Вам также может понравиться
- Binder 1Документ2 страницыBinder 1Mohamed BenbarkОценок пока нет
- Carte MontaleДокумент1 страницаCarte MontaleMohamed BenbarkОценок пока нет
- Cour de PC - 2 FR CollegeДокумент3 страницыCour de PC - 2 FR CollegeMohamed BenbarkОценок пока нет
- Cours PDFДокумент44 страницыCours PDFChaouki Abdallah100% (1)
- Programe TCДокумент1 страницаPrograme TCMohamed BenbarkОценок пока нет
- Lecon 5Документ24 страницыLecon 5فاطمة الزهراء الناصريОценок пока нет
- Controle 1 S2 3APIC Mod1 (WWW - Pc1.ma)Документ1 страницаControle 1 S2 3APIC Mod1 (WWW - Pc1.ma)Mohamed BenbarkОценок пока нет
- JJДокумент2 страницыJJMohamed BenbarkОценок пока нет
- Programe TCДокумент1 страницаPrograme TCMohamed BenbarkОценок пока нет
- 20Документ1 страница20Mohamed BenbarkОценок пока нет
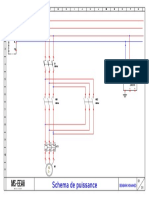
- Shema de PuissanceДокумент1 страницаShema de PuissanceMohamed BenbarkОценок пока нет
- Output PDFДокумент1 страницаOutput PDFMohamed BenbarkОценок пока нет
- MnémoniquesДокумент1 страницаMnémoniquesMohamed BenbarkОценок пока нет
- OB11Документ2 страницыOB11Mohamed BenbarkОценок пока нет
- MLДокумент3 страницыMLMohamed BenbarkОценок пока нет
- DEMARRAGE DIRECT A 2 SENS - Folio 01Документ1 страницаDEMARRAGE DIRECT A 2 SENS - Folio 01Mohamed BenbarkОценок пока нет
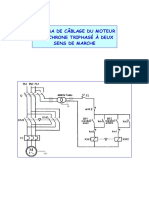
- Moteur Asynchrone PDFДокумент1 страницаMoteur Asynchrone PDFMohamed BenbarkОценок пока нет
- Lecon 3Документ12 страницLecon 3Mohamed BenbarkОценок пока нет
- MLДокумент3 страницыMLMohamed BenbarkОценок пока нет
- 1 - Test Diagnostique 1ACДокумент1 страница1 - Test Diagnostique 1ACMohamed BenbarkОценок пока нет
- Code D'enregistrementДокумент1 страницаCode D'enregistrementMohamed BenbarkОценок пока нет
- Polycopie D Rached PDFДокумент57 страницPolycopie D Rached PDFهبة الرحمانОценок пока нет
- Quantification ESIEA PDFДокумент34 страницыQuantification ESIEA PDFMohamed BenbarkОценок пока нет
- Code D'enregistrementДокумент1 страницаCode D'enregistrementMohamed BenbarkОценок пока нет
- CompteДокумент2 страницыCompteMohamed BenbarkОценок пока нет
- Num PDFДокумент9 страницNum PDFMohamed BenbarkОценок пока нет
- Citation 263088751Документ1 страницаCitation 263088751Mohamed BenbarkОценок пока нет
- Comnum 1Документ14 страницComnum 1Pj le WelpiОценок пока нет
- 20XX XX - Cours.codage en Ligne - Fiche.comnumДокумент17 страниц20XX XX - Cours.codage en Ligne - Fiche.comnumMohamed BenbarkОценок пока нет