Вам также может понравиться
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
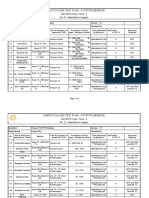
- Inspection and Test Plan - Pot/Ptfe BearingДокумент3 страницыInspection and Test Plan - Pot/Ptfe BearingrohitОценок пока нет
- Cycle Chemistry CommissioningДокумент11 страницCycle Chemistry CommissioningKrishnan Mani100% (1)
- Objective Civil EngineeringДокумент59 страницObjective Civil Engineeringutsav_koshtiОценок пока нет
- Module 9 Gestalt PsychologyДокумент14 страницModule 9 Gestalt PsychologyAnna Liese100% (6)
- Guide of Methods For Determining The Condition of Stator Winding Insulation - ELT - 270 - 3 PDFДокумент4 страницыGuide of Methods For Determining The Condition of Stator Winding Insulation - ELT - 270 - 3 PDFrad1962Оценок пока нет
- Toy Car Lab - 2Документ3 страницыToy Car Lab - 2api-260771184Оценок пока нет
- Gou 2016-Robust Hybrid Simulation With PDFДокумент326 страницGou 2016-Robust Hybrid Simulation With PDFutsav_koshtiОценок пока нет
- Parameter Estimation of Bouc-Wen Hysteretic Systems by Sawtooth Genetic AlgorithmДокумент18 страницParameter Estimation of Bouc-Wen Hysteretic Systems by Sawtooth Genetic Algorithmutsav_koshtiОценок пока нет
- 10.1007@978 94 024 0867 6 PDFДокумент735 страниц10.1007@978 94 024 0867 6 PDFutsav_koshtiОценок пока нет
- Conv Gaetanomiraglia Xxxi Assembled PHD Thesis v2 PDFДокумент214 страницConv Gaetanomiraglia Xxxi Assembled PHD Thesis v2 PDFutsav_koshtiОценок пока нет
- Research Article: Seismic Performance Evaluation of Building-Damper System Under Near-Fault EarthquakeДокумент21 страницаResearch Article: Seismic Performance Evaluation of Building-Damper System Under Near-Fault Earthquakeutsav_koshtiОценок пока нет
- Research ArticleДокумент6 страницResearch Articleutsav_koshtiОценок пока нет
- Experimental and Numerical Analysis of MR Dampers: Manuel T. Braz-César, Rui C. BarrosДокумент19 страницExperimental and Numerical Analysis of MR Dampers: Manuel T. Braz-César, Rui C. Barrosutsav_koshtiОценок пока нет
- A New Approach in Fatigue Testing and Evaluation of Hot Mix Asphalt Using A Dynamic Shear RheometerДокумент10 страницA New Approach in Fatigue Testing and Evaluation of Hot Mix Asphalt Using A Dynamic Shear Rheometerutsav_koshtiОценок пока нет
- Master Class Solving Optimization Problems With MatlabДокумент110 страницMaster Class Solving Optimization Problems With Matlabutsav_koshtiОценок пока нет
- Modal Analysis For Random Vibration of Hysteretic FramesДокумент19 страницModal Analysis For Random Vibration of Hysteretic Framesutsav_koshtiОценок пока нет
- Modeling and Random Vibration Analysis of Sdof Systems With Asymmetric HysteresisДокумент12 страницModeling and Random Vibration Analysis of Sdof Systems With Asymmetric Hysteresisutsav_koshtiОценок пока нет
- V. Nonlinear Regression by Modified Gauss-Newton Method: TheoryДокумент39 страницV. Nonlinear Regression by Modified Gauss-Newton Method: Theoryutsav_koshtiОценок пока нет
- Method Nonlinear Least-SquaresДокумент30 страницMethod Nonlinear Least-SquaresIzul MkОценок пока нет
- Chapter 05 - Least Squares PDFДокумент27 страницChapter 05 - Least Squares PDFadlantama prihadiОценок пока нет
- DssДокумент98 страницDssnaveenpnaidu1100% (1)
- Enhancing An Upper Division Structural Dynamics Course Using KneДокумент16 страницEnhancing An Upper Division Structural Dynamics Course Using Kneutsav_koshtiОценок пока нет
- SeismoStruct 2021 User Manual - ENG PDFДокумент562 страницыSeismoStruct 2021 User Manual - ENG PDFutsav_koshtiОценок пока нет
- SeismoStruct 2021 User Manual - ENG PDFДокумент562 страницыSeismoStruct 2021 User Manual - ENG PDFutsav_koshtiОценок пока нет
- Numerical Study of A Hybrid Damping System Composed of A Buckling Restrained Brace With A Magneto Rheological DamperДокумент8 страницNumerical Study of A Hybrid Damping System Composed of A Buckling Restrained Brace With A Magneto Rheological Damperutsav_koshtiОценок пока нет
- Numerical Study of A Hybrid Damping System Composed of A Buckling Restrained Brace With A Magneto Rheological DamperДокумент8 страницNumerical Study of A Hybrid Damping System Composed of A Buckling Restrained Brace With A Magneto Rheological Damperutsav_koshtiОценок пока нет
- RCC - Civil Engineering Objective QuestionsДокумент9 страницRCC - Civil Engineering Objective Questionsutsav_koshtiОценок пока нет
- Development of Small Scale Models For K 12 and Undergraduate Students To Demonstrate Earthquake Effects On Building Structures and Aseismic Design ProceduresДокумент23 страницыDevelopment of Small Scale Models For K 12 and Undergraduate Students To Demonstrate Earthquake Effects On Building Structures and Aseismic Design Proceduresutsav_koshtiОценок пока нет
- Deepfoundation 160805203054Документ51 страницаDeepfoundation 160805203054Mohammed HazemОценок пока нет
- Bili Near HysteresisДокумент5 страницBili Near HysteresisMauricio_Vera_5259Оценок пока нет
- MATLAB Programming For Numerical ComputationsДокумент12 страницMATLAB Programming For Numerical Computationstsram90Оценок пока нет
- 1 Matlab IntroДокумент21 страница1 Matlab IntroankursonicivilОценок пока нет
- Master Thesis MAS500 MR Damper Hysteresis Characterization For The Semi-Active Suspension SystemДокумент65 страницMaster Thesis MAS500 MR Damper Hysteresis Characterization For The Semi-Active Suspension Systemutsav_koshtiОценок пока нет
- Nlls SlidesДокумент22 страницыNlls Slidesutsav_koshtiОценок пока нет
- Appendix D PDFДокумент16 страницAppendix D PDFFloren Ardila AlvaradoОценок пока нет
- Krakatau Eruption Power PointДокумент13 страницKrakatau Eruption Power PointNatalia PadillaОценок пока нет
- Combined Homework 8 PDFДокумент16 страницCombined Homework 8 PDFAnsh SrivastavaОценок пока нет
- 13.2 Biotic & Abiotic FactorsДокумент3 страницы13.2 Biotic & Abiotic FactorsOmar AlwaerОценок пока нет
- How To Format A Political Science Research PaperДокумент8 страницHow To Format A Political Science Research Paperfvesdf9j100% (1)
- The Identification of Unknown Compound Lab ReportДокумент5 страницThe Identification of Unknown Compound Lab Reportwgoodin0% (1)
- Franklin 1988Документ16 страницFranklin 1988Verônica VieiraОценок пока нет
- Delhi Public School Bangalore North ACADEMIC SESSION 2022-2023 Class - ViiiДокумент28 страницDelhi Public School Bangalore North ACADEMIC SESSION 2022-2023 Class - Viiiharahej45Оценок пока нет
- Lec 02 Intelligent AgentsДокумент40 страницLec 02 Intelligent AgentsRizwan100% (1)
- iFIX Automation Reference Section2Документ587 страницiFIX Automation Reference Section2megamoto02 motosОценок пока нет
- This Study Resource Was: Page 1 of 7Документ7 страницThis Study Resource Was: Page 1 of 7pawestmОценок пока нет
- A Practical Approach For Determining The Grounding Grid PDFДокумент6 страницA Practical Approach For Determining The Grounding Grid PDFOscar ZambranoОценок пока нет
- Statistical Soup - ANOVA, ANCOVA, MANOVA, & MANCOVAДокумент1 страницаStatistical Soup - ANOVA, ANCOVA, MANOVA, & MANCOVAsapaОценок пока нет
- Aqe Final Assignment: Ms. Nanika Kaushal Assistant Professor, NiftДокумент12 страницAqe Final Assignment: Ms. Nanika Kaushal Assistant Professor, NiftVidya Sagar ChowdaryОценок пока нет
- A Service Response To The Pandemic: Open Circle and Restorative Justice During COVID-19Документ3 страницыA Service Response To The Pandemic: Open Circle and Restorative Justice During COVID-19Gabriel RochaОценок пока нет
- Deepwater Horizon Oil SpillДокумент5 страницDeepwater Horizon Oil SpillKartik GuptaОценок пока нет
- 04mindset2 Unit3 Test OralProductionДокумент2 страницы04mindset2 Unit3 Test OralProductionAndrea David MartínezОценок пока нет
- Answer The Following Question by Referring To The ReadingДокумент3 страницыAnswer The Following Question by Referring To The ReadingNovaldo GuchiОценок пока нет
- Ko 2015Документ22 страницыKo 2015Mudavath Babu RamОценок пока нет
- Harmonic Response Analysis: I. Two Mass Spring SystemДокумент5 страницHarmonic Response Analysis: I. Two Mass Spring SystemDinesh_Tadkapa_62Оценок пока нет
- Lesson 1.1 Angles in A Unit CircleДокумент16 страницLesson 1.1 Angles in A Unit CircleReign AguadoОценок пока нет
- Advanced Navigation System For Aircraft Applicatio PDFДокумент8 страницAdvanced Navigation System For Aircraft Applicatio PDFKastor ROОценок пока нет
- Uk EssaysДокумент7 страницUk Essaysvotukezez1z2100% (2)
- Combinepdf 2Документ19 страницCombinepdf 2Nehal IsmailОценок пока нет
- 0 Unit - 47 - Games - Development - Assignment - 1Документ5 страниц0 Unit - 47 - Games - Development - Assignment - 1AndrewОценок пока нет
- Sodium Chloride: Product Data Sheet (PDS)Документ1 страницаSodium Chloride: Product Data Sheet (PDS)Mannar1Оценок пока нет