Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Ultrasonic Interrogating System and Exciter-Detector Circuit ThereforДокумент12 страницUltrasonic Interrogating System and Exciter-Detector Circuit ThereforbingwazzupОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
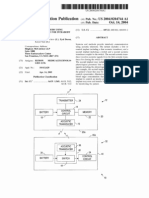
- Apparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsДокумент18 страницApparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsbingwazzupОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Ip Multicast Part1Документ18 страницIp Multicast Part1Pallab PalОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Csat 11Документ52 страницыCsat 11Mossad NewsОценок пока нет
- The Use of RFID For Human Identification A DRAFT REPORT From DHS Emerging Applications and Technology SubcommitteeДокумент14 страницThe Use of RFID For Human Identification A DRAFT REPORT From DHS Emerging Applications and Technology SubcommitteespectabearОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- DEW Electromagnetic SpectrumДокумент3 страницыDEW Electromagnetic SpectrumbingwazzupОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Invisible Third World War by W. H. Bowart and Richard SuttonДокумент35 страницThe Invisible Third World War by W. H. Bowart and Richard Suttonhisroyalslynessone2funkОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- An Overview of Acoustic TelemetryДокумент11 страницAn Overview of Acoustic TelemetrybingwazzupОценок пока нет
- Directed Energy WeaponsДокумент368 страницDirected Energy WeaponsPete Santilli100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Radio Direction FinderДокумент78 страницRadio Direction Finderbingwazzup100% (1)
- Aerial Laser ScanningДокумент244 страницыAerial Laser Scanningbingwazzup100% (1)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Cloning The EmotionsДокумент2 страницыCloning The Emotionsbingwazzup100% (1)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Radio Armateur Microwave Communications HandbookДокумент192 страницыThe Radio Armateur Microwave Communications HandbookRapee Dev100% (1)
- Model of A Monopulse Radar Tracking System For Student LaboratoryДокумент6 страницModel of A Monopulse Radar Tracking System For Student Laboratorybingwazzup100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Infra SoundДокумент7 страницInfra Soundbingwazzup100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Random Noise Monopulse Radar System For Covert Tracking of TargetsДокумент10 страницRandom Noise Monopulse Radar System For Covert Tracking of TargetsbingwazzupОценок пока нет
- An Investigation On The Physiological and Psychological Effects of Infrasound On PersonsДокумент6 страницAn Investigation On The Physiological and Psychological Effects of Infrasound On Personsbingwazzup100% (1)
- Silent Sound TechnologyДокумент2 страницыSilent Sound TechnologybingwazzupОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Radio Direction FinderДокумент78 страницRadio Direction Finderbingwazzup100% (1)
- Electromagnetic Weapons TimelineДокумент6 страницElectromagnetic Weapons Timelinebingwazzup100% (1)
- Pulsed Microwave TechnologyДокумент2 страницыPulsed Microwave TechnologybingwazzupОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Biological AmplificationДокумент2 страницыBiological AmplificationbingwazzupОценок пока нет
- Most Common Known Electronic Low FrequencyДокумент4 страницыMost Common Known Electronic Low Frequencybingwazzup100% (1)
- Telepathy and The Technology of Mind ControlДокумент18 страницTelepathy and The Technology of Mind Controlbingwazzup100% (2)
- Automated Object Oriented Door BellДокумент3 страницыAutomated Object Oriented Door Bellcarl eliotОценок пока нет
- Timer PWM Questions and AnswersДокумент4 страницыTimer PWM Questions and AnswersAbdallah MiidouneОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Shanon HartleyДокумент5 страницShanon Hartleynlb53Оценок пока нет
- Direct Digital SynthesizerДокумент3 страницыDirect Digital SynthesizerHarini MОценок пока нет
- Shatterpro Sensor Ds PDFДокумент2 страницыShatterpro Sensor Ds PDFOmar Andres Novoa MartinezОценок пока нет
- Narayana Engineering College:: Nellore: (Autonomous) Iv-Ii Ece Sub: Rfic Question BankДокумент6 страницNarayana Engineering College:: Nellore: (Autonomous) Iv-Ii Ece Sub: Rfic Question BankContent for all CreatorОценок пока нет
- 5G Americas URLLLC White Paper Final updateJWДокумент60 страниц5G Americas URLLLC White Paper Final updateJWsergemartinbkkОценок пока нет
- Accurate 3d Maps For Wireless Network Planning and Op Misa OnДокумент2 страницыAccurate 3d Maps For Wireless Network Planning and Op Misa OngurungsitaОценок пока нет
- OptimДокумент16 страницOptimAverage Ayul EnjoyerОценок пока нет
- P25 Trunked System Overview For Radio User Train-the-TrainerДокумент24 страницыP25 Trunked System Overview For Radio User Train-the-TrainermachinmayОценок пока нет
- THH12 Transmitter (Rev A)Документ6 страницTHH12 Transmitter (Rev A)Nilson CruzОценок пока нет
- Simple Wav Player Using ArduinoДокумент6 страницSimple Wav Player Using ArduinoLord_Darth_VaderОценок пока нет
- Quad-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltДокумент1 страницаQuad-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltДмитрий СпиридоновОценок пока нет
- 800 10 302Документ2 страницы800 10 302slymnОценок пока нет
- Error Detection and Correction.1Документ31 страницаError Detection and Correction.1Aliya GОценок пока нет
- Bluetooth PresentationДокумент20 страницBluetooth Presentationshekhu1986Оценок пока нет
- P7 ConfigДокумент71 страницаP7 ConfigCandri FerianaОценок пока нет
- Antenna Analyzer vk5jst Version 1 Instructions PDFДокумент10 страницAntenna Analyzer vk5jst Version 1 Instructions PDFPisu Miau Pisu MiauОценок пока нет
- General Packet Radio Service (GPRS)Документ8 страницGeneral Packet Radio Service (GPRS)DeepakОценок пока нет
- 3GPP WP Rel 15 OverviewДокумент11 страниц3GPP WP Rel 15 OverviewraghavchОценок пока нет
- Internship Report Caa PakistanДокумент18 страницInternship Report Caa Pakistanziaullah88Оценок пока нет
- Oscillator Resonator Design Tutorial: 1 AbstractДокумент20 страницOscillator Resonator Design Tutorial: 1 Abstractmelvin45Оценок пока нет
- Optical Transport Network (OTN) : G709otn - WP - Opt - TM - Ae PDFДокумент31 страницаOptical Transport Network (OTN) : G709otn - WP - Opt - TM - Ae PDFnokiaa7610Оценок пока нет
- Opportunities and Challenges For Mesh Networks Using Directional AntennasДокумент24 страницыOpportunities and Challenges For Mesh Networks Using Directional AntennasbaruaeeeОценок пока нет
- GATE Signals & Systems BookДокумент12 страницGATE Signals & Systems BookFaniAliОценок пока нет
- EESS 502: Earth Station Technical and Operational Minimum Requirements - Standard MДокумент40 страницEESS 502: Earth Station Technical and Operational Minimum Requirements - Standard MSUNILОценок пока нет
- 17hp1a0452 SeminarДокумент34 страницы17hp1a0452 Seminarvenkat addepalliОценок пока нет
- Specification: (Gl2 Only) .................. Dynamic Responding Turn On at - 20dbuДокумент2 страницыSpecification: (Gl2 Only) .................. Dynamic Responding Turn On at - 20dbuAlenMomirovićОценок пока нет
- HPSS Datasheet 100604 Final PrintДокумент2 страницыHPSS Datasheet 100604 Final PrintIdoz SpОценок пока нет
- Page 1 of 2 Technical DescriptionДокумент2 страницыPage 1 of 2 Technical Descriptionehab-engОценок пока нет
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsОт EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsРейтинг: 5 из 5 звезд5/5 (1)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxОт EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxРейтинг: 4.5 из 5 звезд4.5/5 (67)