Академический Документы
Профессиональный Документы
Культура Документы
Control Design of An Automotive Urea SCR Catalyst
Загружено:
Moses DevaprasannaОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Control Design of An Automotive Urea SCR Catalyst
Загружено:
Moses DevaprasannaАвторское право:
Доступные форматы
Proceedings of IMECE2002
Proceedings of ASME:
ASME International Mechanical Engineering Congress & Exposition IMECE
November-17, 2002, New
November 17–22, 2002, New Orleans, Louisiana Orleans
IMECE2002-32103
IMECE-2002-DSC-32103
CONTROL DESIGN OF AN AUTOMOTIVE UREA SCR CATALYST
Devesh Upadhyay/Ford Motor Company Michiel Van Nieuwstadt/Ford Motor Company
ABSTRACT
The leading aftertreatment technologies lbr NOx removal catalyst, to be used in this work, is presented in [1]. The SISO
from the exhaust gas of lean burn engines, Diesels in particular, model, as represented by Equations (la) and (lb), has three
are urea based Selective Catalytic Reduction (SCR), Lean NOx states: gas phase concentration of NOx, the surface coverage
Traps (LNT) and Active Lean NOx Catalysts (ALNC). It is fraction due to adsorbed ammonia and the gas phase
generally believed that the SCR technique has the potential of concentration of NH3.
providing the best NOx conversion efficiency relative to the
other techniques. Nonetheless, it is crucial that the high
conversion efficiencies be achieved with a minimum slippage Desorption
of unreacted ammonia as tail pipe emissions. This necessitates
a precise control over the urea injection process. The complex NOx ill r~ Oxidation ,~ .
( .' 1~10 X OU[
behavior of the catalyst substrate with respect to adsorption and
desorption of ammonia in conjunction with a lack of "stored
ammonia" sensing capabilities makes the control problem
challenging. In this paper we present a model-based control
design approach using a lumped parameter model of an SCR NH3in
system that includes the essential dynamics of the plant. The NH3 slip
model includes the adsorption, desorption and surface coverage Ammonia adsorptionl NoAmmonia adsorption
•-) NO~ reduction I --) no NOx reduction
dynamics, along with the NOx reduction and ammonia
oxidation dynamics based on the relevant chemical reaction Figure 1: Schematic of basic operation of an ammonia based
rates. SCR catalyst plant.
INTRODUCTION
- CNo(Oscl¢m,.I) 0 + . ~ - ) + OscRoxO
The SCR catalyst plant exhibits complex dynamics. Figure
1 shows a schematic of the basic operation of an ammonia
based SCR catalyst system used in automotive applications.
= + + + R-o.,)+ R.,,SN.,
-- F --
High conversion efficiencies can be achieved only if the right
balance between ammonia injection and surface coverage is L ' k ' "' ~o,J ' '
attained while avoiding excessive desorption and oxidation of
ammonia, both of which are detrimental to the catalyst al
performance. Oxidation of the adsorbed ammonia happens at
+ 0 t'' U + d
high temperatures, (350 - 400 deg C), and leads to the creation
of more NOx. Desorption of the adsorbed ammonia on the
other hand leads to ammonia slip. An important feature of the
L Tl
(la)
SCR based system is the urea delivery system. The successful
performance of any control strategy depends on the optimal JC'v° 1 Ob)
conversion of the injected aqueous urea into gaseous ammonia. Y=[I 0 01Cv,3
jO
In this paper we do not include these considerations, our
control input is assumed to be gas phase ammonia. The where:
detailed development of a control-oriented model of the SCR
1 1 Copyright
Copyright©©2002
####bybyASME
ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 01/27/2018 Terms of Use: http://www.asme.org/about-asme/terms-of-use
I - Ej ~ . . . . . . . . . . . . . . . . .
)
j = ads', des, red, ox.
O = [ , All o
AI2 Ool (3)
(Ai,~ + AlkAli) (AiiA,~+ A.A.) AI~A~
NOMENCLATURE
Rj: Reatcion rate for reaction j = ads', des, red, ox.
where A0 is the "i,j-th" entry of the linearized system matrix, A,
kj: pre-exponential terms for reactionj. [vol/mole]. as shown above. The rank of the matrix is generically 3, but it
C~ : concentration of species x [mole/vol]. loses rank at certain operating conditions. When A23 = 0, the
ON,,~: surface coverage fi'action [dimensionless]. rank of the observability Grammian is 2, and the unobservable
®s~.: total ammonia storage capacity [moles/vol]. state corresponds to CNlt3. This condition occurs when x2 = 0 =
1, i.e. when the surface is completely covered with ammonia.
R: universal gas constant [kJ/kmole/K].
Clearly, when the surface is saturated, no more adsorption of
T: Temperature [Kelvin].
ammonia can occur, and the output NOx concentration contains
Y: Output concentration of NO, (CNo), available as
no information on the output ammonia concentration, CNH3.
measurement [mole~roll When A,2 = 0, the rank of the observability Grammian is 1, and
U: Inlet concentration ofNH~, ( c NH3),
l#l
[mole/vol]. the unobservable states are x2 = 0 and x3 - C N I t 3 . This condition
d: is a known and bounded disturbance input --) inlet occurs when ~,,=~,,,,.c',,<~, i.e. when the rate of NOx
concentration of NO, (c:~:o), [mole/vol]. production due to oxidation of ammonia equals the rate of NOx
F:Constant flow rate through catalyst [m3/sec] reduction by ammonia, regardless of the ammonia
V,,: Catalyst volume [m3]. concentration and the surface coverage. Under this condition,
the output NOx concentration is independent of ammonia
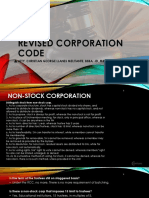
OBSERVABILITY AND CONTROLLABILITY ANALYSIS concentration C N m The singularities correspond to operating
In this section we present results from the observability conditions we must avoid during normal operation. Complete
and controllability analysis based on a linearized version of the surface coverage is undesirable, since it requires high ammonia
plant model represented by Equations (la) and (lb). For the concentrations and is likely to produce slip. Under normal
sake of convenience we will refer to the states as: circumstances we require 7(,<<< 2~, .c,,, since we expect the
X I : C.V 0 catalyst to reduce NOx, not to create it. Figure 2 shows that for
x2 =O reasonable levels of NOx concentration, CNO~, on the order of
X3 = UNIt3 104 mol/m3, and for reasonable temperature ranges, T< 400°C,
Linearization of Equations (la) and (lb) about some we have 7)i,~ << R,,,,,. C v.. Hence the loss of observability due to
operating point "op" leads to the following linear state space this condition is of no great concern. Even though the
representation: observability grammian is generically full rank, it is
2 = Ax + btU + b2d, x c g13, U c 911,d ~ 91', & bounded (2) numerically ill-conditioned everywhere: the ratio of the largest
y = Ca,ye 9t I and smallest eigenvalues is on the order of 105, as shown in
where: Figure 3. The nominal point was chosen as: [CNox, O, CNm] =
[0.001, 0.5, 0.001], and each variable was varied independently
around the operating point. It is interesting to note that the
= A2 b~ ~= , c=[l o o] condition number of this matrix is independent of NOx and
Aa2 A31 ammonia concentrations, states x~ and x3, provided the smallest
and largest eigenvalues straddle the first eigenvalue. This can
be easily verified from the form of the observability grammian.
A,, = -o,~.,.:~-U t;' I ,,,,' A,~ = (-o.:.,.:,
-- .o,&,),.,, The state corresponding to the smallest eigenvalue is x3 = CNII3.
This means it will be hard to design an observer that achieves
A~3 = 0
convergence in the ammonia concentration CNU3. Fortunately,
A~, : (- R.,..&,,,A. : (- R-,,,.~ + ~,.., + R-,,,,,,~,+ ~,,),,. we are most interested in the surface coverage fraction o.
A. (~..,,,,,.0- ~)),,,,
=
A. = o, A. . (o,,&,>,,x, + O,,..~,,,,d,,,
• k .... v<.,,, )<,,,
We proceed by analyzing the observability properties of the
linearized system in Equation (2). The observabilty Grammian
takes the form:
2 Copyright © 2002 by ASME
2 Copyright © #### by ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 01/27/2018 Terms of Use: http://www.asme.org/about-asme/terms-of-use
'1' " I '1'" Similarly the controllability Grammian for the linearized
_._ m,,.~:,m+b.,,~: CNox = ~ J,, ,, plant can be shown to be:
I I I I
I I I I I
-5
I I I I
0 0 FAI2A2~
I I I I I
I I I I ~m (4)
I I I I I
I I I I i FA~ ( FA22A2~+ FA2~A~
I I I I C= 0
i
I I I I
-10 . . . . . . . "1 . . . . . . r . . . . . . . I. . . . . . . "f . . . . . . . I. . . . . . . .
I
I
I
I
I
I
I
I
I
I
F b~l,3 ( FA23A3,+ FA:~)
I
I I I I K,,, K., K ....
I I I I
I I I I I
-15 . . . . . -I . . . . . . . b . . . . . . . I. . . . . . . 4 . . . . . . . I. . . . . . . .
I I I I I The controllability Grammian exhibits properties similar to
I I I I I
[ I I I I the oservability Grammian, in that it loses rank under exactly
I I I I I
I I I I I the same conditions as the observability Grammian, (but with
I I l I
-20 the rank and singularity switched with respect to the
observability Grammian). For A23 = 0, rank((;) = 1 and the
uncontrollable states correspond to xj and x2. Physically this
corresponds to the condition of surface coverage fi'action, 0 =
-25 . '-, ' ,, 1, leading to a loss of control influence over the NOx
100 200 300 400 500 600
concentration and the surface coverage fi'action. Obviously
T rdesC1
once 0 = 1 is achieved, further injection of ammonia will
Figure 2: Logarithm of the observabitity boundary: c =_~" influence neither the state x2 nor will it have any effect on NOx
.or ]~'ed reduction. The second condition under which the
controllability Grammian loses rank is A12 = 0, with rank (C) =
2, x~ is the uncontrollable state. In the context of controllability
Cendifionn u n ~ e r o f o b e e - w a ~ t y Gnmunian
[-
x 10 ~ this condition corresponds to a loss of control influence over
5, I. . I
/
. . . I I
I I the NOx concentration at the catalyst outlet as the rate of
I I
I I .... + IOO*C m x reduction of NOx and the rate of oxidation of NH3 to NOx
4.5 "[ . . . . . I. . . . . . . . . . . .
within the catalyst are in equilibrium. Note that Figure 2 also
I I
I
t
I
I
defines the controllability boundary for the catalyst.
I
I
I
41 ....... -'N; I O B S E R V E R DESIGN
I
. . . . . F . . . . . . . . . . . In a typical atttomotive application of the SCR catalyst
I I
system, the only measurement available is the NO~
l I
/
I
I
I .
. . . . I.
. . . .
I"
. .
. . . . .
I
I
i" . . . . . . . . . . .
concentration at the catalyst outlet, hence, y = xj. As will be
shown in the next section, it is essential to have some
¢ I 1 L . . . . . i_ _ _ .I . . . . . L . . . . . i_ _ information on the other states as well for eM~ctive control
I I I I I I I
I I I I I I I design. Since no sensors are currently available for ammonia
I I I
. . . . . . , ....... J. . . . . . L. . . . . . lI . . . . .
__d_ _ ILL . . . . . II_ _ sensing and determining surface coverage fraction, it is
I I I
I I I
I
I
I
I
I
I
essential to design an observer for the surf~,ce coverage fraction
I i I I I I
and the ammonia slip concentration. We propose a linear
_1.,~_. . . . . . ,. . . . . . . s ..... L . . . . . I. . . . . / . . . . . . I -
I I I I I I - - - I observer
I I I I I I
I I I I I I d
1 . . . . . i. . . . . I . . . . . L . . . . . I. . . . . / . . . . . L . . . .
---J = f(J,U,d) ~-I,. (C['v,,- CNa,) (5)
I I I I I I I dt
I I I I I I I
I I I I I I I
where ~=ld.,.o,.,&c~,,J denotes the observer states, and f
0.5 __.---_.t_____ denotes the nonlinear system dynamics of the plant as shown in
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0, C_NO~ CN-I~
Equation (la, lb). We simply pick L = [-10, 20, 0]'
and verify
that the eigenvalues of the linearization of the system in
Equation (2) are in the left half plane. As explained above, due
Figure 3: Condition number of the observability Grammian at the high condition number of the observability Grammian, we
several operating points. cannot control the convergence rate of the error in CNm, but
have to rely on the stable open loop dynamics for this state to
converge. Figure 4 shows the convergence of this observer on a
staircase profile of the input NOx concentration d. The NOx
output is contaminated by uniform random noise with
3 Copyright © 2002 by ASME
3 Copyright © #### by ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 01/27/2018 Terms of Use: http://www.asme.org/about-asme/terms-of-use
amplitude 5.10 r' mole/m 3 (roughly 0.5% of the signal output.) where c~ is the relative weighting for ammonia slip. For the
The convergence is very decent indeed. Note that if we cross sake of simplicity, we will assume a = 1, hence an efficiency of
the observability boundary (high temperatures and low NOx 100% would imply x~ = x3 = 0. Using the conversion efficiency
concentrations), the second gain in the matrix L has to change definition in (6b) the desired values of the states xs and x3 can
sign to negative. When more NOx is being oxidized than be written as:
converted, a positive estimation error ~,,,,,, _c,,,will result in a x.,, + x~,, = d(I -'l,, ) (7a)
negative CO~Tectionto surface coverage 0. Additionally, from the steady state condition for the state
equations we get:
x 10-3 step polile '#l = 0 ~
41 .... ! . . . . . - Fd (7b)
-- + O,~,C-~w;X2d
Vc.~
2~'~/ :! .... :- -il- i: .... !,: !:.... I%
k~ ,t~tiPn~ E 'eclio Xld =
e,~,~,,,<,,,<~,, + L,;
[d
°,b°~,,p I I I I I I I i k 2 =0~
O ' , ~ . ~ _ . E • _._ ~ _~ • ..... 4 - ~ -, ,
0 33 40 60 80 100 1~ 140 160 180 2if) = G,<.,. +-G<,,~,,, +3 ~,,~ o <_ <i
1 . . . . . .
[ ! F~OesA
itedO~~r~'~l Substituting for x1<1 from Equation (7b) into Equation (7c) we
(7c)
O
k ~ t _ " ~ _.. i _ L • J __ _J __L
. . . . ! .......
.__~L~ _.1
get:
Fd
40 m m I00 120 140 I® 180 mo (---I-Osvt~,,.X2t I
]'~I)I Y +l;~ltl,,,)
-- ] . V. .H . . . " ~ ~ ~ I+R,,- - "
I (O,;cRI¢I,I)X21 + - - I
I , , , / .... c rrnoi/n-~ , , / t .... L,) (7d)
/ , , , / r~< '".' ' ' /
I I I , i I X3<, ~l;;,<:,(i _ X2,t) X2,,,O<x2, t < 1
I , , , /~ estlnlated c. ' ' -I
f
k i i i I I i i
i i I ', ' 1 , Equations (7b) and (7c) are the desired values for the states xs
and x3 in terms of the desired value of state x2. Notice that the
0 20 40 60 80 100 120 140 160 180 200 desired value for the state X3d has a singularity at x2a = 1, a
time[s] condition that was earlier shown to affect the controllability of
the plant. Substituting Equations (7d) and (7b) into Equation
Figure 4: Observer convergence resulting fi'om a staircase (7a) we can define the desired value of the state x2 in terms of
profile in NOx and NH~: input NOx levels are 100, the desil'ed conversion efficiency. This procedure yields the
200, 300, 100 ppm intervals of 50 seconds duration following expression for the desired value of the state x2:
each. NH3 is injected stoichiometrically. 2~ + bx~a + c = 0
agg2, (7e)
Temperature is held constant at 300 deg C. where:
a = ® s.ci?-J,r,,i?-/u:,,+ 2® sc RRm Rox - RA,~.vRox + dOsv L¢,,. E,,J.,' (1 - q,t )
DESIRED CONTROL OBJECTIVES
~,: r(R.,<~+ L , + aG,>- .~,.j+ e,~ G L . ~
The primary objective of any control law for the SCR plant
should be to maximize the NOx conversion efficiency while - dO -,l(, Xo.,.~.s¢,,<,m..,).~ - ~,,,.,.)
maintaining minimal ammonia slip. The conversion efficiency c = q<iRA,uFd
can be defined in two ways; the traditional definition is based where : F = F I C,,, "
strictly on the NOx conversion as: Similarly, following the procedure outlined earlier, the desired
xl (6a) value for the control, Ua, can be derived from the third state
rh = 1 - - -
d equation as follows:
This definition of the conversion efficiency does not account
(7o
for ammonia slip, which must be constrained to values as small
as possible. An alternate definition of the conversion
efficiency can be coined to include the effect of ammonia slip The solution for x2u, the surface coverage fraction, readily
as shown in Equation (6b) follows fi'om Equation (7e) as:
xi + a x3 (6b)
rh = 1 - b +_ ,~-~i _ 4 a c (7g)
d X2 d --
2a
4 Copyright © 2002 by ASME
4 Copyright © #### by ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 01/27/2018 Terms of Use: http://www.asme.org/about-asme/terms-of-use
with, x2~~ ~ [0 1), based on Equation (7d).
Surface Covoraye Fraction 200 degC Ammonia input
However, given the complexity of the system equations it is
" ......... ............ ........ ............
evident that a numerical solution is essential. For the case 1 'll ........ i ........ i ......... :........... : ~ .. i 'i
where 0 < qa -< I, numerical solution of Equation (7g) confirms
that the solution for, x2,~ ~ [0 1), takes the form:
X2 d -- o,o o.oo o.y , . . .o. . . . . . :"
2a
This can also he readily vet(fed fi'om the fact that for the
300 deg
catalyst formulation considered, the adsorption rate R,as ........ : ! . c°'°l 1""[ ~ ..............
dominates all other rates (R,,~., >>R~s.R~)x.R,u.:.). Such a
catalyst is said to exhibit inactivated adsorption behavior [4].
The case where rl, = 0, is impractical. Nonetheless, we will
consider this case for the sake of completeness. For this 1 0.005 ~ " 0,8 1
condition c = 0 and Equation (7e) reduces to:
a- x 2 a 2 + bx2,~ = 0
where: ~ = a[,,.,:~,,t; = hi,,,.,,, cl,,.,.o = O'
......... 450.I
do~C~
The resulting solutions are X2d
= 0 or x2~
, = -- ~ "
a
For zero conversion efficiency, it is expected that the surface 0.01 "~, : " : .... ......... ~ 1
coverage fraction will also be zero, hence x2,1- O. In order to
get this solution, Equation (7g) must take the form 0 04 ' -0.0 o.ooo 0,oo 0.oo 0 o,5
NOx in [moles/m3] ' Ffficiency HOx in h)l)m] Ellieienc
-b+~--dac, (thus there is a switch in the numerical
X2 d --
2a Figure 5: Response surfaces for desired surface coverage
solution lbr x2,1, for the condition of zero coverage). It then fraction and control input (ammonia quantity) for
follows fi'om Equation (7d) that xsj = 0, and fi'om Equation (7f) different operating conditions.
that U,~ = 0, hence this solution corresponds to a zero ammonia
input condition. Zero conversion efficiency can be achieved This is easily explained by the fact that low activity of the
even with a non-zero ammonia input (for the conversion cold catalyst leads to little or no ammonia consumption, hence
efficiency definition (6b) for conditions where the active all the injected ammonia contributes toward increased surface
desorption and oxidation of ammonia is possible. coverage. However, since the conversion efficiency
Mathematically this corresponds to the condition: formulation seeks to penalize any ammonia slip the numerical
xl, t + x~,I = d & x~, I > 0 . solution does not return surface coverage fraction values
Figure 5 shows the response surfaces for the desired surface greater than 1. For the case when the catalyst is active;
coverage fraction, x2a, and the desired control input, U,~, for ammonia is continuously being consumed by the NOx
different catalyst operating temperatures. The desired efficiency reduction process (and possibly released due to desorption),
was varied fi'om 50% to 100%, while the inlet concentration of hence we see lower surface coverage. The third case is for a
NOx was varied between: 0.00t to 0.01 [mole/m3]. The space hot catalyst, when both oxidation and desorption of the
velocity of the gas flow through the catalyst was held constant adsorbed ammonia are the dominant phenomena. The surface
at 30,000 hr ~. coverage fraction takes on negative values (as does the value
The first set of surfaces corresponds to a catalyst substrate tbr the desired ammonia input) for high levels of desired
temperature of 200°C, at which temperature the catalyst is not conversion efficiencies and low NOx input. These are
hot enough to be fully active. For low levels of desired physically unachievable conditions and point to the fact that for
conversion efficiencies, the solution for the surface coverage the given condition such efficiencies are unattainable. For
fraction results in values that are less than 50%. For higher other combinations of surface coverage fi'action and conversion
levels of conversion the solution forces the surface (:overage efficiency, the desired surface coverage fi'action is in the 1%
fi'action to approach fall coverage. This is an artifact of the low range. Note that for the given condition (hot catalyst) it is
conversion rates mentioned earlier. The second set of surfaces crucial that all ammonia be immediately consumed via the
corresponds to the condition when the catalyst is fully active. reduction mechanism. Any residual surface coverage will
An active catalyst makes it possible to achieve high conversion result in simultaneous oxidation and desorption of ammonia
levels even with low levels of surface coverage. Note that leading to slip of both ammonia and NOx (fi'om the oxidation
similar levels of ammonia input results in almost 100% surface of ammonia). This will in turn lead to a loss in conversion
coverage for the cold catalyst, while much lower levels are seen efficiency. Hence we see the very low levels of surface
for an active catalyst. coverage for the third case.
5 Copyright © 2002 by ASME
5 Copyright © #### by ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 01/27/2018 Terms of Use: http://www.asme.org/about-asme/terms-of-use
until a temperature of approximately 150°C is reached. In order
CONTROL DESIGN to investigate the interaction of the controller and the catalyst
We propose a sliding mode control design approach using with respect to ammonia slip, two separate control schemes
the regular form technique. A system in regular form takes the were tested. In Scheme 1, the plant was allowed to be under
following structtLre: closed loop control for the entire duration, in the second
2, : f, (x,, x2, t) scheme, the plant was open-loop controlled until the catalyst
22 -.- f2(X~, X 2 , t ) + B 2 ( X ,, X 2, t)U temperature reached 150°C, after which the plant was closed-
where loop controlled. The idea was to investigate which scheme
U~9i',X, e g i ..... ,X 2c9~'',B 2~. mxm,& dct(B2)v 0 allowed the catalyst to begin its activity with a better initial
surface coverage fraction. Figure 7 compares the surface
Notice that only the second block (X2) has a direct influence of
coverage fi'action response foE" the two schemes. Scheme 1
control, and that we can treat the state vector X2, as fictitious
control for the first block. The two-stage design procedure, allows a faster rate of surfhce coverage; notice that the catalyst
already has coverage of 80% by the time it achieves a
selection of the switching manifold and the determination of
temperature of 200°C as opposed to only 10% for Scheme 2.
the control thai enforces sliding mode in this manifold,
Figure 8 compares the ammonia slip due to the two schemes.
becomes simpler for systems that are in the regular form. For
Scheme 1 shows substantially higher levels of slip relative to
more details on this procedure, the reader is referred to [2, 3].
Scheme 2 for the first 200 seconds, however, the slipped
Inspection of the plant Equations in (la) and (lb) reveal that
amount due to Scheme 2 is not at all significant. Figure 9
although the syslem equations are in the "regular form," (with
compares the conversion efficiencies tbr the two schemes.
X~ = x3,), the state equation for x j, does not have a direct
During the first 200 seconds Scheme I outperforms Scheme 2
influence from the state x~ as fictitious control, rather the
after which both schemes show the same pedbrmance level. It
influence is through the surface coverage state x2, the dynamics
can therefore be concluded the greater benefits offered by
of which are known to be extremely slow. l lence a switching
Scheme 2 with regard to NOx conversion efficiency during the
manifold design of the tbrm S = x~, although usable, will not
first 200 seconds of the cycle makes it more attractive.
provide satisfactory control action. This problem can be easily
rectified by selecting a switching manifold of the following
form: 45C ............................................................
S al~"I -l-I~lX39 with aj being some tunable gains.
: (8a) Inlet NOx concentration [ppm]
40( }° o° Outlet NOx concentration [ppm]
The next step is to enforce sliding mode in this switching
Catalyst Temperature [deg C]
manifold; this is accomplished by determining the appropriate
control that enforces the condition: $5;' < 0. 3N
5i~~ < 0 =~, ~' = - M s i g n ( S ) , M >0 (8b)
thus: 30f- Low Activity
an5q + cta2 ~ : c~lfpI + ot~(fp,~ + I" U) = - M s i g n ( S )
V~m
where
21= fp~ , 2:~ = fp3 ~ 1" U
V~.,,
This leads to a control U of the form:
F U = V~'-~c[- Ms'ign(S) - a,(,oL- a3(p~] (8c)
6¢3
It is worthwhile to note that the selection of the sliding
mmfifold as in Equation (8b) implicitly ensures that
approaching the sliding surface (S-->0) maximizes the
conversion efficiency as defined in Equation (6b). Since a
direct measurement of NH3 is not available, the controller will
have to rely on the observed state 2,. The observer design was
introduced earlier.
100 200 300 400 500 600
In order to evaluate the controller performance, Time [secs]
experimental data for bag 3 of the FTP cycle were used, of Figure 6. Catalyst response under closed loop control
which the vehicle velocity profile is shown in Figure 10.
[Scheme 1].
Figure 6 shows the closed loop response of the plant for the
given NO~ inlet concentration profile, (experimental data fi'om
FTP bag 3). The catalyst (model) does not have any activity
6 6 Copyright
Copyright©©2002 byby
#### ASME
ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 01/27/2018 Terms of Use: http://www.asme.org/about-asme/terms-of-use
Surface Coverage Conve'sionEfficiencyComparison
. . . . • .... 1 i ]
I I
0.9
~,I00
90
"" 0.8
Schemet
80 I
I:: 0.7 "+" Soheme2
o (
,0 +)L/t
m
L-
E
@
>
0.6
0.5
0.4
v
]
J
J
l ~o
4o
[+,
o Q
03
0.2
0.1
,. __
+,,~
I
I
J!loop upto 200 deg C
=~
~
- - scheme 1
J
.... Scheme 2
I _ . _ _ ~ _ _
°° 3o
10
01
t+0+ i
I I I I
100 200 300 400 500 600 100 200 300 400 500 600
Time lsecsl 1ime [sees]
Figure 9. Comparison of conversion efficiencies fox" the two
control schemes.
Figure 7. Surt~ce coverage response for the two control
schemes.
V e l o c i t y p r o f i l e f o r FTP bag 3
Ammnia Slip cmnparison ...... _ = _
0.09 - - i i i i
100
- - Scheme I
- ~ Scheme2 90
0.08
80
0.0l
'~' 0.06
70 i
60
= O,O5
O
50
0
0.04
~J
:~ 40
o.o3
0.02
051
+++
++° it : :
1o
ol. ---
:
0 -J~ I I I
0 1 O0 200 300 400 500 600
0 1110 200 300 400 500 G00
Time [sees] TiTme [secs]
Figure 8. Comparison of Ammonia slip behavior for the two
Figure 10. Vehicle velocity profile for Bag 3 of the FTP cycle.
control schemes.
7 Copyright © 2002 by ASME
7 Copyright © #### by ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 01/27/2018 Terms of Use: http://www.asme.org/about-asme/terms-of-use
CONCLUSIONS
In this paper we tackle the Urea-SCR control problem for
non-stationary applications. The control design is based on
gaseous ammonia being available instantaneously as the input
variable. This marks a departure fi'om real life situations where
the input is aqueous urea. The conversion of the aqueous urea
to gaseous ammonia is a two-step chemical reaction and needs
to be addressed separately. Results from Controllability and
Observability analysis are interesting and have very realistic
explanations. The basic catalyst behavior under control
influence is also illustrated via response surfaces. An observer
design for the surface coverage fraction is presented. Control
design is implemented in the Sliding Mode framework and
illustrates an application of the so called Regular Form. A new
definition of conversion efficiency was given that takes into
account both NOx conversion and ammonia slip. This
definition was shown to have a natural connection with sliding
mode control in that it defines an appropriate sliding surface.
This connection was exploited in a sliding mode controller
design of which simulation results are included. Further results
will include the urea to gas phase ammonia dynamics while
concentrating on optimal control policies for urea dosage.
BIBLIOGRAPHY
1. D. Upadhyay and M. van Nieuwstadt, "Lumped Parameter
Model of a SCR Catalyst for Urea control," submitted
ASME, IMECE, 2002, New Orleans.
2. V. Utkin, J. Guldner and J. Shi, " Sliding Mode Control in
Eleetromechanical Systems," Taylor and Francis, 1999.
3. V. Utkin, "Sliding Modes in Control Optimization,"
Springer Verlag, 1992, USA.
4. L. Lietti, 1. Nova, E. Tronconi and P. Forzatti, "Transient
kinetic study of the SCR-DeNOx reaction," Catalysis
Today, 45 (1998), 85-92.
8 8 Copyright
Copyright© 2002 by ASME
© #### by ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 01/27/2018 Terms of Use: http://www.asme.org/about-asme/terms-of-use
Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- PR Earth Users Guide EMILY1Документ2 страницыPR Earth Users Guide EMILY1Azim AbdoolОценок пока нет
- Nature of Science-Worksheet - The Amoeba Sisters HWДокумент2 страницыNature of Science-Worksheet - The Amoeba Sisters HWTiara Daniel25% (4)
- AE8404 Propulsion-I QBДокумент9 страницAE8404 Propulsion-I QBMoses DevaprasannaОценок пока нет
- Ae8301 Aetd QBДокумент22 страницыAe8301 Aetd QBMoses DevaprasannaОценок пока нет
- CFD Analysis of NH3 Based SCR After Treatment SystemДокумент5 страницCFD Analysis of NH3 Based SCR After Treatment SystemMoses DevaprasannaОценок пока нет
- Microsoft PowerPoint - OPERATING PRINCIPLE OF AIRCRAFT PISTON ENGINEДокумент28 страницMicrosoft PowerPoint - OPERATING PRINCIPLE OF AIRCRAFT PISTON ENGINEMoses DevaprasannaОценок пока нет
- Turbulence ModelingДокумент10 страницTurbulence ModelingMoses DevaprasannaОценок пока нет
- Methods For Unstructured Grid GenerationДокумент12 страницMethods For Unstructured Grid GenerationMoses DevaprasannaОценок пока нет
- Cost and Fuel Efficient SCR-only Solution For Post-2010 HD Emission StandardsДокумент8 страницCost and Fuel Efficient SCR-only Solution For Post-2010 HD Emission StandardsMoses DevaprasannaОценок пока нет
- Catalysts: Mechanistic Investigation of The Reduction of NO Over Pt-And Rh-Based LNT CatalystsДокумент14 страницCatalysts: Mechanistic Investigation of The Reduction of NO Over Pt-And Rh-Based LNT CatalystsMoses DevaprasannaОценок пока нет
- A Reconfigurable Wing For Biomimetic AircraftДокумент12 страницA Reconfigurable Wing For Biomimetic AircraftMoses DevaprasannaОценок пока нет
- AvionicsДокумент57 страницAvionicsMoses Devaprasanna100% (1)
- Moire TechniqueДокумент15 страницMoire TechniqueMoses DevaprasannaОценок пока нет
- Aerodynamic Analysis of Dimple Effect On Aircraft WingДокумент4 страницыAerodynamic Analysis of Dimple Effect On Aircraft WingMoses DevaprasannaОценок пока нет
- A CFD Based Numerical Analysis of Scramjet CombustorДокумент4 страницыA CFD Based Numerical Analysis of Scramjet CombustorMoses DevaprasannaОценок пока нет
- Hypersonic Airbreathing PropulsionДокумент41 страницаHypersonic Airbreathing PropulsionMoses DevaprasannaОценок пока нет
- APA Citation Method For ERLACS: Reference Citations in TextДокумент8 страницAPA Citation Method For ERLACS: Reference Citations in Textdanny_alfaro_8Оценок пока нет
- Ariba Collaborative Sourcing ProfessionalДокумент2 страницыAriba Collaborative Sourcing Professionalericofx530Оценок пока нет
- English For General SciencesДокумент47 страницEnglish For General Sciencesfauzan ramadhanОценок пока нет
- Cosmic Handbook PreviewДокумент9 страницCosmic Handbook PreviewnkjkjkjОценок пока нет
- VLT 6000 HVAC Introduction To HVAC: MG.60.C7.02 - VLT Is A Registered Danfoss TrademarkДокумент27 страницVLT 6000 HVAC Introduction To HVAC: MG.60.C7.02 - VLT Is A Registered Danfoss TrademarkSamir SabicОценок пока нет
- Introduction To AmplifierДокумент8 страницIntroduction To AmplifierElaine BicolОценок пока нет
- The History of Music in Portugal - Owen ReesДокумент4 страницыThe History of Music in Portugal - Owen ReeseugenioamorimОценок пока нет
- Introduction To Designing An Active Directory InfrastructureДокумент18 страницIntroduction To Designing An Active Directory InfrastructurepablodoeОценок пока нет
- Friday 25 Mar 12:15 AM Friday 25 Mar 5:30 AM: Emirates CGK DXBДокумент3 страницыFriday 25 Mar 12:15 AM Friday 25 Mar 5:30 AM: Emirates CGK DXBDONI ARTAОценок пока нет
- Revised Corporation Code - Non Stock Close and Special CorporationsДокумент19 страницRevised Corporation Code - Non Stock Close and Special CorporationsVenziel PedrosaОценок пока нет
- Atom SDДокумент5 страницAtom SDatomsa shiferaОценок пока нет
- Maharashtra State Board 9th STD History and Political Science Textbook EngДокумент106 страницMaharashtra State Board 9th STD History and Political Science Textbook EngSomesh Kamad100% (2)
- 7 ElevenДокумент80 страниц7 ElevenakashОценок пока нет
- GA Power Capsule For SBI Clerk Mains 2024 (Part-2)Документ82 страницыGA Power Capsule For SBI Clerk Mains 2024 (Part-2)aa1904bbОценок пока нет
- Case Study On Goodearth Financial Services LTDДокумент15 страницCase Study On Goodearth Financial Services LTDEkta Luciferisious Sharma0% (1)
- Strategic Capital Management: Group - 4 Jahnvi Jethanandini Shreyasi Halder Siddhartha Bayye Sweta SarojДокумент5 страницStrategic Capital Management: Group - 4 Jahnvi Jethanandini Shreyasi Halder Siddhartha Bayye Sweta SarojSwetaSarojОценок пока нет
- EmployWise JAVA ASSIGNMENTДокумент2 страницыEmployWise JAVA ASSIGNMENTPreet PatelОценок пока нет
- Anviz T5 RFID ManualДокумент52 страницыAnviz T5 RFID ManualLuis Felipe Olaya SandovalОценок пока нет
- Parker HPD Product Bulletin (HY28-2673-01)Документ162 страницыParker HPD Product Bulletin (HY28-2673-01)helden50229881Оценок пока нет
- Flowrox Valve Solutions Catalogue E-VersionДокумент16 страницFlowrox Valve Solutions Catalogue E-Versionjavier alvarezОценок пока нет
- Negative Feedback AmplifierДокумент31 страницаNegative Feedback AmplifierPepОценок пока нет
- TAC42055 - HO01 Edition I2.0: Section 1 Module 1 Page 1Документ69 страницTAC42055 - HO01 Edition I2.0: Section 1 Module 1 Page 1matheus santosОценок пока нет
- Helipal Tbs Powercube ManualДокумент29 страницHelipal Tbs Powercube Manualoualid zouggarОценок пока нет
- Slides - SARSДокумент191 страницаSlides - SARSCedric PoolОценок пока нет
- Heart Rate Variability Threshold As An Alternative.25Документ6 страницHeart Rate Variability Threshold As An Alternative.25Wasly SilvaОценок пока нет
- Furnace Temperature & PCE ConesДокумент3 страницыFurnace Temperature & PCE ConesAbdullrahman Alzahrani100% (1)
- AAR Shell ProgrammingДокумент13 страницAAR Shell ProgrammingMarimuthu MuthaiyanОценок пока нет
- BSDДокумент26 страницBSDEunnicePanaliganОценок пока нет