Вам также может понравиться
- Triton-Powered Saw TableДокумент32 страницыTriton-Powered Saw Tableauger88Оценок пока нет
- Quick Hoops™ High Tunnel Bender: Instruction Manual For 9018Документ54 страницыQuick Hoops™ High Tunnel Bender: Instruction Manual For 9018glue2Оценок пока нет
- CNCinst SherlineДокумент72 страницыCNCinst SherlineDejan StalovicОценок пока нет
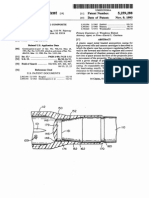
- United States Patent (191 (11) Patent Number: 5,259,288: Vatsvog (45) Date of Patent: Nov. 9, 1993Документ13 страницUnited States Patent (191 (11) Patent Number: 5,259,288: Vatsvog (45) Date of Patent: Nov. 9, 1993fghdfjerОценок пока нет
- X Axis Plate Front: DIY Modular CNC v2 Plates BДокумент5 страницX Axis Plate Front: DIY Modular CNC v2 Plates BDani HpОценок пока нет
- CNC Masine PrikazДокумент8 страницCNC Masine PrikazAnonymous hos8odОценок пока нет
- Indestructible Corner Clamp (Jig) For Welding ProjectsДокумент1 страницаIndestructible Corner Clamp (Jig) For Welding ProjectsTomas Tom MlОценок пока нет
- Construction Plans For Champion TLUD StoveДокумент18 страницConstruction Plans For Champion TLUD StoveRaymond KatabaziОценок пока нет
- Getting Started in CNCДокумент34 страницыGetting Started in CNCAndy1C1100% (1)
- Plans For Bench GrinderДокумент2 страницыPlans For Bench GrinderFernando Morocho100% (1)
- Chapter 3 - Bending Forming ShapingДокумент11 страницChapter 3 - Bending Forming ShapingFrigeri FrigeriОценок пока нет
- PluginTutorial V01Документ92 страницыPluginTutorial V01Vincenzo PaternòОценок пока нет
- 10 DIY Kettle BellДокумент7 страниц10 DIY Kettle BellcagedraptorОценок пока нет
- Electric Go Kart in Retro Style For KidsДокумент7 страницElectric Go Kart in Retro Style For KidsPaul MerrickОценок пока нет
- Build A Car: Karol Castañeda Deivy EspitiaДокумент4 страницыBuild A Car: Karol Castañeda Deivy Espitiakarol castañeda0% (1)
- 1954 South Bend RebuildДокумент182 страницы1954 South Bend RebuildAnonymous SBMnBCОценок пока нет
- Build A Generator From A Lawn Edger MotorДокумент13 страницBuild A Generator From A Lawn Edger Motorصفوان التلОценок пока нет
- Manual Raket85Документ20 страницManual Raket85Leandro BergamoОценок пока нет
- How To Make A BBQ BurnerДокумент14 страницHow To Make A BBQ Burnerfoobar100% (1)
- Shaft Drive Vs Chain DriveДокумент3 страницыShaft Drive Vs Chain DriveSubroto MukerjiОценок пока нет
- CIP ListeДокумент8 страницCIP ListeMaik MüllerОценок пока нет
- Building The Osborne PlatterДокумент9 страницBuilding The Osborne PlatterHeman Lee50% (2)
- Gyro Skipper PlansДокумент5 страницGyro Skipper PlansJayantha KandegamaОценок пока нет
- 3 PhaseДокумент9 страниц3 PhaseArnulfo LavaresОценок пока нет
- DiyДокумент12 страницDiyLornaLFryeОценок пока нет
- Mini Bike LightДокумент2 страницыMini Bike LightperacОценок пока нет
- User Manual For 2006 Fox Rear ShocksДокумент19 страницUser Manual For 2006 Fox Rear ShockssdjanusОценок пока нет
- Geodesic DomesДокумент6 страницGeodesic DomesMarc Angelo DavidОценок пока нет
- Maya Pedal Trailer BicicletaДокумент8 страницMaya Pedal Trailer BicicletaFran de VediaОценок пока нет
- How To Build Your Own Jet EngineДокумент14 страницHow To Build Your Own Jet Enginejoao carlosОценок пока нет
- Build Your Own Go Kart Chassis - Go Kart Frame Plans & MeasurementsДокумент15 страницBuild Your Own Go Kart Chassis - Go Kart Frame Plans & Measurementsandyroads2Оценок пока нет
- Reverse Electroplating of SilverДокумент2 страницыReverse Electroplating of SilverMohammad Umer AsgherОценок пока нет
- Bike RV Project by Alexander Main (2.0)Документ34 страницыBike RV Project by Alexander Main (2.0)magneticnorth100% (1)
- How To Make A Guitar Amp CheapДокумент6 страницHow To Make A Guitar Amp CheapMuluken BonoОценок пока нет
- Wildey Survival .45 WIN and .475 WILDEY Mag PistolДокумент6 страницWildey Survival .45 WIN and .475 WILDEY Mag PistolJon MorenoОценок пока нет
- Build Yourself A Portable Home A Mongolian YurtДокумент34 страницыBuild Yourself A Portable Home A Mongolian Yurtfwspark3868100% (3)
- High Power Rocket Motor Basics: Adapted From Rocket Chronicles Inc.'s Web SiteДокумент5 страницHigh Power Rocket Motor Basics: Adapted From Rocket Chronicles Inc.'s Web Sitepamos1111Оценок пока нет
- US6182619Документ11 страницUS6182619engine wang100% (1)
- Dutch Bucket Recovery SystemДокумент1 страницаDutch Bucket Recovery SystemDhanraj Patil100% (1)
- Classes of RotorcraftДокумент13 страницClasses of RotorcraftJohan M Syafi'iОценок пока нет
- Slotting MachineДокумент32 страницыSlotting Machinesanaashraf91% (11)
- Rotary Table Bill of Materials A: TitleДокумент12 страницRotary Table Bill of Materials A: TitleComan Cristian MihailОценок пока нет
- Parts Breakdown HP2070: Page 1 of 3 2/8/2008Документ3 страницыParts Breakdown HP2070: Page 1 of 3 2/8/2008Zaidu zamaan100% (1)
- Struck Dozers - CubCadetManДокумент4 страницыStruck Dozers - CubCadetManNaveen BansalОценок пока нет
- 9-Crossfire 150R Parts ManualДокумент40 страниц9-Crossfire 150R Parts ManualoakstrОценок пока нет
- How To Build A Rubber Band Heat EngineДокумент10 страницHow To Build A Rubber Band Heat Enginemarius_danila8736Оценок пока нет
- 15 Minutes 1 Hour 1 Hour 30 Minutes 10: Cream Puffs IДокумент1 страница15 Minutes 1 Hour 1 Hour 30 Minutes 10: Cream Puffs IThomas SjölingОценок пока нет
- Manual For Solar IcemakerДокумент7 страницManual For Solar Icemakersjdarkman1930Оценок пока нет
- Us 5596162Документ9 страницUs 5596162Stanley PinesОценок пока нет
- Carbine Receiver ExtensionsДокумент2 страницыCarbine Receiver Extensionsjordanbowles2579Оценок пока нет
- Muzzle Thread Sizes For Various FirearmsДокумент2 страницыMuzzle Thread Sizes For Various Firearmsrick55_55Оценок пока нет
- Functional Composite Materials: Manufacturing Technology and Experimental ApplicationОт EverandFunctional Composite Materials: Manufacturing Technology and Experimental ApplicationОценок пока нет
- Car Maintainer, Group B: Passbooks Study GuideОт EverandCar Maintainer, Group B: Passbooks Study GuideОценок пока нет
- A Tutorial On Battery Simulation - Matching Power Source To Electronic SystemДокумент11 страницA Tutorial On Battery Simulation - Matching Power Source To Electronic SystemRavi TejaОценок пока нет
- Wevj 06 00147Документ8 страницWevj 06 00147Yusuff MakindeОценок пока нет
- Simulink Test Bench Hybrid B-SДокумент4 страницыSimulink Test Bench Hybrid B-SRadoy CristyОценок пока нет
- How To Use PTC Thermistors As Current Protection - TDKДокумент4 страницыHow To Use PTC Thermistors As Current Protection - TDKJuan GaleanoОценок пока нет
- Tps 61200Документ35 страницTps 61200Juan GaleanoОценок пока нет
- ALD810026Документ6 страницALD810026Juan GaleanoОценок пока нет
- (Bounchaleun) AN ELEMENTARY INTRODUCTION TO FAST FOURIERДокумент12 страниц(Bounchaleun) AN ELEMENTARY INTRODUCTION TO FAST FOURIERJuan GaleanoОценок пока нет
- An5030 PDFДокумент20 страницAn5030 PDFCanh LuongtienОценок пока нет
- Synchronous Buck Converter For Charger of Electric Easy BikesДокумент5 страницSynchronous Buck Converter For Charger of Electric Easy BikesJuan GaleanoОценок пока нет
- Nfs 320 Intelligent Addressable Fire Alarm System ManualДокумент14 страницNfs 320 Intelligent Addressable Fire Alarm System ManualrafaelОценок пока нет
- Materials System SpecificationДокумент14 страницMaterials System SpecificationAnandan ramachandranОценок пока нет
- Design and Implementation of Vo - Nagwa F. Ibrahim, Sobhy S. DessДокумент131 страницаDesign and Implementation of Vo - Nagwa F. Ibrahim, Sobhy S. DessHuy Thông NguyễnОценок пока нет
- Aditya College of Engineering: B R E A K B R E A KДокумент6 страницAditya College of Engineering: B R E A K B R E A KDarshan BysaniОценок пока нет
- Micro StripДокумент12 страницMicro Stripnarico37Оценок пока нет
- Orgone Bioenergy and Radionic CircuitsДокумент3 страницыOrgone Bioenergy and Radionic CircuitsGiannis Fakiris92% (12)
- Obe Curriculum For The Course: RGPV (Diploma Wing) BhopalДокумент22 страницыObe Curriculum For The Course: RGPV (Diploma Wing) BhopalHarshit Sahu CS-26Оценок пока нет
- Leading The Way in Heavy Metals Analysis: Epsilon 5Документ16 страницLeading The Way in Heavy Metals Analysis: Epsilon 5tonyОценок пока нет
- ECE4371 Class9Документ34 страницыECE4371 Class9Satyasundar PanigrahiОценок пока нет
- 81.99198-5972 Wiring Diagrams K 90 (2nd Edition) TGA - EngДокумент684 страницы81.99198-5972 Wiring Diagrams K 90 (2nd Edition) TGA - EngVitek9100100% (1)
- CountersДокумент44 страницыCounterstaufiqridz100% (1)
- System/Battery Type Emerson Narada 12NDT100A Narada 12NDT180 Vision CT12 180XДокумент2 страницыSystem/Battery Type Emerson Narada 12NDT100A Narada 12NDT180 Vision CT12 180XBysОценок пока нет
- RK 49 - Ds - en PDFДокумент5 страницRK 49 - Ds - en PDFPedro Javier Castro SanchezОценок пока нет
- Alkan-GE OEC Elite II BVAS 9 Inches OfferДокумент6 страницAlkan-GE OEC Elite II BVAS 9 Inches Offerahmed_galal_waly1056Оценок пока нет
- Sizing and Terminal Configuration: Heavy-Duty Commercial Batteries Groups (12-Volt)Документ1 страницаSizing and Terminal Configuration: Heavy-Duty Commercial Batteries Groups (12-Volt)Abduallah MuhammadОценок пока нет
- Review Color SensorДокумент14 страницReview Color SensorHamza HebОценок пока нет
- Yamaha Cp4 Cp40 StageДокумент32 страницыYamaha Cp4 Cp40 StageEnrique GilОценок пока нет
- Device Load Monitor With Programmable Meter For Energy AuditДокумент5 страницDevice Load Monitor With Programmable Meter For Energy AuditMandeep G KashyapОценок пока нет
- Wiring Diagram Panel SyncronДокумент18 страницWiring Diagram Panel SyncronDeni DendenОценок пока нет
- MDR 20 24 - 2724928Документ2 страницыMDR 20 24 - 2724928ilarroceascribdОценок пока нет
- 73 Magazine - Special Antenna Issue - May 1968Документ116 страниц73 Magazine - Special Antenna Issue - May 1968Benjamin Dover100% (1)
- Timer/counter: The AVR Microcontroller and Embedded Systems Using Assembly and CДокумент35 страницTimer/counter: The AVR Microcontroller and Embedded Systems Using Assembly and CSreeraj PisharodyОценок пока нет
- Placa 30 - Toshiba Satellite A135 Compal LA-3391P IAYAA Rev1.0 Schematic PDFДокумент48 страницPlaca 30 - Toshiba Satellite A135 Compal LA-3391P IAYAA Rev1.0 Schematic PDFSergio GalliОценок пока нет
- Digital Voltage Regulator: Installation and MaintenanceДокумент80 страницDigital Voltage Regulator: Installation and MaintenanceAnkadi Sikari ReddyОценок пока нет
- MagPi Magazine - May 2021 MagPi105Документ100 страницMagPi Magazine - May 2021 MagPi105Benjamin DoverОценок пока нет
- CHIEFTEC - PPS-750FC - 750W - SOCE 5723 - Report PDFДокумент1 страницаCHIEFTEC - PPS-750FC - 750W - SOCE 5723 - Report PDFegeОценок пока нет
- Electrolux EW23BC71IS0 Refrigerator Tech SheetДокумент2 страницыElectrolux EW23BC71IS0 Refrigerator Tech SheetEdison EspinalОценок пока нет
- Tenovis AVAYAДокумент688 страницTenovis AVAYAUlrich AzorОценок пока нет
- IFP Materials PDFДокумент38 страницIFP Materials PDFProcess EngineerОценок пока нет
- Scania DEC2 Control System: Part. No. 1 588 594Документ15 страницScania DEC2 Control System: Part. No. 1 588 594ALBERICO100% (1)