Вам также может понравиться
- Programming The GPIO in Spear BoardДокумент62 страницыProgramming The GPIO in Spear Boardsamiie30Оценок пока нет
- SG 244810Документ430 страницSG 244810crucifferОценок пока нет
- FinFET Modeling for IC Simulation and Design: Using the BSIM-CMG StandardОт EverandFinFET Modeling for IC Simulation and Design: Using the BSIM-CMG StandardРейтинг: 5 из 5 звезд5/5 (1)
- Developing Applications On STM32Cube With LwIP TCP-IP StackДокумент44 страницыDeveloping Applications On STM32Cube With LwIP TCP-IP StackVport Port100% (1)
- Smart Card Applications: Design models for using and programming smart cardsОт EverandSmart Card Applications: Design models for using and programming smart cardsОценок пока нет
- UM1734 User Manual: STM32Cube™ USB Device LibraryДокумент60 страницUM1734 User Manual: STM32Cube™ USB Device LibraryJohnnyОценок пока нет
- PIC Microcontroller Projects in C: Basic to AdvancedОт EverandPIC Microcontroller Projects in C: Basic to AdvancedРейтинг: 5 из 5 звезд5/5 (10)
- Sprufp 2 AДокумент39 страницSprufp 2 ALLОценок пока нет
- Embedded DSP Processor Design: Application Specific Instruction Set ProcessorsОт EverandEmbedded DSP Processor Design: Application Specific Instruction Set ProcessorsОценок пока нет
- UM0892 User Manual: STM32 ST-LINK Utility Software DescriptionДокумент54 страницыUM0892 User Manual: STM32 ST-LINK Utility Software DescriptionNova ArieWidatiОценок пока нет
- Deploying QoS for Cisco IP and Next Generation Networks: The Definitive GuideОт EverandDeploying QoS for Cisco IP and Next Generation Networks: The Definitive GuideРейтинг: 5 из 5 звезд5/5 (2)
- UM1709 User Manual: STM32Cube Ethernet IAP ExampleДокумент22 страницыUM1709 User Manual: STM32Cube Ethernet IAP ExampleTameClaudioОценок пока нет
- Reconfigurable Computing: The Theory and Practice of FPGA-Based ComputationОт EverandReconfigurable Computing: The Theory and Practice of FPGA-Based ComputationОценок пока нет
- UM0892 User Manual: STM32 ST-LINK Utility Software DescriptionДокумент54 страницыUM0892 User Manual: STM32 ST-LINK Utility Software DescriptionBah EulaОценок пока нет
- Triple Play: Building the converged network for IP, VoIP and IPTVОт EverandTriple Play: Building the converged network for IP, VoIP and IPTVОценок пока нет
- Instruction Manual Universal Fieldbus-Gateway Unigate Ic - ProfibusДокумент63 страницыInstruction Manual Universal Fieldbus-Gateway Unigate Ic - ProfibusFakhri GhrairiОценок пока нет
- ST7MC Three-Phase AC Induction Motor Control Software Library-CD00006812Документ102 страницыST7MC Three-Phase AC Induction Motor Control Software Library-CD00006812Dan EsentherОценок пока нет
- Embedded System Design With ARM Cortex M Microcontrollers ApplicationsДокумент576 страницEmbedded System Design With ARM Cortex M Microcontrollers ApplicationsMarcos Aurélio RodriguesОценок пока нет
- Modeling and Verification Using UML Statecharts: A Working Guide to Reactive System Design, Runtime Monitoring and Execution-based Model CheckingОт EverandModeling and Verification Using UML Statecharts: A Working Guide to Reactive System Design, Runtime Monitoring and Execution-based Model CheckingОценок пока нет
- An4964 Micropython Scripting Language Over spwf04s StmicroelectronicsДокумент36 страницAn4964 Micropython Scripting Language Over spwf04s StmicroelectronicsGiani BuzatuОценок пока нет
- BDSC Guide FullДокумент221 страницаBDSC Guide FullAxslr8Оценок пока нет
- THE LTSPICE XVII SIMULATOR: Commands and ApplicationsОт EverandTHE LTSPICE XVII SIMULATOR: Commands and ApplicationsРейтинг: 5 из 5 звезд5/5 (1)
- Your Ticket To All BusesДокумент52 страницыYour Ticket To All BusesCedric SINDJUIОценок пока нет
- Manual Profinet 3HAC031975-001 RevC enДокумент72 страницыManual Profinet 3HAC031975-001 RevC enHerminio GómezОценок пока нет
- RTOSДокумент49 страницRTOSAthul PkОценок пока нет
- LPR Module User GuideДокумент100 страницLPR Module User GuideCelio NevesОценок пока нет
- Um1659 Integrated Development Environment For 32bit Power Architecture Derivatives StmicroelectronicsДокумент25 страницUm1659 Integrated Development Environment For 32bit Power Architecture Derivatives StmicroelectronicsFlynnОценок пока нет
- Dm00403500-Stm32cubeprogrammer-Software-Description-Stmicroelectronics (1) - CompressedДокумент169 страницDm00403500-Stm32cubeprogrammer-Software-Description-Stmicroelectronics (1) - CompressedBubbleОценок пока нет
- IBM AS400 Network Security SSLДокумент364 страницыIBM AS400 Network Security SSLbalan7277Оценок пока нет
- BSP HowtoДокумент110 страницBSP HowtoAkhilesh ChaudhryОценок пока нет
- Transputer Architecture: Reference ManualДокумент31 страницаTransputer Architecture: Reference ManualrobbyyuОценок пока нет
- Esp32-S2 Technical Reference Manual en PDFДокумент702 страницыEsp32-S2 Technical Reference Manual en PDFВася ПупкинОценок пока нет
- Instruction Manual Universal Fieldbus-Gateway Unigate FC - Profinet 2portДокумент48 страницInstruction Manual Universal Fieldbus-Gateway Unigate FC - Profinet 2portedevaldwilsonОценок пока нет
- NanoLOC NTRX Driver Suite UGДокумент32 страницыNanoLOC NTRX Driver Suite UGHugo LoureiroОценок пока нет
- 14121Документ31 страница14121Pankaj Kumar SharmaОценок пока нет
- F 3 Pmux 1 MДокумент32 страницыF 3 Pmux 1 Mesau hernandezОценок пока нет
- Unity Pro ProgrammingДокумент722 страницыUnity Pro ProgrammingAkram Esmaellou100% (1)
- OpenocdДокумент127 страницOpenocdEne AlexandruОценок пока нет
- Chip1768: ARM Cortex-M3 Microcontroller Board With NXP LPC1768Документ22 страницыChip1768: ARM Cortex-M3 Microcontroller Board With NXP LPC1768Siddhasen PatilОценок пока нет
- Unity Pro XL ManualДокумент722 страницыUnity Pro XL ManualCarlos Gallegos100% (3)
- Reader and Gateway Embedded Developers GuideДокумент59 страницReader and Gateway Embedded Developers GuideEulogio ChiviteОценок пока нет
- Discovering The STM32 MicrocontrollerДокумент244 страницыDiscovering The STM32 MicrocontrollerAda Dev Csaba100% (3)
- PLC 2 Unity ReferenceДокумент698 страницPLC 2 Unity ReferenceRodolfo BelchiorОценок пока нет
- STM32F10xx Flash Programming ManualДокумент31 страницаSTM32F10xx Flash Programming ManualMayam AyoОценок пока нет
- IBM System Blue Gene Solution: Blue Gene/P Application DevelopmentДокумент406 страницIBM System Blue Gene Solution: Blue Gene/P Application Developmentnz0ptkОценок пока нет
- ST7 Software LibraryДокумент235 страницST7 Software Libraryapi-3697475100% (2)
- MSPTutorДокумент112 страницMSPTutorNichita IonutОценок пока нет
- Continuous Availability S390 Technology GuideДокумент326 страницContinuous Availability S390 Technology Guidegborja8881331Оценок пока нет
- Ivikha 64 HRXДокумент60 страницIvikha 64 HRXubenr909Оценок пока нет
- SG 247575Документ666 страницSG 247575Quant_GeekОценок пока нет
- BIOS and Kernel Developer's Guide (BKDG) For AMD Family 16h Models 00h-0Fh ProcessorsДокумент921 страницаBIOS and Kernel Developer's Guide (BKDG) For AMD Family 16h Models 00h-0Fh Processorstokuro_22Оценок пока нет
- TCPstack Embedded SystemДокумент98 страницTCPstack Embedded SystemMuneeb AhmadОценок пока нет
- BSP and Device Driver Development Guide: On-Line Applications Research CorporationДокумент106 страницBSP and Device Driver Development Guide: On-Line Applications Research CorporationPradeep SahuОценок пока нет
- Autosar ThesisДокумент57 страницAutosar ThesisKamal SubediОценок пока нет
- AubmanДокумент124 страницыAubmanByron DelgadoОценок пока нет
- RENESYSДокумент5 страницRENESYSJay MehtaОценок пока нет
- Simplification of WCS and ED Syllabus of Max 40 Hours Each and Merging With Trade TheoryДокумент415 страницSimplification of WCS and ED Syllabus of Max 40 Hours Each and Merging With Trade TheorySourav ChowdhuryОценок пока нет
- Patriot RSL: Installation/Owners ManualДокумент60 страницPatriot RSL: Installation/Owners ManualPete GaetaОценок пока нет
- Introduction To Reactor Technology - BWR: Nuclear Regulatory CommissionДокумент10 страницIntroduction To Reactor Technology - BWR: Nuclear Regulatory CommissionJose DenizОценок пока нет
- Used Car Inspection ChecklistДокумент2 страницыUsed Car Inspection ChecklistRavi SarkarОценок пока нет
- DX DiagДокумент18 страницDX DiagBrett AtkinsОценок пока нет
- HXI Maintenance ManualДокумент118 страницHXI Maintenance ManualFrancisco Wilton bezerraОценок пока нет
- WebДокумент72 страницыWebRakesh GunduОценок пока нет
- Fatigue Failure Analysis of Steam TurbinДокумент5 страницFatigue Failure Analysis of Steam TurbinAkash SОценок пока нет
- Programmable Logic ControllerДокумент23 страницыProgrammable Logic Controllergebrerufael hailayОценок пока нет
- EEWeb MagazineДокумент24 страницыEEWeb MagazineAllamОценок пока нет
- UNIT-1 Basic Elements of AutomationДокумент18 страницUNIT-1 Basic Elements of AutomationSudhanshu PatelОценок пока нет
- SPLK-1002 Splunk Core Certified Power User DumpsДокумент11 страницSPLK-1002 Splunk Core Certified Power User Dumpskevin jackyОценок пока нет
- 516 and 520V - 8990324Документ172 страницы516 and 520V - 8990324Samuel Benavides100% (1)
- WebsitesДокумент10 страницWebsitesmariaghelОценок пока нет
- 900169-001-Ovation 1 Quick Start Guide-Rev00 PDFДокумент12 страниц900169-001-Ovation 1 Quick Start Guide-Rev00 PDFNorlan JoinerОценок пока нет
- Java Lab ManualДокумент61 страницаJava Lab ManualManas TripathyОценок пока нет
- 2p6a 0822Документ3 страницы2p6a 0822Wasim IqbalОценок пока нет
- BS EN 50131-1998 Alarm Systems Intrusion Systems Part 6Документ30 страницBS EN 50131-1998 Alarm Systems Intrusion Systems Part 6Michael Camit EsoОценок пока нет
- ALCOA Plus 9 Principles For Data IntegrityДокумент24 страницыALCOA Plus 9 Principles For Data IntegrityMd Amdadul HoqueОценок пока нет
- MS Excel - DemoДокумент32 страницыMS Excel - DemoConnie Marie MagnoОценок пока нет
- Christine Downton's BrainДокумент3 страницыChristine Downton's BrainSudhathJainОценок пока нет
- Electronic Circuit Midterm Lab Exam 92%Документ14 страницElectronic Circuit Midterm Lab Exam 92%marieОценок пока нет
- Guideline For PESP Applicants 2021Документ30 страницGuideline For PESP Applicants 2021Farah CakeyОценок пока нет
- PM Debug InfoДокумент22 страницыPM Debug InfoFrunza AlinОценок пока нет
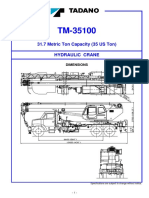
- TM 35100 TM-35100: 31.7 Metric Ton Capacity (35 US Ton) Hydraulic CraneДокумент11 страницTM 35100 TM-35100: 31.7 Metric Ton Capacity (35 US Ton) Hydraulic CraneEder Rodriguez GonzalezОценок пока нет
- 09-VA Vulnerability AnalysisДокумент42 страницы09-VA Vulnerability AnalysisduochonОценок пока нет
- Unicorn 150Документ2 страницыUnicorn 150Nirmal GoreОценок пока нет
- The Unofficial Guide To Learning ONTAP 9 12OCT2017Документ9 страницThe Unofficial Guide To Learning ONTAP 9 12OCT2017sbabups77Оценок пока нет
- Service Manual 'B' SC Vac 16 L. AL2Документ71 страницаService Manual 'B' SC Vac 16 L. AL2Anwar Dheen67% (3)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsОт EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsРейтинг: 5 из 5 звезд5/5 (5)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsОт EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongОценок пока нет
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]От EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Рейтинг: 5 из 5 звезд5/5 (5)
- Digital Transformation: An Executive Guide to Survive and Thrive in the New EconomyОт EverandDigital Transformation: An Executive Guide to Survive and Thrive in the New EconomyРейтинг: 5 из 5 звезд5/5 (1)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102От EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Рейтинг: 5 из 5 звезд5/5 (2)
- Chip War: The Fight for the World's Most Critical TechnologyОт EverandChip War: The Fight for the World's Most Critical TechnologyРейтинг: 4.5 из 5 звезд4.5/5 (82)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyОт EverandChip War: The Quest to Dominate the World's Most Critical TechnologyРейтинг: 4.5 из 5 звезд4.5/5 (230)
- Raspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideОт EverandRaspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideОценок пока нет
- How To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsОт EverandHow To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsОценок пока нет
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)От EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Рейтинг: 5 из 5 звезд5/5 (2)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002От EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Рейтинг: 5 из 5 звезд5/5 (1)
- CompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102От EverandCompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Оценок пока нет
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XОт EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XРейтинг: 3 из 5 звезд3/5 (2)
- Creative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsОт EverandCreative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsРейтинг: 4.5 из 5 звезд4.5/5 (49)
- iPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneОт EverandiPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneОценок пока нет
- Debugging Embedded and Real-Time Systems: The Art, Science, Technology, and Tools of Real-Time System DebuggingОт EverandDebugging Embedded and Real-Time Systems: The Art, Science, Technology, and Tools of Real-Time System DebuggingРейтинг: 5 из 5 звезд5/5 (1)
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionОт EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionРейтинг: 5 из 5 звезд5/5 (2)
- Samsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneОт EverandSamsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneОценок пока нет