Вам также может понравиться
- Cálculos Quimica AnaliticiaДокумент319 страницCálculos Quimica AnaliticiaIsmael Elenes Zazueta41% (22)
- Pruebas de Identificación Del BencenoДокумент1 страницаPruebas de Identificación Del Bencenoanon_214710Оценок пока нет
- ASO DE Odelación Financiera: Fecha: 15/08/2022 Nombre Del Estudiante: SILVIA GUADALUPE AGUIRRE LOPEZДокумент3 страницыASO DE Odelación Financiera: Fecha: 15/08/2022 Nombre Del Estudiante: SILVIA GUADALUPE AGUIRRE LOPEZAdrix PlaceОценок пока нет
- Colorantes Listo +isbn PDFДокумент254 страницыColorantes Listo +isbn PDFanon_214710Оценок пока нет
- Colorante AzoicosДокумент17 страницColorante Azoicosanon_214710Оценок пока нет
- Equilibrio Liquido-Vapor Etanol-AguaДокумент3 страницыEquilibrio Liquido-Vapor Etanol-Aguaanon_214710Оценок пока нет
- Hs-Cera de Abejas-10100Документ3 страницыHs-Cera de Abejas-10100anon_214710Оценок пока нет
- Inf 2001 087Документ155 страницInf 2001 087anon_214710Оценок пока нет
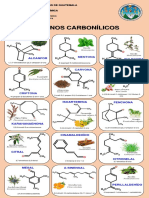
- Baner Terpenos Oxigenados Carbonilicos PDFДокумент1 страницаBaner Terpenos Oxigenados Carbonilicos PDFanon_214710Оценок пока нет
- Baner Ácidos Carboxílicos PDFДокумент1 страницаBaner Ácidos Carboxílicos PDFanon_214710Оценок пока нет
- Hoja de Datos Originales CorrecciónДокумент2 страницыHoja de Datos Originales Correcciónanon_214710Оценок пока нет
- Ley Contra La VaganciaДокумент6 страницLey Contra La Vaganciaanon_214710Оценок пока нет
- Tipos de Tasa de Interes y Tipos de CambioДокумент10 страницTipos de Tasa de Interes y Tipos de Cambioanon_214710Оценок пока нет
- Independencia - HomogeneidadДокумент4 страницыIndependencia - Homogeneidadanon_214710Оценок пока нет
- Interpretación de ResultadosДокумент4 страницыInterpretación de Resultadosanon_214710Оценок пока нет
- Examen Final Reporte 1Документ20 страницExamen Final Reporte 1anon_214710Оценок пока нет
- Ejercicios Rodadura Sin ResbalarДокумент1 страницаEjercicios Rodadura Sin Resbalaranon_214710Оценок пока нет
- Mr. TaylorДокумент1 страницаMr. Tayloranon_214710Оценок пока нет
- TRILLO - Adulteración de La Cera de Abeja. Problemática en Su Industrialización y Comercialización.Документ33 страницыTRILLO - Adulteración de La Cera de Abeja. Problemática en Su Industrialización y Comercialización.anon_214710Оценок пока нет
- Evidencia 3 Analisis de Caso Generalidades de La Oferta y La DemandaДокумент23 страницыEvidencia 3 Analisis de Caso Generalidades de La Oferta y La DemandaSebastianОценок пока нет
- PRAC.2 GRAFICAS Hernandez Reyes GustavoДокумент35 страницPRAC.2 GRAFICAS Hernandez Reyes GustavoMarse SantiagoОценок пока нет
- Prueba de Hipotesis para La Media Conocida OkДокумент23 страницыPrueba de Hipotesis para La Media Conocida OkWilliam SmithОценок пока нет
- PDFДокумент6 страницPDFJorge PazОценок пока нет
- Teoría Binomial y NormalДокумент7 страницTeoría Binomial y NormalXxxxxxxxxОценок пока нет
- Analisis de Las Diferencias Rurales Yy Urbanas en El Rendimiento Educativo de Los Estudiantes ColombianosДокумент26 страницAnalisis de Las Diferencias Rurales Yy Urbanas en El Rendimiento Educativo de Los Estudiantes ColombianosBraydon andres Silva zapataОценок пока нет
- Tolerancias y GraficasДокумент94 страницыTolerancias y GraficasFernando OlveraОценок пока нет
- Proyectodeestadistica FinalДокумент27 страницProyectodeestadistica FinalJohana RosalesОценок пока нет
- Taller 9. Prueba de HipótesisДокумент1 страницаTaller 9. Prueba de HipótesisAndres Esteban Murillo MorenoОценок пока нет
- Teoria Del RiesgoДокумент45 страницTeoria Del RiesgoRolfrecrism Mendoza QuispeОценок пока нет
- Capítulo Cadenas de MarkovДокумент14 страницCapítulo Cadenas de MarkovMackendy CerageneОценок пока нет
- Ejercicios de SemanasДокумент20 страницEjercicios de SemanaslondyОценок пока нет
- Estudio R&RДокумент5 страницEstudio R&RLuis AlbertoОценок пока нет
- Metodología Preliminar para Emplear en Control de Topografía en Sistema de Cracking - DICTUC PDFДокумент4 страницыMetodología Preliminar para Emplear en Control de Topografía en Sistema de Cracking - DICTUC PDFAntonioОценок пока нет
- S07.s2 - Distribución NormalДокумент31 страницаS07.s2 - Distribución Normalnathaly nicol ramirez garciaОценок пока нет
- Serie 2Документ4 страницыSerie 2Bautista Ortega ElviaОценок пока нет
- Tema 5 PDFДокумент10 страницTema 5 PDFlanubenegraОценок пока нет
- Estimación EstadísticaДокумент6 страницEstimación EstadísticaMaricel Anahi Carbajal SantacruzОценок пока нет
- Plantilla. Experimento 1Документ3 страницыPlantilla. Experimento 1Wilson VelezОценок пока нет
- S05.s1 - Taller #2Документ7 страницS05.s1 - Taller #2Álex JùńïorОценок пока нет
- Estadistiac Proyecto Final UNIVERSIDAD TECNICA PARTICULAR DE LOJAДокумент15 страницEstadistiac Proyecto Final UNIVERSIDAD TECNICA PARTICULAR DE LOJAKatherine Peñarreta CabreraОценок пока нет
- ASOCIACIÓNДокумент4 страницыASOCIACIÓNEdgar RamosОценок пока нет
- Foro 11 - Semana 11Документ4 страницыForo 11 - Semana 11Brayan AtiroОценок пока нет
- Trabajo Final Publicar-Medidas de Tendencia CentralДокумент22 страницыTrabajo Final Publicar-Medidas de Tendencia CentralAna María Gómez MoralesОценок пока нет
- Clase Estadística y Proba Ing MetalúrgicaДокумент123 страницыClase Estadística y Proba Ing MetalúrgicagabrielОценок пока нет
- 3 - Verificando La Estabilidad Del ProcesoДокумент23 страницы3 - Verificando La Estabilidad Del ProcesoamayorgaОценок пока нет
- Suelos y GeotecniaДокумент4 страницыSuelos y GeotecniaDaniel MurilloОценок пока нет
- LP-PR-17 Estimación de La Incertidumbre (v05)Документ10 страницLP-PR-17 Estimación de La Incertidumbre (v05)Yordan FalconОценок пока нет
- Final de Estadistica InferencialДокумент83 страницыFinal de Estadistica InferencialLeo MarxialОценок пока нет