Вам также может понравиться
- Dokumen - Tips - Indra Works Ds Tuning Procedure Ams Controls 2015 10 12 Continuing Place TheДокумент19 страницDokumen - Tips - Indra Works Ds Tuning Procedure Ams Controls 2015 10 12 Continuing Place TheSaanounОценок пока нет
- Manual Utilizare Cytec - c05Документ20 страницManual Utilizare Cytec - c05dashocОценок пока нет
- Megasquirt Instruction 1.6 MiataДокумент16 страницMegasquirt Instruction 1.6 MiataRyan KorbianОценок пока нет
- Backlash ProgramДокумент32 страницыBacklash ProgramCristopher Entena50% (2)
- Cad Tutorial Number 5Документ22 страницыCad Tutorial Number 5arulvasanth_30011980Оценок пока нет
- W221 en PDFДокумент13 страницW221 en PDFalirio0% (1)
- Anti Lock Brake System (Tata Motors Information)Документ16 страницAnti Lock Brake System (Tata Motors Information)Tapas Banerjee100% (3)
- Rollmaster: High Performance Timing Chain Sets Degreeing in Your CamshaftДокумент2 страницыRollmaster: High Performance Timing Chain Sets Degreeing in Your Camshafttito titoОценок пока нет
- Setup Stepper MotorsgДокумент10 страницSetup Stepper MotorsgJorge GomisОценок пока нет
- Challenger7 Fly by Wire - V100Документ21 страницаChallenger7 Fly by Wire - V100GustavoОценок пока нет
- Unity3d Car TutorialДокумент13 страницUnity3d Car TutorialMichael ButlerОценок пока нет
- CNCDesign Coil Winder Software Manual V1 2Документ46 страницCNCDesign Coil Winder Software Manual V1 2DeaferrantОценок пока нет
- CNCDesign Coil Winder Software Manual V1 2 PDFДокумент46 страницCNCDesign Coil Winder Software Manual V1 2 PDFDeaferrant50% (2)
- Vortech Operating ManualДокумент10 страницVortech Operating ManualDoug LaursenОценок пока нет
- Dicktator: Engine Management SystemДокумент37 страницDicktator: Engine Management Systemnikonair_tongaat100% (2)
- DegreeingcamshafttДокумент2 страницыDegreeingcamshafttmohd azzuhri kumaranОценок пока нет
- How To Replace An ABS Control UnitДокумент53 страницыHow To Replace An ABS Control UnitاحمدميدوОценок пока нет
- Lesson 8 - Formula One Car DesignДокумент15 страницLesson 8 - Formula One Car DesignNdianabasi UdonkangОценок пока нет
- Unity3D Car Tutorial: by Andrew GotowДокумент20 страницUnity3D Car Tutorial: by Andrew GotowMadhu SudhanОценок пока нет
- Indraworks Ds Tuning Procedures SercosДокумент18 страницIndraworks Ds Tuning Procedures SercosCésar Tapia100% (1)
- Precor 9.27 ServiceManualДокумент58 страницPrecor 9.27 ServiceManualAdrian Garcia FrancoОценок пока нет
- Tacx Flow ManualДокумент17 страницTacx Flow Manualfixie1979Оценок пока нет
- These Instructions Must Be Followed Exactly!: "Flatshift" Quick Setup Guide - Using Barrel TriggeringДокумент2 страницыThese Instructions Must Be Followed Exactly!: "Flatshift" Quick Setup Guide - Using Barrel Triggeringandres castilloОценок пока нет
- Odometer W211 W219 X164 W164 W203 W251 W463 R171 W209Документ15 страницOdometer W211 W219 X164 W164 W203 W251 W463 R171 W209Armen GevorgyanОценок пока нет
- Fuel Injector Timing: NoticeДокумент5 страницFuel Injector Timing: Noticeعمار العماريОценок пока нет
- SM Setup Guide and Chassis Tuning TipsДокумент9 страницSM Setup Guide and Chassis Tuning TipsrendaoОценок пока нет
- Upgrade From V0.94 To V1.03Документ8 страницUpgrade From V0.94 To V1.03Javier RojasОценок пока нет
- Crank and Cam Angle SensorsДокумент21 страницаCrank and Cam Angle SensorsalooookiОценок пока нет
- Nissan Check Engine Light Codes & ECU ResetДокумент29 страницNissan Check Engine Light Codes & ECU ResetMu Netsi0% (1)
- Manual Equus 810 070Документ10 страницManual Equus 810 070Juan Ramón100% (1)
- MRCK Guideline 1-0Документ35 страницMRCK Guideline 1-0DucmazОценок пока нет
- P+S SKATER Mini ManualДокумент17 страницP+S SKATER Mini ManualElectra/Off TraxОценок пока нет
- Motor Bee ManualДокумент21 страницаMotor Bee ManualGianniFisaОценок пока нет
- Software User's Manual: Tony Foale Designs © 2006-2018Документ62 страницыSoftware User's Manual: Tony Foale Designs © 2006-2018faizОценок пока нет
- 1541-1571 Drive Alignment Free SpiritДокумент12 страниц1541-1571 Drive Alignment Free Spiritfredflintstone61Оценок пока нет
- Startup of A Synchronous non-SEW Motor Setting The Motor EncoderДокумент21 страницаStartup of A Synchronous non-SEW Motor Setting The Motor EncoderrezakaihaniОценок пока нет
- 4 Wheel Steer CalibrationДокумент8 страниц4 Wheel Steer CalibrationFrancisco Santiago GallardoОценок пока нет
- 37 Press Brake ControllersДокумент7 страниц37 Press Brake ControllersPutra Eka Wiguna MandiriОценок пока нет
- ENA&BBS Controller Reprogram ManualДокумент8 страницENA&BBS Controller Reprogram Manual555.cml28gmail.comОценок пока нет
- Autodesk ConstraintsДокумент16 страницAutodesk ConstraintsrkoGearОценок пока нет
- Trabajo de Alinaedor de Ejes Ingles SKFДокумент5 страницTrabajo de Alinaedor de Ejes Ingles SKFAlejandra DiazОценок пока нет
- SmartCamber - Owner's ManualДокумент16 страницSmartCamber - Owner's ManualnfstreyОценок пока нет
- ©2014 DJI. All Rights ReservedДокумент10 страниц©2014 DJI. All Rights ReservedAm Amfmvk KekОценок пока нет
- Tuning Your MegaSquirt PDFДокумент25 страницTuning Your MegaSquirt PDFRenan AlvimОценок пока нет
- Jog Wheel Calibration Guide EnglishДокумент19 страницJog Wheel Calibration Guide EnglishmcriborОценок пока нет
- Volkswagen Passat B6 - Windshield Wipe SystemДокумент60 страницVolkswagen Passat B6 - Windshield Wipe SystemiTiSWRiTTENОценок пока нет
- 4 Wheel Robot Drive TutorialДокумент28 страниц4 Wheel Robot Drive TutorialksaloneОценок пока нет
- Microremotebooklet v1Документ12 страницMicroremotebooklet v1api-275924347Оценок пока нет
- Geared Machine Motor Alignment Procedure With Cables On BULL 1006Документ2 страницыGeared Machine Motor Alignment Procedure With Cables On BULL 1006Nazar AlrodainyОценок пока нет
- Assem ManualДокумент33 страницыAssem ManualMenandro AmbanlocОценок пока нет
- Repair Guides For CPSДокумент8 страницRepair Guides For CPSAmosi AmosiОценок пока нет
- FPVFreerider ManualДокумент15 страницFPVFreerider ManualAlberto de Jesús Santos VillalobosОценок пока нет
- FPVFreerider ManualДокумент15 страницFPVFreerider ManualOskar ZubiaОценок пока нет
- FourBar SW Version2009Документ20 страницFourBar SW Version2009mrmsk4477Оценок пока нет
- John Bean Mod. 8.6-8.7Документ36 страницJohn Bean Mod. 8.6-8.7dionisio emilio reyes jimenezОценок пока нет
- Power Transmission 3WG94Документ54 страницыPower Transmission 3WG94Raul E. Soli100% (3)
- Nissan Ecu Tuning BasicsДокумент26 страницNissan Ecu Tuning BasicsDavid Perez CasalОценок пока нет
- Fiat Ecuscan How To UseДокумент11 страницFiat Ecuscan How To Usedradubuh001Оценок пока нет
- Intro To CNC For A Total NoviceДокумент11 страницIntro To CNC For A Total NoviceIshmael AliОценок пока нет
- Essential Scooter Maintenance for the Absolute BeginnerОт EverandEssential Scooter Maintenance for the Absolute BeginnerОценок пока нет
- Signed Learning Material No. 4A Data ManagementДокумент15 страницSigned Learning Material No. 4A Data ManagementLyssa-Ann De JesusОценок пока нет
- Balloon Scale: Air Has Weight: Objective: Materials: ProcedureДокумент9 страницBalloon Scale: Air Has Weight: Objective: Materials: ProcedureDaoud KhanОценок пока нет
- AERODYN2 - Quiz 4 - SolutionsДокумент10 страницAERODYN2 - Quiz 4 - SolutionsSecretОценок пока нет
- Literary Devices Unleashed: Authored by Vicki Davis (@)Документ2 страницыLiterary Devices Unleashed: Authored by Vicki Davis (@)zemirah cadaveroОценок пока нет
- Rheinmetall 120mm BrochureДокумент20 страницRheinmetall 120mm BrochureAlbert Abesson100% (1)
- BurhminhmaДокумент4 страницыBurhminhmaJeyrameel PandiyanОценок пока нет
- Chapter-Wise SSC Solved Papers - Sample Chapters: This Section Is Taken From The BookДокумент8 страницChapter-Wise SSC Solved Papers - Sample Chapters: This Section Is Taken From The BookVidya BhaskarОценок пока нет
- C Programming LanguageДокумент191 страницаC Programming LanguageKarthikeyan KОценок пока нет
- Oil Smoke and Oil Mist Separators: With High PerformanceДокумент2 страницыOil Smoke and Oil Mist Separators: With High PerformanceMartin TurbantОценок пока нет
- Chapter-85 (Electrical Items)Документ13 страницChapter-85 (Electrical Items)Atiqur RahmanОценок пока нет
- ATSEДокумент2 страницыATSEoperanorissОценок пока нет
- 8.3 PLSQL PPT Ch7 PDFДокумент18 страниц8.3 PLSQL PPT Ch7 PDFDunОценок пока нет
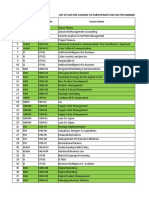
- Elective Courses List For Epgp-14 BatchДокумент7 страницElective Courses List For Epgp-14 BatchAbirami NarayananОценок пока нет
- 955i Torque SpecificationsДокумент6 страниц955i Torque SpecificationsRodney Alan Armarego100% (3)
- 5 - Network Flow ProblemsДокумент30 страниц5 - Network Flow ProblemsKaran KumarОценок пока нет
- SaCoNeT 2018 8585583Документ6 страницSaCoNeT 2018 8585583Noel LiarteОценок пока нет
- AI Better FutureДокумент128 страницAI Better FutureAndy K100% (1)
- Star CD UserДокумент406 страницStar CD Userpranav razdanОценок пока нет
- Project QuestionДокумент35 страницProject Questiongnger308Оценок пока нет
- Air-Cooled Scroll Condensing Units: 035-22868-000 Supersedes 150.73-NM1 (918) Form 150.73-NM1Документ164 страницыAir-Cooled Scroll Condensing Units: 035-22868-000 Supersedes 150.73-NM1 (918) Form 150.73-NM1mugger400Оценок пока нет
- Data Science For AgricultureДокумент5 страницData Science For AgriculturesmartguykrishОценок пока нет
- Disc-Mower-Parts Fella SM 270Документ4 страницыDisc-Mower-Parts Fella SM 270JanuszОценок пока нет
- The ROI of 3D Printing: Ultimaker White PaperДокумент13 страницThe ROI of 3D Printing: Ultimaker White PaperDarko LesoskiОценок пока нет
- Facebook Ads For Hair Salons - A Comprehensive Guide PDFДокумент15 страницFacebook Ads For Hair Salons - A Comprehensive Guide PDFAlejandro PabaОценок пока нет
- User Manual: RS232/RS485/RS422 / Modbus - ConverterДокумент26 страницUser Manual: RS232/RS485/RS422 / Modbus - Converterel misОценок пока нет
- Temperature Controls K57 Series: Features and BenefitsДокумент2 страницыTemperature Controls K57 Series: Features and BenefitsmaresliviuОценок пока нет
- عماد فاينلДокумент17 страницعماد فاينلChristina FingtonОценок пока нет
- Dokumen - Tips Outlook150silver CA Black b5 Whitewf Blue SP Catalog For Keeway OutlookДокумент27 страницDokumen - Tips Outlook150silver CA Black b5 Whitewf Blue SP Catalog For Keeway OutlookRafael GuaicaraОценок пока нет
- FortranДокумент150 страницFortranJuan GarciaОценок пока нет
- G406L Quad CH Video Wall Controller Datasheet V2.02Документ7 страницG406L Quad CH Video Wall Controller Datasheet V2.02Noob Master IndonesiaОценок пока нет