Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Sedimment Management MethodsДокумент6 страницSedimment Management MethodsPujan NeupaneОценок пока нет
- Geology IIДокумент23 страницыGeology IISonam ShahОценок пока нет
- Microbiologia AmbientalДокумент389 страницMicrobiologia AmbientalLaura Bosco100% (1)
- Surface Water Wonder: Chendrachoodeshwarar Temple Tank, Hosur-Tamil NaduДокумент4 страницыSurface Water Wonder: Chendrachoodeshwarar Temple Tank, Hosur-Tamil NaduRed AuxyОценок пока нет
- Pollution 1as Term 1s1Документ2 страницыPollution 1as Term 1s1LI ASОценок пока нет
- T36 - TMW 2021 - Characterization and Evaluation of The Undrained Shear StrengthДокумент10 страницT36 - TMW 2021 - Characterization and Evaluation of The Undrained Shear StrengthMauro P Dos Santos JuniorОценок пока нет
- Human Environment System DissДокумент25 страницHuman Environment System DissDaisyl Husain100% (1)
- 1stQ-G11 - Test-QuestionsДокумент6 страниц1stQ-G11 - Test-QuestionsMich100% (1)
- Unit 9 - Reading 2Документ5 страницUnit 9 - Reading 2Huynh Thi Cam NhungОценок пока нет
- 1.3 Earth's ProcessesДокумент4 страницы1.3 Earth's ProcessesRufo FelixОценок пока нет
- HP Lovecraft Omnibus 1 - at The Mountains of Madness PDFДокумент230 страницHP Lovecraft Omnibus 1 - at The Mountains of Madness PDFGensai Kawakami100% (1)
- Nets For Microplastic SamplingДокумент2 страницыNets For Microplastic SamplingSamira KiwanОценок пока нет
- 2 - Ecosystems and Its ComponentsДокумент16 страниц2 - Ecosystems and Its ComponentsJohn PitaoОценок пока нет
- International Geography Class 7 PDFДокумент41 страницаInternational Geography Class 7 PDFFarhanUlHaq33% (3)
- Chapter 2 Investigation For Bridge DesignДокумент32 страницыChapter 2 Investigation For Bridge DesignMastiy WasihunОценок пока нет
- Polymetallic NodulesДокумент8 страницPolymetallic NodulesDavid PurataОценок пока нет
- Statement of PurposeДокумент1 страницаStatement of PurposeMuhammad Budie DharmaОценок пока нет
- BorelogsДокумент4 страницыBorelogsOrbital PublishingОценок пока нет
- Mississauga Development Requirements ManualДокумент60 страницMississauga Development Requirements Manualfan0321Оценок пока нет
- Y6 Autumn Block 1 WO8 Negative Numbers 2022Документ2 страницыY6 Autumn Block 1 WO8 Negative Numbers 2022M alfyОценок пока нет
- United States PatentДокумент5 страницUnited States PatentRom AureОценок пока нет
- Coastal Regulation in India - A Saga of BetrayalДокумент5 страницCoastal Regulation in India - A Saga of BetrayalEquitable Tourism Options (EQUATIONS)Оценок пока нет
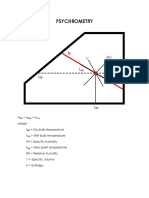
- Psychrometry: V RH T T SHДокумент13 страницPsychrometry: V RH T T SHKAL ELОценок пока нет
- The Tropical RainforestsДокумент4 страницыThe Tropical RainforestsTheodora BotescuОценок пока нет
- AsiaДокумент1 страницаAsiaMarvi NavarroОценок пока нет
- Air Quality DataДокумент2 страницыAir Quality DataTryani RamdaniОценок пока нет
- 10 Erodible ChannelsДокумент26 страниц10 Erodible ChannelsJohn Rheynor MayoОценок пока нет
- Geological Geohazard Assessment Field Engineer S Course 11082019 PDFДокумент71 страницаGeological Geohazard Assessment Field Engineer S Course 11082019 PDFAisah Hadji Fahad-SolaimanОценок пока нет
- Fossil Detectives Field GuideДокумент38 страницFossil Detectives Field Guideaoife12394% (17)
- Vocabulary For Ielts - GeographyДокумент3 страницыVocabulary For Ielts - GeographyJuliana Andrea Perdomo RojasОценок пока нет