Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Solution Manual For Investment Science by David LuenbergerДокумент94 страницыSolution Manual For Investment Science by David Luenbergerkoenajax96% (28)
- Ss 1 Further Mathematics Lesson 4Документ7 страницSs 1 Further Mathematics Lesson 4Adio Babatunde Abiodun CabaxОценок пока нет
- 00.concrete Mix Design-RailwayДокумент38 страниц00.concrete Mix Design-RailwaySoundar PachiappanОценок пока нет
- Detection of Repetitive Forex Chart PatternsДокумент8 страницDetection of Repetitive Forex Chart PatternsDwight ThothОценок пока нет
- Method Statement For Epoxy Risen Floor Coating SystemДокумент7 страницMethod Statement For Epoxy Risen Floor Coating SystemAnjo MolinaОценок пока нет
- Project Engineer Job DescriptionДокумент2 страницыProject Engineer Job DescriptionAnjo MolinaОценок пока нет
- Gsat Installation-08Документ1 страницаGsat Installation-08Anjo MolinaОценок пока нет
- Gsat Installation-04Документ1 страницаGsat Installation-04Anjo MolinaОценок пока нет
- Gsat Installation-09Документ1 страницаGsat Installation-09Anjo MolinaОценок пока нет
- Gsat Installation-10Документ1 страницаGsat Installation-10Anjo MolinaОценок пока нет
- Gsat Installation-05Документ1 страницаGsat Installation-05Anjo MolinaОценок пока нет
- Gsat Installation-02Документ1 страницаGsat Installation-02Anjo MolinaОценок пока нет
- Site Engineer Job DescriptionДокумент1 страницаSite Engineer Job DescriptionAnjo MolinaОценок пока нет
- Project Engineer 03Документ1 страницаProject Engineer 03Anjo MolinaОценок пока нет
- Gsat Installation-03Документ1 страницаGsat Installation-03Anjo MolinaОценок пока нет
- How To Become A Materials EngineerДокумент4 страницыHow To Become A Materials EngineerAnjo MolinaОценок пока нет
- Project Engineer 12Документ1 страницаProject Engineer 12Anjo MolinaОценок пока нет
- Project Engineer 15Документ1 страницаProject Engineer 15Anjo MolinaОценок пока нет
- Project Engineer 14Документ1 страницаProject Engineer 14Anjo MolinaОценок пока нет
- Project Engineer 13Документ1 страницаProject Engineer 13Anjo MolinaОценок пока нет
- Project Engineer 09Документ1 страницаProject Engineer 09Anjo MolinaОценок пока нет
- Project Engineer 11Документ1 страницаProject Engineer 11Anjo MolinaОценок пока нет
- Project Engineer 01Документ1 страницаProject Engineer 01Anjo MolinaОценок пока нет
- Project Engineer 04Документ1 страницаProject Engineer 04Anjo MolinaОценок пока нет
- Method Statement For Temporary Ladder Access Scaffolding and Walkway For Hanging PlatformДокумент6 страницMethod Statement For Temporary Ladder Access Scaffolding and Walkway For Hanging PlatformAnjo MolinaОценок пока нет
- 2ND Floor Toilet PDFДокумент1 страница2ND Floor Toilet PDFAnjo MolinaОценок пока нет
- Method Statement For Application of Waterproofing MembraneДокумент5 страницMethod Statement For Application of Waterproofing MembraneAnjo MolinaОценок пока нет
- Project Engineer 08Документ1 страницаProject Engineer 08Anjo MolinaОценок пока нет
- Project Engineer 04Документ1 страницаProject Engineer 04Anjo MolinaОценок пока нет
- The Site: PerspectiveДокумент1 страницаThe Site: PerspectiveAnjo MolinaОценок пока нет
- A B C D A B C D: Mr. & Mrs. Apolinar Randy Corpuz Proposed Two Storey BuildingДокумент1 страницаA B C D A B C D: Mr. & Mrs. Apolinar Randy Corpuz Proposed Two Storey BuildingAnjo MolinaОценок пока нет
- Method Statement For Assembly of 200 Ton Crawler CraneДокумент7 страницMethod Statement For Assembly of 200 Ton Crawler CraneAnjo MolinaОценок пока нет
- Method Statement For Stone Finish GRC Fabrication and ErectionДокумент5 страницMethod Statement For Stone Finish GRC Fabrication and ErectionAnjo MolinaОценок пока нет
- Bid Notice Abstract: Invitation To Bid (ITB)Документ2 страницыBid Notice Abstract: Invitation To Bid (ITB)Anjo MolinaОценок пока нет
- Physics Gcse Coursework Resistance of A WireДокумент8 страницPhysics Gcse Coursework Resistance of A Wiref5dq3ch5100% (2)
- Ruby On Rails 3 Cheat SheetДокумент7 страницRuby On Rails 3 Cheat SheetJarosław MedwidОценок пока нет
- C V RamanДокумент8 страницC V RamanJayesh KomalwarОценок пока нет
- LETRIST Locally Encoded Transform Feature HistograДокумент16 страницLETRIST Locally Encoded Transform Feature HistograHARE KRISHNAОценок пока нет
- Numerical ModelДокумент61 страницаNumerical ModelAlbert AguileraОценок пока нет
- Fil Mur Filter FM Alt P61e5Документ23 страницыFil Mur Filter FM Alt P61e5ALlan ABiangОценок пока нет
- RWC 123 Manoj Prabhakar KaiwartДокумент13 страницRWC 123 Manoj Prabhakar KaiwartManoj Prabhakar KaiwartОценок пока нет
- Ims PrecalДокумент10 страницIms PrecalRhea GlipoОценок пока нет
- Sample Paper III (Science) - Question PaperДокумент21 страницаSample Paper III (Science) - Question Paperfathima MiranОценок пока нет
- Phrasal Verbs-Syntactic BehaviorДокумент4 страницыPhrasal Verbs-Syntactic BehaviorAntonija KnezovićОценок пока нет
- ML Observability Build Vs Buy Download Guide 1689038317Документ31 страницаML Observability Build Vs Buy Download Guide 1689038317rastrol7Оценок пока нет
- Experimental Techniques For Low Temperature Measurements PDFДокумент2 страницыExperimental Techniques For Low Temperature Measurements PDFVanessaОценок пока нет
- DS1103 Datasheet PDFДокумент6 страницDS1103 Datasheet PDFRosario RiveraОценок пока нет
- Gantt ChartДокумент4 страницыGantt ChartSyed FaridОценок пока нет
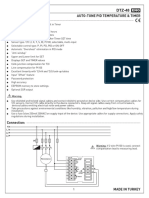
- Auto-Tune Pid Temperature & Timer General Specifications: N L1 L2 L3Документ4 страницыAuto-Tune Pid Temperature & Timer General Specifications: N L1 L2 L3sharawany 20Оценок пока нет
- Typical Detailing of Reinforcements in Beams and SlabsДокумент2 страницыTypical Detailing of Reinforcements in Beams and SlabsNaveen BansalОценок пока нет
- Analiza Procesa Ocenjivanja Na Časovima Matematike - BaucalДокумент22 страницыAnaliza Procesa Ocenjivanja Na Časovima Matematike - BaucalНевенка ЈовановићОценок пока нет
- ELEMAGДокумент1 страницаELEMAGJasper BantulaОценок пока нет
- Baulkham Hills 2012 2U Prelim Yearly & SolutionsДокумент11 страницBaulkham Hills 2012 2U Prelim Yearly & SolutionsYe ZhangОценок пока нет
- Psychometric Development and Validation of GaslightingДокумент15 страницPsychometric Development and Validation of GaslightingYang ZhangОценок пока нет
- Open Source Software Development and Lotka's Law: Bibliometric Patterns in ProgrammingДокумент10 страницOpen Source Software Development and Lotka's Law: Bibliometric Patterns in ProgrammingAttya ShahidОценок пока нет
- OVA37066E: Product Data SheetДокумент2 страницыOVA37066E: Product Data SheetFred BionОценок пока нет
- T8 - Energetics IДокумент28 страницT8 - Energetics II Kadek Irvan Adistha PutraОценок пока нет
- Plate - 3 (FLOT)Документ2 страницыPlate - 3 (FLOT)patrick dgОценок пока нет
- Ant CabДокумент93 страницыAnt CabZubair MinhasОценок пока нет
- List of Knapsack Problems: 2 Multiple ConstraintsДокумент3 страницыList of Knapsack Problems: 2 Multiple ConstraintssaiОценок пока нет