Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Chapter 11Документ12 страницChapter 11JeromeОценок пока нет
- 34ee79a9746d853ef9fa1f44acc55afeДокумент51 страница34ee79a9746d853ef9fa1f44acc55afeSai Pavan MarojuОценок пока нет
- Topic 68 Stress Testing and Other Risk Management ToolsДокумент4 страницыTopic 68 Stress Testing and Other Risk Management ToolsSoumava PalОценок пока нет
- Magnetic ForcesДокумент6 страницMagnetic ForcesJevaughn SmithОценок пока нет
- 5.2 Orthogonal Complements and ProjectionsДокумент17 страниц5.2 Orthogonal Complements and ProjectionsCostalotОценок пока нет
- Concrete Mix Design Is MethodДокумент29 страницConcrete Mix Design Is MethodChirag TanavalaОценок пока нет
- Application of MPC To Cts2-CorrecetdДокумент150 страницApplication of MPC To Cts2-CorrecetdhbuddyОценок пока нет
- ASB-410 JQL in Jira Service Desk Slides and NotesДокумент198 страницASB-410 JQL in Jira Service Desk Slides and NotesCarlos GarciaОценок пока нет
- Descriptive STatistics For Qualitative DataДокумент34 страницыDescriptive STatistics For Qualitative DataMwanjala GasambiОценок пока нет
- I. Objectives: S10FE-llg-50Документ10 страницI. Objectives: S10FE-llg-50John Loreto MentesОценок пока нет
- Test AnxietyДокумент6 страницTest AnxietyDanyОценок пока нет
- Self-Practice Coding QuestionsДокумент2 страницыSelf-Practice Coding QuestionsNguyen HoangОценок пока нет
- A Case Study in Ow Assurance of A Pipeline-Riser System Using OLGAДокумент10 страницA Case Study in Ow Assurance of A Pipeline-Riser System Using OLGAAhmed BedhiefОценок пока нет
- Quarter 1: Learner'S MaterialДокумент39 страницQuarter 1: Learner'S MaterialCynara AlexaОценок пока нет
- QWE Case StudyДокумент5 страницQWE Case StudyShubhendra vatsaОценок пока нет
- Strouhal AДокумент8 страницStrouhal Asivaaero41Оценок пока нет
- Physics Lab Report Newton2.docx 2Документ18 страницPhysics Lab Report Newton2.docx 2Omar MustafaОценок пока нет
- SimuPlot5 ManualДокумент25 страницSimuPlot5 Manualikorishor ambaОценок пока нет
- Aits 2021 FT Ix Jeem.Документ16 страницAits 2021 FT Ix Jeem.Atharv AtoleОценок пока нет
- Boyle's Law: PV Constant. See Also GasesДокумент2 страницыBoyle's Law: PV Constant. See Also GasesMarc Eric Redondo100% (1)
- Eqps + Notes (TCS)Документ92 страницыEqps + Notes (TCS)vinayak pawarОценок пока нет
- GATE 2020 Online Test Series:: Civil EngineeringДокумент6 страницGATE 2020 Online Test Series:: Civil EngineeringAvinash JhaОценок пока нет
- MECH60561 2022 23 Pressure Vessel ExerciseДокумент3 страницыMECH60561 2022 23 Pressure Vessel ExerciseAli JabranОценок пока нет
- GATE ECE Solved Paper - 2005Документ24 страницыGATE ECE Solved Paper - 2005Shashi KanthОценок пока нет
- Chap 1 A - PropositionsДокумент44 страницыChap 1 A - Propositionsعمار الدلال100% (1)
- Modelacion Calida Agua Parte 1Документ14 страницModelacion Calida Agua Parte 1Gisell AguilarОценок пока нет
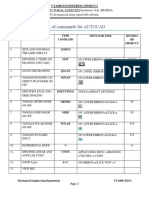
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareДокумент15 страницList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelОценок пока нет
- Programmable Logic ControllersДокумент31 страницаProgrammable Logic Controllersgpz10100% (15)
- Linear and Nonlinear Propagation Characteristics of Multi-Gaussian Laser BeamsДокумент11 страницLinear and Nonlinear Propagation Characteristics of Multi-Gaussian Laser Beamsba mooОценок пока нет
- 3 - ANN Part One PDFДокумент30 страниц3 - ANN Part One PDFIsmael EspinozaОценок пока нет