Вам также может понравиться
- Re10460 PDFДокумент20 страницRe10460 PDFINVESTIGACION Y DESARROLLOОценок пока нет
- Power Control Unit, Hydraulic - SizingДокумент4 страницыPower Control Unit, Hydraulic - SizingdodoNiyo100% (1)
- Ib SL Physics Syllabus 2014-2015Документ5 страницIb SL Physics Syllabus 2014-2015api-276883898Оценок пока нет
- 15K Tube Cleaning NozzlesДокумент39 страниц15K Tube Cleaning NozzlesAlfred Hernandez Mendoza100% (1)
- Steel EnglishДокумент12 страницSteel EnglishkfctcoОценок пока нет
- Technical Overview and Specification Summary Ps 00232 Data PDFДокумент24 страницыTechnical Overview and Specification Summary Ps 00232 Data PDFmmilovanmОценок пока нет
- FBS-CMGSM Users Manual en v1-26Документ6 страницFBS-CMGSM Users Manual en v1-26naveedengineerОценок пока нет
- TSE - VGA Final Project Report - Using Arduino and GameduinoДокумент65 страницTSE - VGA Final Project Report - Using Arduino and GameduinoZahidur Ovi RahmanОценок пока нет
- HydraulicPowerUnit PowerTransmissionДокумент4 страницыHydraulicPowerUnit PowerTransmissionCesar Ruben SosaОценок пока нет
- RTC Based - Automatic College BellДокумент53 страницыRTC Based - Automatic College BellPgc VnbОценок пока нет
- Stoerk 2004 enДокумент199 страницStoerk 2004 enSousaFVОценок пока нет
- Simulationandmodelingofahydraulicsystem Fluidsim Oronjak PDFДокумент5 страницSimulationandmodelingofahydraulicsystem Fluidsim Oronjak PDFHadi NurhidayatОценок пока нет
- Course Outline PhysicsДокумент4 страницыCourse Outline PhysicsvimalОценок пока нет
- Transducer Basics ModifiedДокумент78 страницTransducer Basics ModifiedAmit RegeОценок пока нет
- IB Physics 2 Assess WSE2Документ3 страницыIB Physics 2 Assess WSE2Abhijeet GawandeОценок пока нет
- Easyport Usb Example Applications enДокумент1 страницаEasyport Usb Example Applications enAlan Rizky BerliantoОценок пока нет
- Pipe and Pipe Fittings in Hydraulic SystemДокумент11 страницPipe and Pipe Fittings in Hydraulic SystemAaryan PawarОценок пока нет
- Electro-Pneumatics: Module EP-5: Sensors in Electro-Pneumatics (Proximity Switches and Pressure Switches)Документ36 страницElectro-Pneumatics: Module EP-5: Sensors in Electro-Pneumatics (Proximity Switches and Pressure Switches)Joesun LizardoОценок пока нет
- ShimanoДокумент1 страницаShimanoProto Popescu VictorОценок пока нет
- Study Guide Heavy Duty Equipment Technician: Department of Advanced Education, Skills and LabourДокумент29 страницStudy Guide Heavy Duty Equipment Technician: Department of Advanced Education, Skills and LabourKai FebОценок пока нет
- Re 10460Документ20 страницRe 10460Ahmed Abd ElhakeemОценок пока нет
- Solenoid Lab ManualДокумент17 страницSolenoid Lab Manualbrandon999Оценок пока нет
- Magnetic Proximity SwitchДокумент9 страницMagnetic Proximity SwitchSagar ChachondiaОценок пока нет
- Robotic Sensors: Robot Actuators - Different TypesДокумент4 страницыRobotic Sensors: Robot Actuators - Different Typesmohan_rapaka100% (1)
- Extra Exercise Pneumatics Sequence CircuitДокумент1 страницаExtra Exercise Pneumatics Sequence CircuitJ.m.MoraОценок пока нет
- Rotan Internal Gear Pumps: Desmi IncДокумент14 страницRotan Internal Gear Pumps: Desmi IncVijay BhureОценок пока нет
- L2-3 - M3 Electrotech - Physics - EN PDFДокумент12 страницL2-3 - M3 Electrotech - Physics - EN PDFAnnemarija KalninaОценок пока нет
- Electrical Machines BookДокумент263 страницыElectrical Machines BookYo Molo MazoОценок пока нет
- Chapter 5 Pneumatic and Hydraulic Actuation SystemsДокумент22 страницыChapter 5 Pneumatic and Hydraulic Actuation SystemsMukhammad FauzyОценок пока нет
- Experiment 01 The Hydraulic Bench PDFДокумент2 страницыExperiment 01 The Hydraulic Bench PDFAzooОценок пока нет
- S4CPlus-Rapid Reference 4.0.80Документ808 страницS4CPlus-Rapid Reference 4.0.80martinimartiiniОценок пока нет
- 2020-MC-274 System 2Документ17 страниц2020-MC-274 System 2David James100% (1)
- Door Knock Alarm PPT.2Документ11 страницDoor Knock Alarm PPT.2ChandhuОценок пока нет
- LVDT - & - Accelerometer MeasurementsДокумент6 страницLVDT - & - Accelerometer MeasurementsAnand RajОценок пока нет
- PID Motor Control: Presented by Bo ChiassonДокумент85 страницPID Motor Control: Presented by Bo ChiassonkОценок пока нет
- Lab Manual-H & P-1me2603Документ40 страницLab Manual-H & P-1me2603Hi helloОценок пока нет
- Azipod XO: The New Generation Azipod Takes Podded Propulsion To A New LevelДокумент6 страницAzipod XO: The New Generation Azipod Takes Podded Propulsion To A New LevelMaricel Hincu100% (1)
- IB Physics SL Lab Report - Specific Heat CapacityДокумент15 страницIB Physics SL Lab Report - Specific Heat CapacitySebastián González75% (4)
- Hand Tools in BenchworkДокумент4 страницыHand Tools in BenchworkmarkvillaplazaОценок пока нет
- Table of MaterialsДокумент28 страницTable of MaterialsMilos KosticОценок пока нет
- 15-Step Digital Power SupplyДокумент2 страницы15-Step Digital Power SupplyTijana FilipovicОценок пока нет
- CH 21 AnswersДокумент26 страницCH 21 AnswersArjav DesaiОценок пока нет
- Bottle Filling ApplicationДокумент25 страницBottle Filling ApplicationPriya Dongre100% (2)
- Pneumatic Note UNIT 4Документ12 страницPneumatic Note UNIT 4Syazrin Aklili Ab RahmanОценок пока нет
- Bottle Filling SystemДокумент6 страницBottle Filling Systempushkararora33% (3)
- Unit 2 - Hydraulic Actuators and MotorsДокумент38 страницUnit 2 - Hydraulic Actuators and MotorsAnirudh SrinivasОценок пока нет
- Fan Starting TorqueДокумент4 страницыFan Starting Torquehardik033Оценок пока нет
- Sensors and Data Acquisition: Radar GunДокумент91 страницаSensors and Data Acquisition: Radar GunBurak Bildirici100% (1)
- Hydraulic and Pneumatic SystemsДокумент59 страницHydraulic and Pneumatic Systemsviahul100% (1)
- Automatic Bottle Filling System Using PLC Conveyor ModelaДокумент71 страницаAutomatic Bottle Filling System Using PLC Conveyor ModelaParag RekhiОценок пока нет
- Fluid CircuitsДокумент189 страницFluid CircuitsM.Saravana Kumar..M.E100% (1)
- Spool Type Solenoid ValveДокумент28 страницSpool Type Solenoid ValveSiva Pratap VОценок пока нет
- System For Water Level & Flow Regulation by PID: Products 2 Years GuaranteeДокумент33 страницыSystem For Water Level & Flow Regulation by PID: Products 2 Years GuaranteeAugusto CamposОценок пока нет
- Dynamic Analysis of Hydraulic DrivesДокумент50 страницDynamic Analysis of Hydraulic DrivesAnonymous Hy5Ir9QXОценок пока нет
- ContentsДокумент21 страницаContentsEng-Mohammed SalemОценок пока нет
- UNIT 5 - Special MachinesДокумент33 страницыUNIT 5 - Special MachinesKapilachander ThangavelОценок пока нет
- EE6504-Electrical Machines - II-1330526698-Em II Unit 5Документ30 страницEE6504-Electrical Machines - II-1330526698-Em II Unit 5AnkurОценок пока нет
- Induction Motor - Double Field Revolving Theory - Universal MotorДокумент24 страницыInduction Motor - Double Field Revolving Theory - Universal MotorSree ShobhaОценок пока нет
- Single Phase MotorsДокумент24 страницыSingle Phase Motorssnh.2k19Оценок пока нет
- Auto Transformer StarterДокумент46 страницAuto Transformer StarterSarthak MishraОценок пока нет
- First 2-3 Words of Title 1Документ13 страницFirst 2-3 Words of Title 1Cherise GladneyОценок пока нет
- Opening - Closing Schedule - FA21Документ56 страницOpening - Closing Schedule - FA21Ngọc LannОценок пока нет
- Health Research Poster ContestДокумент15 страницHealth Research Poster ContestJed BellenОценок пока нет
- PLC FlowchartДокумент16 страницPLC FlowchartChristian BaldonadoОценок пока нет
- 21st Century (Reflection)Документ2 страницы21st Century (Reflection)Larie CanoОценок пока нет
- Calibre Fundamentals Performing DRC Lvs - 063568Документ18 страницCalibre Fundamentals Performing DRC Lvs - 063568Kumar KumarОценок пока нет
- Beapr635 inДокумент2 страницыBeapr635 inluis andre tapia cruzОценок пока нет
- Lecture 1 Chap 1-NavatheДокумент18 страницLecture 1 Chap 1-NavatheRajni_Pathania_1874Оценок пока нет
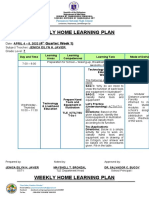
- Weekly Home Learning Plan: (4 Quarter: Week 1)Документ8 страницWeekly Home Learning Plan: (4 Quarter: Week 1)JenicaEilynОценок пока нет
- Coding Form Data SiswaДокумент5 страницCoding Form Data SiswaVicky SplitfireОценок пока нет
- Ooad Important QuestionsДокумент41 страницаOoad Important QuestionsVenkatesh Rajaram0% (1)
- Measure in Inch and CMДокумент1 страницаMeasure in Inch and CMIrena Agatha SimanjuntakОценок пока нет
- B41-R4 Mathmatics and StaticsДокумент12 страницB41-R4 Mathmatics and StaticsAYUSH PRADHANОценок пока нет
- Jahanzeb Mirza - LomДокумент2 страницыJahanzeb Mirza - LomZain HaiderОценок пока нет
- Experience The Excitement of Discovery: X-TERRA 505 X-TERRA 705Документ2 страницыExperience The Excitement of Discovery: X-TERRA 505 X-TERRA 705Inform7105Оценок пока нет
- Solution For Problem Statement 3 - WhatsApp PayДокумент7 страницSolution For Problem Statement 3 - WhatsApp PayManik ManchandaОценок пока нет
- Construir Moto ChopperДокумент7 страницConstruir Moto ChopperAngel Dure100% (2)
- SAP Credit Management User ManualДокумент39 страницSAP Credit Management User Manualsuva61750% (2)
- Sumo User Manual PDFДокумент48 страницSumo User Manual PDFАндрейОценок пока нет
- Paper 9007Документ11 страницPaper 9007IJARSCT JournalОценок пока нет
- Lecture 5. Industry 4.0 Technologies and Enterprise ArchitectureДокумент13 страницLecture 5. Industry 4.0 Technologies and Enterprise ArchitectureBobo SevenОценок пока нет
- Plant Enginerring ManagementДокумент4 страницыPlant Enginerring ManagementTHEOPHILUS ATO FLETCHERОценок пока нет
- TM-1861 AVEVA Administration (1.4) System Administration Rev 1.0Документ106 страницTM-1861 AVEVA Administration (1.4) System Administration Rev 1.0praveen jangir100% (2)
- Forte III Spec Sheet v061Документ1 страницаForte III Spec Sheet v061Kenny SharpensteenОценок пока нет
- Thesis Proposal About ElectronicsДокумент6 страницThesis Proposal About Electronicsdnpqamfd100% (2)
- TS Software Operation Instructions Ver1.1Документ58 страницTS Software Operation Instructions Ver1.1Tri MurdaniОценок пока нет
- Caterpillar Cs 551 Cs 553 CP 553 Parts ManualДокумент23 страницыCaterpillar Cs 551 Cs 553 CP 553 Parts Manualzugenkzz33% (3)
- The Evolving Role of The Chief Growth OfficerДокумент8 страницThe Evolving Role of The Chief Growth OfficerhelloОценок пока нет
- Topic 1Документ6 страницTopic 1Linesh 2021Оценок пока нет
- LiuGong O E M Parts ListДокумент64 страницыLiuGong O E M Parts ListChristian VicenteОценок пока нет