Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Truefire Guitar Chord Cookbook PDFДокумент101 страницаTruefire Guitar Chord Cookbook PDFeuripides7794% (17)
- Completation Inteligent RevistaДокумент9 страницCompletation Inteligent RevistaGabriel Castellon HinojosaОценок пока нет
- Gree Dehumidifier Service ManualДокумент58 страницGree Dehumidifier Service Manualjdv1234Оценок пока нет
- Datasheet Cpu 416-2Документ13 страницDatasheet Cpu 416-2Danu MaldinoОценок пока нет
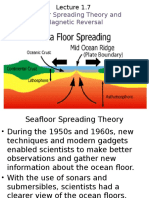
- Seafloor Spreading TheoryДокумент16 страницSeafloor Spreading TheoryMark Anthony Evangelista Cabrieto100% (1)
- An Empirical Study On The Nexus Between The Emotional Intelligence of Top Managers and Their Assessment of Intellectual CapitalДокумент30 страницAn Empirical Study On The Nexus Between The Emotional Intelligence of Top Managers and Their Assessment of Intellectual Capitalmaher76Оценок пока нет
- Training Cases: SimaticДокумент11 страницTraining Cases: SimaticKatty MenaОценок пока нет
- Shape and Volume: A Presentation On AcousticsДокумент35 страницShape and Volume: A Presentation On AcousticsSiddharth BhandariОценок пока нет
- Pump Station System Curves Session 1Документ29 страницPump Station System Curves Session 1Toan LeОценок пока нет
- A Generic Circular BufferДокумент3 страницыA Generic Circular BufferSatish KumarОценок пока нет
- Dead and Live LoadДокумент5 страницDead and Live LoadBhuwesh PantОценок пока нет
- BQ 76 PL 102Документ23 страницыBQ 76 PL 102AlexОценок пока нет
- Model 793.00 System SoftwareДокумент750 страницModel 793.00 System SoftwareMichel Zarzosa RojasОценок пока нет
- Dish Washer Mcachine ProjectДокумент43 страницыDish Washer Mcachine ProjectVijay Powar60% (5)
- TF100-9D - Refrigerant Hose With Att FittingsДокумент28 страницTF100-9D - Refrigerant Hose With Att FittingsJai BhandariОценок пока нет
- Susan Abed (2012) - Corporate Governance and Earnings Management Jordanian EvidenceДокумент10 страницSusan Abed (2012) - Corporate Governance and Earnings Management Jordanian Evidenceheryp123Оценок пока нет
- Digital Signal ProcessingДокумент6 страницDigital Signal Processing5adjcourt allagaddaОценок пока нет
- Open Mapping Theorem (Functional Analysis)Документ3 страницыOpen Mapping Theorem (Functional Analysis)Silambu SilambarasanОценок пока нет
- Module 2 Notes - PSOCДокумент24 страницыModule 2 Notes - PSOCpriyaОценок пока нет
- Astm B695-04-2009Документ6 страницAstm B695-04-2009Danny TriwibowoОценок пока нет
- List of IEC StandardsДокумент12 страницList of IEC Standardsaravindeee08100% (1)
- Maquinaria Forestal..Документ14 страницMaquinaria Forestal..Juan G ContrerasОценок пока нет
- Aloe (Aloe Barbadensis Miller) Gel As An Agent in Delaying The Physical DETERIORATION OF EGGPLANT (Solanum Melongena), TOMATO (LycopersicumДокумент20 страницAloe (Aloe Barbadensis Miller) Gel As An Agent in Delaying The Physical DETERIORATION OF EGGPLANT (Solanum Melongena), TOMATO (LycopersicumCyrus BautistaОценок пока нет
- Parola A Do ZДокумент8 страницParola A Do ZjovicaradОценок пока нет
- Calibration Procedure On ML-D5, D6 (ZERO-SPAN Adjustment)Документ2 страницыCalibration Procedure On ML-D5, D6 (ZERO-SPAN Adjustment)Haytham RedaОценок пока нет
- Chapter 1 - Distillation PDFДокумент107 страницChapter 1 - Distillation PDFFatin Natasha NazriОценок пока нет
- Arthashastra: Citation NeededДокумент4 страницыArthashastra: Citation NeededtusharОценок пока нет
- Simultaneous Equations - Word ProblemsДокумент27 страницSimultaneous Equations - Word ProblemsSandy Wong0% (1)
- Humiseal 1C49Lv Silicone Conformal Coating Technical Data SheetДокумент2 страницыHumiseal 1C49Lv Silicone Conformal Coating Technical Data Sheetmario230991Оценок пока нет
- Abb Sattcon ComliДокумент17 страницAbb Sattcon Comlilgrome73Оценок пока нет