Part 2Документ30 страницChapter Two Part 2Wiz Nati XvОценок пока нет
- CH 4: Manipulator Kinematics: Task Space (X, Y, Z,) Joint SpaceДокумент61 страницаCH 4: Manipulator Kinematics: Task Space (X, Y, Z,) Joint SpaceLuật NguyễnОценок пока нет
- Lecture 10 D.K.Analysis 2Документ34 страницыLecture 10 D.K.Analysis 2Krishna KulkarniОценок пока нет
- FPM Formula Sheet 2Документ13 страницFPM Formula Sheet 2Yolo Gamer DudeОценок пока нет
- Saito24 Raman6 GrouptheoryДокумент20 страницSaito24 Raman6 Grouptheory姜義修Оценок пока нет
- Week 1: Analytic Geometry and Conic SectionsДокумент49 страницWeek 1: Analytic Geometry and Conic SectionsPerfect BeanОценок пока нет
- Chapter 7 Robot KinematicsДокумент39 страницChapter 7 Robot KinematicsSiferaw NegashОценок пока нет
- Conics RRRДокумент169 страницConics RRRsunnycheerlaОценок пока нет
- MOs of Metallic DimersДокумент5 страницMOs of Metallic DimersManish KОценок пока нет
- 8 - DH Method of Forward Kinematic - 1Документ5 страниц8 - DH Method of Forward Kinematic - 1Naeemo IraqiОценок пока нет
- Ch12 Graphs of Linear Equations and InequalitiesДокумент22 страницыCh12 Graphs of Linear Equations and InequalitiesVera DuОценок пока нет
- UNIT 2 PPTДокумент98 страницUNIT 2 PPTsuganya004Оценок пока нет
- Lec 06Документ15 страницLec 06Solomon MamoОценок пока нет
- L21Документ12 страницL21kienkienОценок пока нет
- HW 4 Solution PDFДокумент5 страницHW 4 Solution PDFyesОценок пока нет
- HW 4 SolutionДокумент5 страницHW 4 Solutionneha patelОценок пока нет
- HW 4 Solution PDFДокумент5 страницHW 4 Solution PDFyesОценок пока нет
- Tutorial2 PDFДокумент10 страницTutorial2 PDFMihai NicolaeОценок пока нет
- Chapter 4 Spring 2021Документ28 страницChapter 4 Spring 2021Mahmoud Ahmed TawfikОценок пока нет
- Quantum Theory of The Hydrogen AtomДокумент72 страницыQuantum Theory of The Hydrogen AtomPallavi SinghОценок пока нет
- Mid Term Test - : SolutionsДокумент11 страницMid Term Test - : SolutionsJuju JantonОценок пока нет
- ParabolaДокумент13 страницParabolaAtapolLeetrakulОценок пока нет
- Multiplicative Ideal Theory PDFДокумент57 страницMultiplicative Ideal Theory PDFvictorkrullОценок пока нет
- Mathematics Review Notes - Complete Conic Sections (Explanation and Application of All Types of Graphs) - University and Senior High School StudentДокумент5 страницMathematics Review Notes - Complete Conic Sections (Explanation and Application of All Types of Graphs) - University and Senior High School StudentMaria BeatriksОценок пока нет
- Lesson 1.1 CircleДокумент23 страницыLesson 1.1 CircleSTEM 8 PRODUCTIONSОценок пока нет
- Geometria ENДокумент3 страницыGeometria ENziednouira50Оценок пока нет
- Robotics I: X X Z X Z ZДокумент8 страницRobotics I: X X Z X Z Zasalifew belachewОценок пока нет
- M4-02 MultipliersДокумент10 страницM4-02 MultipliersAhmed ShafeekОценок пока нет
- Kinematic Modelling and Maneuvering of A 5-Axes Articulated Robot ArmДокумент7 страницKinematic Modelling and Maneuvering of A 5-Axes Articulated Robot ArmengrodeОценок пока нет
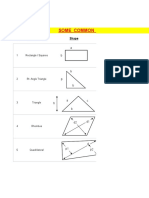
- Common Mensuration Formulae: Drawing SR - No Object Surface AreaДокумент4 страницыCommon Mensuration Formulae: Drawing SR - No Object Surface AreamariaLazarus75% (4)
- Signal Flow GraphДокумент36 страницSignal Flow Graphveenadivyakish100% (1)
- Formulaes of AreasДокумент12 страницFormulaes of Areasssankar142Оценок пока нет
- Gambar Bentangan enДокумент13 страницGambar Bentangan enAndrea Mega PutraОценок пока нет
- Lesson 2.3-Parabola PDFДокумент19 страницLesson 2.3-Parabola PDFChelsea RoqueОценок пока нет
- Lect 2 Coordinate SystemsДокумент57 страницLect 2 Coordinate SystemsBarış DuranОценок пока нет
- Mecanismos ProblemaДокумент2 страницыMecanismos ProblemaManuel ChavezОценок пока нет
- Theory 2 PDFДокумент25 страницTheory 2 PDFEr. Narender SinghОценок пока нет
- Manipulator KinematicsДокумент61 страницаManipulator KinematicsHoang Minh ThangОценок пока нет
- Course Material (Students)Документ46 страницCourse Material (Students)Lamjed AouaniОценок пока нет
- 7.2 Integral Calculus 02 SolutionsДокумент6 страниц7.2 Integral Calculus 02 SolutionsKurt Marfil100% (3)
- Centroids & Centers of GravityДокумент8 страницCentroids & Centers of GravityElle HeartfiliaОценок пока нет
- Lesson 2.2-CIRCLE PDFДокумент23 страницыLesson 2.2-CIRCLE PDFChelsea RoqueОценок пока нет
- AE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 1: MTAB Mini Robot Subject: Batch 8, MTAB Mini RobotДокумент5 страницAE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 1: MTAB Mini Robot Subject: Batch 8, MTAB Mini RobotPravallika Yadav100% (1)
- Hsslive-Ch 11. Conic SectionДокумент7 страницHsslive-Ch 11. Conic SectionRose martinОценок пока нет
- ABCD &hermite Gaussian Beams 2019Документ37 страницABCD &hermite Gaussian Beams 2019Marco ValerdiОценок пока нет
- Chapter 4VGUДокумент27 страницChapter 4VGUTuОценок пока нет
- Module 1 Properties of QuadrilateralsДокумент27 страницModule 1 Properties of QuadrilateralsHenry Languisan100% (2)
- CPCTCДокумент31 страницаCPCTCGabs GaryОценок пока нет
- Classwork 3Документ21 страницаClasswork 3Leyla NamazovaОценок пока нет
- (Worksheet) Pythagoras Theorem PDFДокумент1 страница(Worksheet) Pythagoras Theorem PDFjkj1370Оценок пока нет
- Third Space Learning Transformations GCSE WorksheetДокумент18 страницThird Space Learning Transformations GCSE Worksheetmiapeachapplepiko000279001Оценок пока нет
- Mind Action Series Igrade 11 Paper 2 MemorandumДокумент10 страницMind Action Series Igrade 11 Paper 2 MemorandumlashefosterОценок пока нет
- 4th - Similarity. Proportional Segments LP 9Документ3 страницы4th - Similarity. Proportional Segments LP 9Ara HerreraОценок пока нет
- Surface Area and Volume (Assignment-1)Документ2 страницыSurface Area and Volume (Assignment-1)wordsandherrОценок пока нет
- Trigonometric Ratios of Special Angles (30 - 60 - 90) : Learning Activity Sheet # 2.1Документ4 страницыTrigonometric Ratios of Special Angles (30 - 60 - 90) : Learning Activity Sheet # 2.1Allyssa BuenaОценок пока нет
- Article 1 Lema CoaxalitateДокумент7 страницArticle 1 Lema CoaxalitatetusherОценок пока нет
- Warm Up: Find The SUM of The Interior Angles in A 25 GonДокумент4 страницыWarm Up: Find The SUM of The Interior Angles in A 25 GonMichaelJohnLerumОценок пока нет
- Geometry Formula SheetДокумент2 страницыGeometry Formula SheetNilesh Godse100% (1)
- The Beginning of Greek MathematicsДокумент102 страницыThe Beginning of Greek MathematicsRene Jay-ar Morante SegundoОценок пока нет
- Assignment 1Документ13 страницAssignment 1UtkarshОценок пока нет
- Chapter 4Документ6 страницChapter 4api-239235443Оценок пока нет
- Class 2 Math Workbook 2Документ30 страницClass 2 Math Workbook 2Masnoon MorshedОценок пока нет
- Visualizing Solid Shapes Class VIIIДокумент9 страницVisualizing Solid Shapes Class VIIIDivyanshiОценок пока нет
- Making Platonic Duals ActivityДокумент3 страницыMaking Platonic Duals Activityapi-355107616Оценок пока нет
- Y7 Math RevisionДокумент6 страницY7 Math RevisionAskiitians Education CentreОценок пока нет
- General Equations of 2nd DegreeДокумент5 страницGeneral Equations of 2nd DegreeSneha PaulОценок пока нет
- MATHS Olevels NotesДокумент18 страницMATHS Olevels NotesMahad Imran100% (8)
- Compound AnglesДокумент3 страницыCompound AnglesShantanu AryaОценок пока нет
- COMPILED 3RD PERIODICAL TEST (Mam Inkay Peralta)Документ94 страницыCOMPILED 3RD PERIODICAL TEST (Mam Inkay Peralta)Jaizy BartoloОценок пока нет
- Completing The Square A Larger Than 1 QДокумент6 страницCompleting The Square A Larger Than 1 QanuОценок пока нет
- 2nd Quarter Assessment Math 10Документ7 страниц2nd Quarter Assessment Math 10Erick DiosoОценок пока нет
- Rhs Axiom: by Group 4Документ8 страницRhs Axiom: by Group 4SairajОценок пока нет
- Algebraic ExpressionДокумент5 страницAlgebraic ExpressionSabariah OsmanОценок пока нет
- Art-Lp PolygonДокумент11 страницArt-Lp PolygonIvan MolinaОценок пока нет
- Intermediate Mathematical Challenge: Solutions and InvestigationsДокумент21 страницаIntermediate Mathematical Challenge: Solutions and InvestigationsDoddy FeryantoОценок пока нет
- Std10 Maths TM 2Документ180 страницStd10 Maths TM 2ganesan 0011Оценок пока нет