Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Check Fraud Running Rampant in 2023 Insights ArticleДокумент4 страницыCheck Fraud Running Rampant in 2023 Insights ArticleJames Brown bitchОценок пока нет
- Cabling and Connection System PDFДокумент16 страницCabling and Connection System PDFLyndryl ProvidoОценок пока нет
- Lab 6 PicoblazeДокумент6 страницLab 6 PicoblazeMadalin NeaguОценок пока нет
- Government of West Bengal Finance (Audit) Department: NABANNA', HOWRAH-711102 No. Dated, The 13 May, 2020Документ2 страницыGovernment of West Bengal Finance (Audit) Department: NABANNA', HOWRAH-711102 No. Dated, The 13 May, 2020Satyaki Prasad MaitiОценок пока нет
- Use of EnglishДокумент4 страницыUse of EnglishBelén SalituriОценок пока нет
- 6 V 6 PlexiДокумент8 страниц6 V 6 PlexiFlyinGaitОценок пока нет
- Research Article: Finite Element Simulation of Medium-Range Blast Loading Using LS-DYNAДокумент10 страницResearch Article: Finite Element Simulation of Medium-Range Blast Loading Using LS-DYNAAnonymous cgcKzFtXОценок пока нет
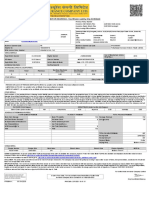
- MOTOR INSURANCE - Two Wheeler Liability Only SCHEDULEДокумент1 страницаMOTOR INSURANCE - Two Wheeler Liability Only SCHEDULESuhail V VОценок пока нет
- The Effectiveness of Risk Management: An Analysis of Project Risk Planning Across Industries and CountriesДокумент13 страницThe Effectiveness of Risk Management: An Analysis of Project Risk Planning Across Industries and Countriesluisbmwm6Оценок пока нет
- Phase 1: API Lifecycle (2 Days)Документ3 страницыPhase 1: API Lifecycle (2 Days)DevendraОценок пока нет
- Embedded Systems DesignДокумент576 страницEmbedded Systems Designnad_chadi8816100% (4)
- Address MappingДокумент26 страницAddress MappingLokesh KumarОценок пока нет
- Laporan Praktikum Fisika - Full Wave RectifierДокумент11 страницLaporan Praktikum Fisika - Full Wave RectifierLasmaenita SiahaanОценок пока нет
- JAZEL Resume-2-1-2-1-3-1Документ2 страницыJAZEL Resume-2-1-2-1-3-1GirlieJoyGayoОценок пока нет
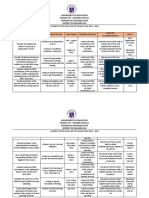
- Action Plan Lis 2021-2022Документ3 страницыAction Plan Lis 2021-2022Vervie BingalogОценок пока нет
- Ibbotson Sbbi: Stocks, Bonds, Bills, and Inflation 1926-2019Документ2 страницыIbbotson Sbbi: Stocks, Bonds, Bills, and Inflation 1926-2019Bastián EnrichОценок пока нет
- Mat Boundary Spring Generator With KX Ky KZ KMX KMy KMZДокумент3 страницыMat Boundary Spring Generator With KX Ky KZ KMX KMy KMZcesar rodriguezОценок пока нет
- Channel Tables1Документ17 страницChannel Tables1erajayagrawalОценок пока нет
- 18 - PPAG-100-HD-C-001 - s018 (VBA03C013) - 0 PDFДокумент1 страница18 - PPAG-100-HD-C-001 - s018 (VBA03C013) - 0 PDFSantiago GarciaОценок пока нет
- CodebreakerДокумент3 страницыCodebreakerwarrenОценок пока нет
- TSR KuДокумент16 страницTSR KuAngsaОценок пока нет
- CA Inter Group 1 Book November 2021Документ251 страницаCA Inter Group 1 Book November 2021VISHAL100% (2)
- Daraman vs. DENRДокумент2 страницыDaraman vs. DENRJeng GacalОценок пока нет
- Astm E53 98Документ1 страницаAstm E53 98park991018Оценок пока нет
- As 60068.5.2-2003 Environmental Testing - Guide To Drafting of Test Methods - Terms and DefinitionsДокумент8 страницAs 60068.5.2-2003 Environmental Testing - Guide To Drafting of Test Methods - Terms and DefinitionsSAI Global - APACОценок пока нет
- Using Boss Tone Studio For Me-25Документ4 страницыUsing Boss Tone Studio For Me-25Oskar WojciechowskiОценок пока нет
- Role of The Government in HealthДокумент6 страницRole of The Government in Healthptv7105Оценок пока нет
- Ajp Project (1) MergedДокумент22 страницыAjp Project (1) MergedRohit GhoshtekarОценок пока нет
- Computer First Term Q1 Fill in The Blanks by Choosing The Correct Options (10x1 10)Документ5 страницComputer First Term Q1 Fill in The Blanks by Choosing The Correct Options (10x1 10)Tanya HemnaniОценок пока нет
- Linux For Beginners - Shane BlackДокумент165 страницLinux For Beginners - Shane BlackQuod Antichristus100% (1)