Вам также может понравиться
- 9661 VUHF Ground Radio Family 6137Документ2 страницы9661 VUHF Ground Radio Family 6137riyanto_fisika55350% (1)
- VUHF HandheldДокумент2 страницыVUHF Handheldriyanto_fisika5535Оценок пока нет
- Pres-A1 Comms TutorialДокумент51 страницаPres-A1 Comms TutorialMashudi AliОценок пока нет
- Exact FFT MeasurementsДокумент10 страницExact FFT MeasurementsThomas GeorgeОценок пока нет
- VUHF Handheld PRC-5333Документ2 страницыVUHF Handheld PRC-5333riyanto_fisika55350% (1)
- OEP Home transformer manufacturersДокумент2 страницыOEP Home transformer manufacturersriyanto_fisika5535Оценок пока нет
- IC-M700PRO ENG 3aДокумент28 страницIC-M700PRO ENG 3aRoyal Revolt 01Оценок пока нет
- VUHF Handheld PRC-5433Документ2 страницыVUHF Handheld PRC-5433riyanto_fisika5535Оценок пока нет
- Open Street Map Data 180313 PDFДокумент44 страницыOpen Street Map Data 180313 PDFriyanto_fisika5535Оценок пока нет
- Agilent N9320A Spectrum Analyzer: Technical OverviewДокумент12 страницAgilent N9320A Spectrum Analyzer: Technical Overviewriyanto_fisika5535Оценок пока нет
- TMS320VC5509A DSP Starter Kit (DSK) :: ActiveДокумент1 страницаTMS320VC5509A DSP Starter Kit (DSK) :: Activeriyanto_fisika5535Оценок пока нет
- Tms 320 C 6748Документ274 страницыTms 320 C 6748riyanto_fisika5535Оценок пока нет
- The Art of Error Correcting Coding Robert H. Morelos-Zaragoza Second Edition, John Wiley & Sons, 2006 ISBN: 0470015586Документ2 страницыThe Art of Error Correcting Coding Robert H. Morelos-Zaragoza Second Edition, John Wiley & Sons, 2006 ISBN: 0470015586GogiGautamaAlHadiidОценок пока нет
- Test Equipment Solutions DatasheetДокумент9 страницTest Equipment Solutions Datasheetriyanto_fisika5535Оценок пока нет
- Sky13374-397Lf: 300 KHZ To 6.0 GHZ SPDT Switch: ApplicationsДокумент9 страницSky13374-397Lf: 300 KHZ To 6.0 GHZ SPDT Switch: Applicationsriyanto_fisika5535Оценок пока нет
- HackRF One Tutorial - F2017 - Report PDFДокумент34 страницыHackRF One Tutorial - F2017 - Report PDFSami UllahОценок пока нет
- Propagation Planning For Dxpeditions: 6 Steps For A More Successful TripДокумент9 страницPropagation Planning For Dxpeditions: 6 Steps For A More Successful Tripriyanto_fisika5535Оценок пока нет
- Audio Transformers ChapterДокумент30 страницAudio Transformers Chapterforing100% (4)
- Audio Transformers ChapterДокумент30 страницAudio Transformers Chapterforing100% (4)
- FLDIGI ConfigДокумент4 страницыFLDIGI Configriyanto_fisika5535Оценок пока нет
- IC-M700pro Instruction ManualДокумент28 страницIC-M700pro Instruction ManualSanjay NarayanОценок пока нет
- Fldigi: 1. Beginners' Questions Answered 1.1. What Is Fldigi?Документ9 страницFldigi: 1. Beginners' Questions Answered 1.1. What Is Fldigi?riyanto_fisika5535Оценок пока нет
- C55 DSPДокумент19 страницC55 DSPriyanto_fisika5535Оценок пока нет
- Pres-A1 Comms TutorialДокумент51 страницаPres-A1 Comms TutorialMashudi AliОценок пока нет
- LM567x Tone Decoder: 1 Features 3 DescriptionДокумент29 страницLM567x Tone Decoder: 1 Features 3 Descriptionriyanto_fisika5535Оценок пока нет
- 2N7002 PDFДокумент5 страниц2N7002 PDFriyanto_fisika5535Оценок пока нет
- .Документ522 страницы.riyanto_fisika5535Оценок пока нет
- IC-M700pro Instruction ManualДокумент28 страницIC-M700pro Instruction ManualSanjay NarayanОценок пока нет
- 2N7002 PDFДокумент5 страниц2N7002 PDFriyanto_fisika5535Оценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Mark Java ResumeДокумент4 страницыMark Java ResumesravanpaulОценок пока нет
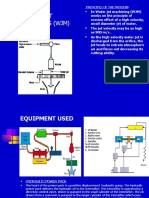
- Water Jet Machining (WJM) : Principle of The ProcessДокумент30 страницWater Jet Machining (WJM) : Principle of The ProcessMr Yasin Mech StaffОценок пока нет
- EN Operating Instructions VEGABAR 82 Two Wire 4 20 MaДокумент84 страницыEN Operating Instructions VEGABAR 82 Two Wire 4 20 MaHerick MoscardiniОценок пока нет
- U1 PDFДокумент20 страницU1 PDFFarah AlhamadОценок пока нет
- Evaluate a company's resources and competitivenessДокумент28 страницEvaluate a company's resources and competitivenessmahiОценок пока нет
- Name - Date - GroupДокумент2 страницыName - Date - GroupAlberto Recio GimenezОценок пока нет
- CHAPTER 2 Excel IntroductionДокумент21 страницаCHAPTER 2 Excel Introductionnatasha thaiОценок пока нет
- Source Code Algoritma BFSДокумент3 страницыSource Code Algoritma BFSMaster Of NothingОценок пока нет
- POLYCAB - MV Power Cable IEC 60502 2Документ32 страницыPOLYCAB - MV Power Cable IEC 60502 2AmitabhaОценок пока нет
- Ultrasound Designed To Fit Your Application: Logiq C3 PremiumДокумент2 страницыUltrasound Designed To Fit Your Application: Logiq C3 PremiumRSUD SangkulirangОценок пока нет
- CL207Course GuideДокумент614 страницCL207Course GuideedenfrayОценок пока нет
- B727 - 200 Load & Trim Sheet: For Exam Purposes Only!Документ1 страницаB727 - 200 Load & Trim Sheet: For Exam Purposes Only!AMOSОценок пока нет
- CompleteINFLUENCE OF INFORMATION AND COMMUNICATION TECHNOLOGY ON TEACHING AND LEARNING OF CHEMISTRY IN SENIOR SECONDARY SCHOOL IN OYO EAST LOCAL GOVERNMENT OF OYO STATEДокумент55 страницCompleteINFLUENCE OF INFORMATION AND COMMUNICATION TECHNOLOGY ON TEACHING AND LEARNING OF CHEMISTRY IN SENIOR SECONDARY SCHOOL IN OYO EAST LOCAL GOVERNMENT OF OYO STATEGIFTED PROJECTОценок пока нет
- Atex Reference Guide PDFДокумент2 страницыAtex Reference Guide PDFSrinivas KosuruОценок пока нет
- Fosroc Life Jacket-Formerly Galvashield LJДокумент2 страницыFosroc Life Jacket-Formerly Galvashield LJMansoor AliОценок пока нет
- Classless Inter-Domain Routing (CIDR) (192.168.100.0/29)Документ2 страницыClassless Inter-Domain Routing (CIDR) (192.168.100.0/29)MCTCOLTDОценок пока нет
- Gov Uscourts Paed 586669 1 0Документ38 страницGov Uscourts Paed 586669 1 0ForkLogОценок пока нет
- Virtualization: Hardware Virtualization Is Subdivided Into The Following TypesДокумент5 страницVirtualization: Hardware Virtualization Is Subdivided Into The Following TypesShweta YadavОценок пока нет
- Ethnography in UXDesignДокумент4 страницыEthnography in UXDesignVIVA-TECH IJRIОценок пока нет
- What Is File:: Chapter 4: Data File Handing (Part 1)Документ20 страницWhat Is File:: Chapter 4: Data File Handing (Part 1)Govind RathoreОценок пока нет
- Simplifying Ratios HomeworkДокумент6 страницSimplifying Ratios Homeworkafnambrcuzwdyk100% (1)
- 041157X99Z RE18318-20 CompressedДокумент2 страницы041157X99Z RE18318-20 CompressedmhasansharifiОценок пока нет
- Group 5 - Laboratory No. 5Документ14 страницGroup 5 - Laboratory No. 5Angel GonzalesОценок пока нет
- 01.4TB.076 Bus Duct Enclosure MaterialДокумент1 страница01.4TB.076 Bus Duct Enclosure MaterialJonathan FerueloОценок пока нет
- Laboratory Exercise No. 2-C Sieve Analysis and Abrasion Test of AggregatesДокумент4 страницыLaboratory Exercise No. 2-C Sieve Analysis and Abrasion Test of AggregatesHaziel DizonОценок пока нет
- Cambridge International AS & A Level: Information Technology 9626/04 May/June 2022Документ13 страницCambridge International AS & A Level: Information Technology 9626/04 May/June 2022Muhammad MuddassirОценок пока нет
- Iso 20000-1Документ4 страницыIso 20000-1Dr-MohamedLashinОценок пока нет
- Google Analytics Event Tracking GuideДокумент20 страницGoogle Analytics Event Tracking GuideagungbijaksanaОценок пока нет
- Harmonic Resonance During Energizing Primary Restorative Transmission SystemsДокумент14 страницHarmonic Resonance During Energizing Primary Restorative Transmission SystemsLuKas21cОценок пока нет
- Hyundai Part Catalogue D6ACДокумент157 страницHyundai Part Catalogue D6ACHammim Hamzhahh100% (1)