
Вам также может понравиться
- Tellez Robles Maria Del Rayo Arcelia Balanceo: Centro de MasaДокумент20 страницTellez Robles Maria Del Rayo Arcelia Balanceo: Centro de MasaChoko GarciaОценок пока нет
- Space CurvesДокумент20 страницSpace CurvesРЕКА ХОАНГОценок пока нет
- Universidad Privada Del Norte: Facultad: Ingeniería Carrera Profesional: Ing. CivilДокумент12 страницUniversidad Privada Del Norte: Facultad: Ingeniería Carrera Profesional: Ing. CivilThalía Hernandez CiezaОценок пока нет
- 2.27 Find The Inverse Z Transform Of: Tugas 3: Kerjakan Dengan MatlabДокумент4 страницы2.27 Find The Inverse Z Transform Of: Tugas 3: Kerjakan Dengan MatlabAnonymous 6G7cJcBОценок пока нет
- Answer Form Experimental Problem No. 1 Diode Laser WavelengthДокумент10 страницAnswer Form Experimental Problem No. 1 Diode Laser WavelengthPhanОценок пока нет
- Menhitung Portal Dengan Cara TakabeaДокумент4 страницыMenhitung Portal Dengan Cara TakabeaElli QuiolОценок пока нет
- Eq Dynamic Problem SolutionДокумент7 страницEq Dynamic Problem SolutionSai RamОценок пока нет
- Lolo0030: InstituteДокумент5 страницLolo0030: Institutearygun29Оценок пока нет
- Lecture07 CaiДокумент17 страницLecture07 CaiWilliam Sin Chau WaiОценок пока нет
- Invetigacion de OperacionesДокумент18 страницInvetigacion de OperacionesAmanda Herrera CermeñoОценок пока нет
- Slope DeflexionДокумент20 страницSlope DeflexionSebastian Joel MontesinosОценок пока нет
- Spherical Harmonics MathgematicaДокумент6 страницSpherical Harmonics MathgematicaBatОценок пока нет
- Well Logging Penentuan Zona SWДокумент17 страницWell Logging Penentuan Zona SWteknik geofisika enam belasОценок пока нет
- HW Week 8 NBДокумент14 страницHW Week 8 NBUrsula TrigosОценок пока нет
- C&S 9.2-c - Jupyter NotebookДокумент7 страницC&S 9.2-c - Jupyter NotebookPatel AnjaliОценок пока нет
- Tutorial 3 - SolutionsДокумент8 страницTutorial 3 - Solutionsjuliyet strucОценок пока нет
- Dynamic plot3d object tabviewДокумент4 страницыDynamic plot3d object tabviewMANISHAОценок пока нет
- Perhitungan Reaksi AntaraДокумент9 страницPerhitungan Reaksi AntaraLia Yuli KusumaОценок пока нет
- Sphere Tor UsДокумент1 страницаSphere Tor UsaamnaahОценок пока нет
- Residues PDFДокумент6 страницResidues PDFMirkoMontecinosCortezОценок пока нет
- Residues PDFДокумент6 страницResidues PDFtoooooОценок пока нет
- The Matlab Command Residue Allows One To Do Partial Fraction ExpansionДокумент6 страницThe Matlab Command Residue Allows One To Do Partial Fraction ExpansionmirkoОценок пока нет
- Matlab Residue Command ExplainedДокумент6 страницMatlab Residue Command ExplainedMirkoMontecinosCortezОценок пока нет
- The Matlab Command Residue Allows One To Do Partial Fraction ExpansionДокумент6 страницThe Matlab Command Residue Allows One To Do Partial Fraction Expansionowais malikОценок пока нет
- Tarea 19 Control de VibracionesДокумент4 страницыTarea 19 Control de VibracionesCristobal DavidОценок пока нет
- 2012/2013 Vibration Theory and Applications Assignment 1 (By Lin Shaodun, A0066078X)Документ4 страницы2012/2013 Vibration Theory and Applications Assignment 1 (By Lin Shaodun, A0066078X)Erdiner ParmaksızОценок пока нет
- by Table For N, 3.678, 0.247, TURE NДокумент1 страницаby Table For N, 3.678, 0.247, TURE Nly21171007cynthiaОценок пока нет
- Planning for Bridge Girder CalculationДокумент49 страницPlanning for Bridge Girder CalculationindraОценок пока нет
- HW 2Документ13 страницHW 2api-285777244Оценок пока нет
- Intro 2 MatrixДокумент9 страницIntro 2 MatrixLuterОценок пока нет
- Problem Solutions For Chapter 3Документ12 страницProblem Solutions For Chapter 3api-19870706Оценок пока нет
- Jupyter Notebook Solves Heat Transfer ODEДокумент7 страницJupyter Notebook Solves Heat Transfer ODEPatel AnjaliОценок пока нет
- Structural Theory: By: Engr. Ma. Angelica C. Avillanosa, MsceДокумент32 страницыStructural Theory: By: Engr. Ma. Angelica C. Avillanosa, MsceIvy Jill Jurada100% (1)
- Intro 2 MatrixДокумент9 страницIntro 2 MatrixGeorge PuiuОценок пока нет
- 3.3. Modular Arithmetic, Rsa Algorithm 52Документ7 страниц3.3. Modular Arithmetic, Rsa Algorithm 52Dinesh jkОценок пока нет
- Review of D-Q-O TransformationДокумент10 страницReview of D-Q-O TransformationDinesh ShettyОценок пока нет
- CG Assignment 57vsvesgu2tpvoweДокумент7 страницCG Assignment 57vsvesgu2tpvowe592bwd9zvkОценок пока нет
- Homework6asol.fall2019Документ12 страницHomework6asol.fall2019irqudratОценок пока нет
- SMДокумент6 страницSMA ChannelОценок пока нет
- 2nd Introduction To The Matrix PackageДокумент9 страниц2nd Introduction To The Matrix PackagePepito Doe JuanNadieОценок пока нет
- Introducción de Matrices en RДокумент9 страницIntroducción de Matrices en RLuIsEnriqueTaCoZuletaОценок пока нет
- MATH HOMEWORK SOLUTIONSДокумент2 страницыMATH HOMEWORK SOLUTIONSArun TyagiОценок пока нет
- CSM Chapters12 PDFДокумент29 страницCSM Chapters12 PDFClau AmaiiaОценок пока нет
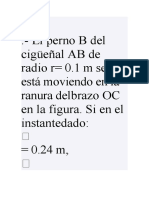
- .-El Perno B Del Cigüeñal AB de Radio R 0.1 M Se Está Moviendo en La Ranura Delbrazo OC en La Figura. Si en El Instantedado: 0.24 MДокумент38 страниц.-El Perno B Del Cigüeñal AB de Radio R 0.1 M Se Está Moviendo en La Ranura Delbrazo OC en La Figura. Si en El Instantedado: 0.24 MErick DacОценок пока нет
- 2nd Introduction To The Matrix PackageДокумент9 страниц2nd Introduction To The Matrix PackageMauro KradОценок пока нет
- Chap54 7Документ6 страницChap54 7balakaleesОценок пока нет
- Nov7 PDFДокумент6 страницNov7 PDFMohamed SayedОценок пока нет
- Kerr black holes: Metric structure and regularity of particle orbitsДокумент6 страницKerr black holes: Metric structure and regularity of particle orbitsYoni Ramirez RoblesОценок пока нет
- Mathassignment PDFДокумент5 страницMathassignment PDFMeentageОценок пока нет
- Big M method for LPP with lower boundsДокумент4 страницыBig M method for LPP with lower boundsTempapara AccountakaraОценок пока нет
- Chapter3 12Документ14 страницChapter3 12Siddhartha PramanickОценок пока нет
- Solutions of Homework 4Документ11 страницSolutions of Homework 4Архи́пОценок пока нет
- Laboratory Activity 1 - Introduction To MATLAB (Part1)Документ8 страницLaboratory Activity 1 - Introduction To MATLAB (Part1)Nigel ArugayОценок пока нет
- UEAnal. Ch-4Документ12 страницUEAnal. Ch-4DilekОценок пока нет
- Matrices with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")От EverandMatrices with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Рейтинг: 3 из 5 звезд3/5 (4)
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesОт EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesОценок пока нет
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesОт EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesРейтинг: 1.5 из 5 звезд1.5/5 (2)
- TRIZ 40 PrinciplesДокумент42 страницыTRIZ 40 Principlesjkulasa100% (3)
- Dinámica de Maquinaria Tarea 11 Momento de InerciaДокумент4 страницыDinámica de Maquinaria Tarea 11 Momento de InerciaLuisAldamaОценок пока нет
- The Adventures of Sherlock Holmes 1 A Scandal in BohemiaДокумент20 страницThe Adventures of Sherlock Holmes 1 A Scandal in BohemiaLee Cheah EuОценок пока нет
- TRIZ 40 PrinciplesДокумент42 страницыTRIZ 40 Principlesjkulasa100% (3)
- RD Sharma Class 11 Maths Chapter 11 Trigonometric EquationsДокумент17 страницRD Sharma Class 11 Maths Chapter 11 Trigonometric EquationsBhushan kumarОценок пока нет
- Math trigonometric solutionsДокумент25 страницMath trigonometric solutionsAnswermanОценок пока нет
- Methods of DifferentiationДокумент13 страницMethods of DifferentiationVishruth Reddy BuruguОценок пока нет
- Solutions 3D GEOMETRY TRIANGLESДокумент15 страницSolutions 3D GEOMETRY TRIANGLESAna Clara Maria Ramirez FleumerОценок пока нет
- HSC Trigonometric FormulaeДокумент1 страницаHSC Trigonometric FormulaeAMIN BUHARI ABDUL KHADER67% (3)
- Trigonometric FunctionsДокумент19 страницTrigonometric FunctionsKristin CastilloОценок пока нет
- Sine and Cosine Table 0° - 90Документ1 страницаSine and Cosine Table 0° - 90Debbie Engel KaiserОценок пока нет
- Identitas TrigonoДокумент5 страницIdentitas TrigonoPutri NilamsariОценок пока нет
- Leaving Cert Maths TablesДокумент5 страницLeaving Cert Maths TablesMark ConnollyОценок пока нет
- Techniques of Integration - SolutionsДокумент31 страницаTechniques of Integration - Solutionsferrari2winОценок пока нет
- Math 111: Summary of Trig IdentitiesДокумент1 страницаMath 111: Summary of Trig IdentitiesJhan Ray Gomez BarrilОценок пока нет
- Problem Set 1,2 ML Khana Complex NumberДокумент17 страницProblem Set 1,2 ML Khana Complex NumberSIDDHANT GUDWANIОценок пока нет
- 12/Fast Track Objective ArithmeticДокумент4 страницы12/Fast Track Objective ArithmeticSainul Haque MollaОценок пока нет
- Higher Math 1st Paper 2024Документ9 страницHigher Math 1st Paper 2024itisjitu01Оценок пока нет
- Indefinite IntegrationДокумент29 страницIndefinite IntegrationBharti Pant GahtoriОценок пока нет
- Fourier Series Exercises Set 1Документ3 страницыFourier Series Exercises Set 1FEOLO RIEL BENITEZ TARAYОценок пока нет
- Student Report Card Project PDFДокумент16 страницStudent Report Card Project PDFSanjay Patil100% (1)
- Sup 2aДокумент3 страницыSup 2aSamОценок пока нет
- Learn CBSE: MCQ Questions For Class 10 Maths Introduction To Trigonometry With AnswersДокумент43 страницыLearn CBSE: MCQ Questions For Class 10 Maths Introduction To Trigonometry With Answerstindutt life timeОценок пока нет
- AN46 ANSWERS Analytic Trigonometry Sections 7.1-7.3Документ9 страницAN46 ANSWERS Analytic Trigonometry Sections 7.1-7.3Paul TurnerОценок пока нет
- 9-Inverse Trigonometric RatiosДокумент4 страницы9-Inverse Trigonometric RatiosKNAH TutoringОценок пока нет
- 16-Inverse Trigonometric Function-01 - TheoryДокумент24 страницы16-Inverse Trigonometric Function-01 - TheoryRaju SinghОценок пока нет
- Trigonometric Functions of Acute Angle (Lesson 3)Документ4 страницыTrigonometric Functions of Acute Angle (Lesson 3)Teylan Ruzzel BartОценок пока нет
- Complex Numbers WorksheetДокумент4 страницыComplex Numbers WorksheetSoundarya SivakumarОценок пока нет
- Graphs of Trigonometric FunctionsДокумент22 страницыGraphs of Trigonometric FunctionsRishu RajОценок пока нет
- Sahyadri Classes Mathematics XII - A DivДокумент11 страницSahyadri Classes Mathematics XII - A Div310-Pravin DoifodeОценок пока нет
- Reduction To Functions of Positive Acute AnglesДокумент8 страницReduction To Functions of Positive Acute Anglesx seyiОценок пока нет
- IM2 CW#34 U4L8 - Inverse Functions PracticeДокумент2 страницыIM2 CW#34 U4L8 - Inverse Functions PracticeMakoto EnochsОценок пока нет
- I.T.F AssignmentДокумент7 страницI.T.F AssignmentKunal ChaudharyОценок пока нет
- Inter First YearДокумент40 страницInter First YearpooririthwikОценок пока нет
























































![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-1-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1699542561?v=1)


































