Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
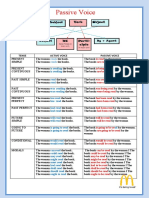
- Passive Voice Chart Classroom Posters Grammar Guides 114359Документ1 страницаPassive Voice Chart Classroom Posters Grammar Guides 114359M.ALIОценок пока нет
- Europass CV - Fresh GraduateДокумент1 страницаEuropass CV - Fresh GraduateM.ALIОценок пока нет
- Manual - Eng - MOE Smart ServicesДокумент5 страницManual - Eng - MOE Smart ServicesM.ALIОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- How To Apply Moe Uae enДокумент2 страницыHow To Apply Moe Uae enM.ALIОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- EquivalencyRequest HigherEducationOutsideUAE EnglishДокумент1 страницаEquivalencyRequest HigherEducationOutsideUAE EnglishM.ALIОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- (솔루션) Probability and Stochastic Processes 2nd Roy D. Yates and David J. Goodman 2판 확률과 통계 솔루션 433 4000Документ433 страницы(솔루션) Probability and Stochastic Processes 2nd Roy D. Yates and David J. Goodman 2판 확률과 통계 솔루션 433 4000Taeho Lee100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- MMM Chapter Wise Past Paper BiolДокумент13 страницMMM Chapter Wise Past Paper BiolM.ALIОценок пока нет
- Viscoelasticity 05 LaplaceДокумент7 страницViscoelasticity 05 LaplacealirezakhadirОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Continuation Methods For Non-Linear Analysis: FR: Méthodes de Pilotage Du ChargementДокумент32 страницыContinuation Methods For Non-Linear Analysis: FR: Méthodes de Pilotage Du ChargementStefano MilaniОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Caotic Mechanics MaximaДокумент25 страницCaotic Mechanics MaximaStefano MilaniОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Practice QuestionsДокумент2 страницыPractice QuestionsSamiraTJBAОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Quadratic Functions. Non-Linear Demand and Supply FunctionsДокумент24 страницыQuadratic Functions. Non-Linear Demand and Supply FunctionsElvira Hernandez BenitoОценок пока нет
- 002 Applied Geostatistics For Reservoir Char-Halaman-27-61 PDFДокумент35 страниц002 Applied Geostatistics For Reservoir Char-Halaman-27-61 PDFLAILA PUTRI YANTI BATUBARAОценок пока нет
- How To Examine A Case Study - StrategiesДокумент7 страницHow To Examine A Case Study - StrategiesjdestavilloОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Arithmetic Mean PDFДокумент29 страницArithmetic Mean PDFDivya Gothi100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Forecasting: Daison Dayon Hernandez Lastimosa Magbutong NacarioДокумент46 страницForecasting: Daison Dayon Hernandez Lastimosa Magbutong NacarioKathleenSwiftОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Business AnalyticsДокумент17 страницBusiness AnalyticsAllan Lao R.Оценок пока нет
- EconometricsДокумент1 страницаEconometricsJessica SohОценок пока нет
- 1975 Lichtman - A General Theory of The Counterplan PDFДокумент11 страниц1975 Lichtman - A General Theory of The Counterplan PDFMatthew St-GermainОценок пока нет
- Computational Complexity of DSPДокумент12 страницComputational Complexity of DSPnazmulОценок пока нет
- Signals and SystemsДокумент3 страницыSignals and SystemsDeepthikattaОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- National University of Modern Languages Lahore Campus TopicДокумент5 страницNational University of Modern Languages Lahore Campus Topicmuhammad ahmadОценок пока нет
- Inverse Trigonometric FunctionsДокумент26 страницInverse Trigonometric Functionssanskarid94Оценок пока нет
- Parallelism of Statistics and Machine Learning & Logistic Regression Versus Random ForestДокумент72 страницыParallelism of Statistics and Machine Learning & Logistic Regression Versus Random Forestvdjohn100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Beeman's AlgorithmДокумент4 страницыBeeman's Algorithmvisamarinas6226Оценок пока нет
- JawapanДокумент114 страницJawapanrosana ayuhaОценок пока нет
- Programme: Doctor of Philosophy (PHD in Business Administration) : Term: Nbuc-Ph.D-Online Submission DeadlineДокумент11 страницProgramme: Doctor of Philosophy (PHD in Business Administration) : Term: Nbuc-Ph.D-Online Submission DeadlineYonn Me Me KyawОценок пока нет
- BArch 5th Semester Revised Syllabus 080920Документ11 страницBArch 5th Semester Revised Syllabus 080920Jitendra FarkadeОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Ma1103 6THW PDFДокумент13 страницMa1103 6THW PDFfakhri racingОценок пока нет
- 122 PGTRB Maths Unit 6 Study Material PDFДокумент8 страниц122 PGTRB Maths Unit 6 Study Material PDFkarunakaranОценок пока нет
- Data Analytics Certificate: Who Should Enroll Inside The ProgramДокумент2 страницыData Analytics Certificate: Who Should Enroll Inside The ProgramkhalilОценок пока нет
- MCДокумент45 страницMCsohaib ahmedОценок пока нет
- Black-Scholes ProjectДокумент16 страницBlack-Scholes ProjectJeff LeeОценок пока нет
- StatisticsДокумент21 страницаStatisticsArun Jyothi CОценок пока нет
- Chapter 5 Inner Product SpacesДокумент8 страницChapter 5 Inner Product SpacesSeipati NyamaneОценок пока нет
- Coefficient of Concurrent DeviationsДокумент2 страницыCoefficient of Concurrent DeviationsPolice station100% (1)
- Mdframed Example PstricksДокумент4 страницыMdframed Example PstricksMaria Jose de las mercedes Costa AzulОценок пока нет