Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Fuel Injection PumpДокумент8 страницFuel Injection PumpSai Indrakaran Reddy Cherabuddi100% (1)
- GHG ToolДокумент80 страницGHG ToolAhmed MazenОценок пока нет
- Production of Biodiesel From Zobo' (Hibiscus Sabdariffa L.) Seed OilДокумент50 страницProduction of Biodiesel From Zobo' (Hibiscus Sabdariffa L.) Seed OilBimbo AdulojuОценок пока нет
- Libyan Oil ReservesДокумент12 страницLibyan Oil Reservesmohammad_abubakerОценок пока нет
- Embraer 175Документ2 страницыEmbraer 175Lalitya Dhavala100% (2)
- LP ByPass SystemДокумент43 страницыLP ByPass SystemAshwani Dogra50% (2)
- Bilge System: Is A Drainage System That HandlesДокумент46 страницBilge System: Is A Drainage System That HandlesSiskal Dd100% (3)
- Komatsu PC600-6 SEAM046200T Operation & Maintenance ManualДокумент262 страницыKomatsu PC600-6 SEAM046200T Operation & Maintenance Manual梁秀敏60% (5)
- MBE 926 ManualДокумент122 страницыMBE 926 ManualCharles Tooraen83% (12)
- New LP 7505 Douple Drum RollerДокумент15 страницNew LP 7505 Douple Drum RollerRauf Gebreel100% (1)
- OCIMF Annual Report 2013Документ48 страницOCIMF Annual Report 2013SimmarineОценок пока нет
- Emissions StandardsДокумент4 страницыEmissions StandardsZoel AsОценок пока нет
- F Is Brochure Fuel Injection System FAQ's TITAN® EXP™ Fuel Injection System System Compatible With Unleaded GasДокумент2 страницыF Is Brochure Fuel Injection System FAQ's TITAN® EXP™ Fuel Injection System System Compatible With Unleaded GasSumit RaiОценок пока нет
- Design & Analysis of A Cogeneration Plant Using WHRДокумент5 страницDesign & Analysis of A Cogeneration Plant Using WHRSrinivas TangellapalliОценок пока нет
- Warrior Engineering PaperДокумент14 страницWarrior Engineering PaperangusОценок пока нет
- VW Passat b4 Simos Injection System EngДокумент113 страницVW Passat b4 Simos Injection System EngscribdОценок пока нет
- Me B EnginesДокумент12 страницMe B EnginesSabari SasichandranОценок пока нет
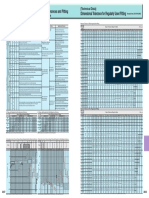
- Dimensional tolerance chart for machine elementsДокумент1 страницаDimensional tolerance chart for machine elementstrisakti.agusОценок пока нет
- Momentum TransferДокумент12 страницMomentum TransfermohitreddyОценок пока нет
- Brochure ZX 138-5GДокумент5 страницBrochure ZX 138-5GVicky FirdausОценок пока нет
- GLTV3 Level SensorДокумент2 страницыGLTV3 Level Sensoreisman diazОценок пока нет
- Cim-Tek CLMДокумент14 страницCim-Tek CLMAgung WidodoОценок пока нет
- Crawler Tractor Specifications and DimensionsДокумент8 страницCrawler Tractor Specifications and DimensionsVlad SuteuОценок пока нет
- Maxsys LTD BrochureДокумент2 страницыMaxsys LTD BrochureaslamsmlОценок пока нет
- Jenbacher Type 6 Fs en Metric 2016Документ2 страницыJenbacher Type 6 Fs en Metric 2016laiquz zamanОценок пока нет
- Short Catalogue Normalab-V.en-2012Документ16 страницShort Catalogue Normalab-V.en-2012Hilario ZanardiОценок пока нет
- Fouling Factor TEMAДокумент2 страницыFouling Factor TEMAIynulF.OmarОценок пока нет
- HydrocrackingДокумент16 страницHydrocrackingdhrumil savaliaОценок пока нет
- CV Fariz Khairul Arifin Mechanical Engineer IndonesiaДокумент2 страницыCV Fariz Khairul Arifin Mechanical Engineer IndonesiaFaris Khairul ArifinОценок пока нет
- Perhitungan Anaerobik Digester, Floating Dome, Fixed DomeДокумент51 страницаPerhitungan Anaerobik Digester, Floating Dome, Fixed DomesehonoОценок пока нет