Вам также может понравиться
- Experiment 7 FinalsДокумент8 страницExperiment 7 FinalsKlydeJoseОценок пока нет
- Open Circuit Saturation Curve of An Alternator I. ObjectivesДокумент4 страницыOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezОценок пока нет
- Experiment - No.10 Load Test On DC Shunt Motor: DATE:10/12/2021Документ6 страницExperiment - No.10 Load Test On DC Shunt Motor: DATE:10/12/2021Baba YagaОценок пока нет
- Jabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentДокумент63 страницыJabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentSajalОценок пока нет
- 2 Machine LabДокумент4 страницы2 Machine LabManoj GuptaОценок пока нет
- Beeel 1a2Документ12 страницBeeel 1a2Dr. S MuthukumarОценок пока нет
- Electrical and Electronics Lab Manual For Mechanical EngineeringДокумент21 страницаElectrical and Electronics Lab Manual For Mechanical EngineeringSreerag Kunnathu SugathanОценок пока нет
- Lab 3 Squirrel Cage Induction Machine-1Документ8 страницLab 3 Squirrel Cage Induction Machine-1max100% (1)
- Exp 3 Machine EEE206Документ6 страницExp 3 Machine EEE206mahmudulОценок пока нет
- Load Test On Single Phase TransformerДокумент22 страницыLoad Test On Single Phase TransformerNamrajit Dey0% (1)
- Power Generation Transmission Lab ManualДокумент69 страницPower Generation Transmission Lab ManualMuzammil NaeemОценок пока нет
- Exp MachinesДокумент8 страницExp MachinesAngelina JolieОценок пока нет
- Experiment No. 2 DC Compound Generator - Self ExcitedДокумент5 страницExperiment No. 2 DC Compound Generator - Self ExcitedJay EmОценок пока нет
- Expt 6 The Cage Rotor Induction MotorДокумент5 страницExpt 6 The Cage Rotor Induction MotorRyan De GuzmanОценок пока нет
- Uthd LabДокумент5 страницUthd Labanirban0% (1)
- Ashish Singh 2K20CEEE11 Exp-6Документ6 страницAshish Singh 2K20CEEE11 Exp-6Ashish SinghОценок пока нет
- Exercises On Electric Motors.Документ11 страницExercises On Electric Motors.Salman Muneer AhmedОценок пока нет
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERДокумент14 страницAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARОценок пока нет
- V and Inverted V Sync MotorДокумент4 страницыV and Inverted V Sync MotorKrushna PisalОценок пока нет
- WWW - Manaresults.Co - In: B.Tech III Year II Semester (R13) Supplementary Examinations December 2016Документ2 страницыWWW - Manaresults.Co - In: B.Tech III Year II Semester (R13) Supplementary Examinations December 2016Kunte Vikas RaoОценок пока нет
- DCM Lab Manual - 0 PDFДокумент45 страницDCM Lab Manual - 0 PDFVenkata HemanthОценок пока нет
- Modul P2Документ10 страницModul P2Wahjue AjhiieОценок пока нет
- EXPERIMENT8 IДокумент12 страницEXPERIMENT8 IAbhay KotnalaОценок пока нет
- Synchronous Motors SlidesДокумент55 страницSynchronous Motors SlidesKaye Freyssinet Nermal Abanggan100% (1)
- EET 421 Power Electronic Drives: Indra NisjaДокумент48 страницEET 421 Power Electronic Drives: Indra Nisjaaswardi8756Оценок пока нет
- DC Motor Drives (Compatibility Mode)Документ63 страницыDC Motor Drives (Compatibility Mode)Anuar NuafzanОценок пока нет
- Control System Lab ManualДокумент63 страницыControl System Lab ManualkrishnandrkОценок пока нет
- Control Systems Lab Manual-1Документ57 страницControl Systems Lab Manual-1sdfasfОценок пока нет
- MT8311 - Electrical Machines ManualДокумент20 страницMT8311 - Electrical Machines ManualArivanandanОценок пока нет
- Electrical Machines-I Lab Manual R16 Modified PDFДокумент83 страницыElectrical Machines-I Lab Manual R16 Modified PDFsk ibrahimОценок пока нет
- Experiment-6 Single Phase AC Voltage ControllerДокумент14 страницExperiment-6 Single Phase AC Voltage ControllerBobОценок пока нет
- r5410202 Power Semiconductor DrivesДокумент1 страницаr5410202 Power Semiconductor DrivessivabharathamurthyОценок пока нет
- Exp 1 DC Shunt GeneratorДокумент13 страницExp 1 DC Shunt GeneratorKlydeJoseОценок пока нет
- Power Electronic (Pe) SystemДокумент63 страницыPower Electronic (Pe) SystemFarid DafaОценок пока нет
- Induction Motor SimulationДокумент8 страницInduction Motor SimulationSalah RiahiОценок пока нет
- Em-Ii ExperimentДокумент19 страницEm-Ii Experimentprince rajОценок пока нет
- Three-Phase Induction MotorДокумент21 страницаThree-Phase Induction MotorGovel EzraОценок пока нет
- CSLABMANUALДокумент99 страницCSLABMANUALGOKUL RОценок пока нет
- EEE Lab ManualДокумент26 страницEEE Lab ManualPrabin RoyОценок пока нет
- PrinciplesДокумент5 страницPrinciplesSachin RohillaОценок пока нет
- Practical Activity 2 DC Shunt Motor PLMДокумент9 страницPractical Activity 2 DC Shunt Motor PLMMarc Jairro GajudoОценок пока нет
- Analysis of D.C. Electric Motors: EEEE 531 - Mechatronics Experiment #2Документ8 страницAnalysis of D.C. Electric Motors: EEEE 531 - Mechatronics Experiment #2kay_rolОценок пока нет
- DC Shunt MotorДокумент9 страницDC Shunt MotorPeterОценок пока нет
- Electrical and Electronics Engineering Laboratory ManualДокумент36 страницElectrical and Electronics Engineering Laboratory Manualjith16Оценок пока нет
- DC Motor and Speed Control FinalДокумент102 страницыDC Motor and Speed Control FinalMaaz KhanОценок пока нет
- SRM Institute of Science and Technology: 15Ee210L-Electrical Machines Lab-IiДокумент57 страницSRM Institute of Science and Technology: 15Ee210L-Electrical Machines Lab-Iishiva shakthyОценок пока нет
- Chapter 1 DC Drives Part2Документ75 страницChapter 1 DC Drives Part2Mohammad MunzirОценок пока нет
- Aec AssignmentДокумент14 страницAec AssignmentAnnu YadavОценок пока нет
- Generator Capability CurveДокумент142 страницыGenerator Capability CurveCarib40% (5)
- Lab Manual: ACADEMIC YEAR 2015-16Документ48 страницLab Manual: ACADEMIC YEAR 2015-16ramjiОценок пока нет
- Machine - Lab Manual Merged PDFДокумент14 страницMachine - Lab Manual Merged PDFMubin LikhonОценок пока нет
- Circuit Diagram: U19Ee306 - Electrical Machines - I LaboratoryДокумент16 страницCircuit Diagram: U19Ee306 - Electrical Machines - I LaboratorySanthoshОценок пока нет
- Ses-12 TDPSДокумент31 страницаSes-12 TDPSbaljeetjatОценок пока нет
- EVC600C User Manual (English)Документ6 страницEVC600C User Manual (English)dhany reza100% (1)
- P1 - DC Motor Position Control PDFДокумент10 страницP1 - DC Motor Position Control PDFSeptiani DitaОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Toxigenic Fungi in The Indoor EnvironmentДокумент55 страницToxigenic Fungi in The Indoor EnvironmentKlydeJoseОценок пока нет
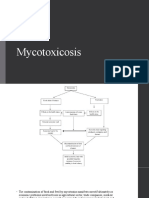
- MycotoxicosisДокумент13 страницMycotoxicosisKlydeJoseОценок пока нет
- Latex Group 1Документ52 страницыLatex Group 1KlydeJoseОценок пока нет
- Environmental Tobacco Smoke ReportДокумент73 страницыEnvironmental Tobacco Smoke ReportKlydeJoseОценок пока нет
- FINAL GELO Drawing v2 PDFДокумент6 страницFINAL GELO Drawing v2 PDFKlydeJoseОценок пока нет
- Final Celeb Plate PDFДокумент4 страницыFinal Celeb Plate PDFKlydeJoseОценок пока нет
- Exp 1 DC Shunt GeneratorДокумент13 страницExp 1 DC Shunt GeneratorKlydeJoseОценок пока нет
- ME198D Exercises PDFДокумент5 страницME198D Exercises PDFKlydeJoseОценок пока нет
- Exp4 Ee22lДокумент1 страницаExp4 Ee22lKlydeJoseОценок пока нет
- QUITO PLATE Drawing v2 PDFДокумент4 страницыQUITO PLATE Drawing v2 PDFKlydeJoseОценок пока нет
- EMG20 Documentary InterviewДокумент1 страницаEMG20 Documentary InterviewKlydeJoseОценок пока нет
- Majority Answer: YesДокумент2 страницыMajority Answer: YesKlydeJoseОценок пока нет
- SFTY100 QuestionsДокумент3 страницыSFTY100 QuestionsKlydeJoseОценок пока нет
- Ideal Gas ProcessesДокумент6 страницIdeal Gas ProcessesKlydeJoseОценок пока нет
- Jose 7/20/2019: Drawn Checked QA MFG Approved DWG No TitleДокумент1 страницаJose 7/20/2019: Drawn Checked QA MFG Approved DWG No TitleKlydeJoseОценок пока нет
- Input OutputДокумент1 страницаInput OutputKlydeJoseОценок пока нет
- Experimental Investigation of Small-Scale Gasification of Woody BiomassДокумент2 страницыExperimental Investigation of Small-Scale Gasification of Woody BiomassKlydeJoseОценок пока нет
- Table 1. Comparison Between The GCI of Philippines, Japan, Argentina. (Excerpt From The World Economic Forum, 2018)Документ2 страницыTable 1. Comparison Between The GCI of Philippines, Japan, Argentina. (Excerpt From The World Economic Forum, 2018)KlydeJoseОценок пока нет
- Lab Report CompleteДокумент30 страницLab Report Completefahadfiaz0% (1)
- BДокумент6 страницBcochr002Оценок пока нет
- Networks TypesДокумент16 страницNetworks TypesNewton Dannie AbelОценок пока нет
- SCE-Hardware Configuration S7-1500 (2016)Документ256 страницSCE-Hardware Configuration S7-1500 (2016)Jorge_Andril_5370Оценок пока нет
- Ficha Tecnica Generador Leroy Somer Tal047aДокумент12 страницFicha Tecnica Generador Leroy Somer Tal047aRoderick SilvaОценок пока нет
- Brochure T BOX MSДокумент4 страницыBrochure T BOX MSPrem KumarОценок пока нет
- DE-6-India BixДокумент21 страницаDE-6-India BixbhagОценок пока нет
- Powertrain Control Module (PCM) : Pin No. Description Connected ToДокумент24 страницыPowertrain Control Module (PCM) : Pin No. Description Connected ToEd KlbОценок пока нет
- Unilap Iso 5 KV: The Insulation ExpertДокумент2 страницыUnilap Iso 5 KV: The Insulation Expertflorin071100% (1)
- CI 8038 - CI 555 FinalДокумент10 страницCI 8038 - CI 555 Finalmaria diazОценок пока нет
- 132 KV GSS Training ReportДокумент35 страниц132 KV GSS Training ReportTREGIC FUN100% (2)
- QRP Magnetic Loop Tuner 80-20mДокумент5 страницQRP Magnetic Loop Tuner 80-20mAnonymous yd3nqGC100% (2)
- GSM SignalingДокумент11 страницGSM SignalingAmruthVarmaОценок пока нет
- Motorized Butterfly Valve Actuator: On/Off Control & Modulating ControlДокумент5 страницMotorized Butterfly Valve Actuator: On/Off Control & Modulating Controlmohamad chaudhariОценок пока нет
- Tempo2 - One-Shot/Test Timer: OverviewДокумент4 страницыTempo2 - One-Shot/Test Timer: OverviewLuis Enrique Antonio del AngelОценок пока нет
- WWW - MK-Electronic - De: FRU (Field Replaceable Unit) ListДокумент7 страницWWW - MK-Electronic - De: FRU (Field Replaceable Unit) ListCarlos EduardoОценок пока нет
- FUNAI PLF-76 Service ManualДокумент40 страницFUNAI PLF-76 Service Manualapi-3711045Оценок пока нет
- CMC156$DatasheetДокумент4 страницыCMC156$DatasheetLam Duy TienОценок пока нет
- RU1H140R: N-Channel Advanced Power MOSFETДокумент8 страницRU1H140R: N-Channel Advanced Power MOSFETJose Manuel Campo RodriguezОценок пока нет
- Manuale-Sellaii It-Rev00 Faro SterДокумент8 страницManuale-Sellaii It-Rev00 Faro Steryasser el aliОценок пока нет
- Training Report Electrical NFL BathindaДокумент26 страницTraining Report Electrical NFL BathindaManjotBrar100% (2)
- CMZ General CatalogueДокумент31 страницаCMZ General CatalogueKaan CanОценок пока нет
- Elex Experiment 1Документ3 страницыElex Experiment 1Jotaro KujoОценок пока нет
- PS18/28/35/38/48 Series Iii Bass Module Dsp/Amp Boardpcb P/N 309887 Rev 01 Sheet 1 of 12Документ14 страницPS18/28/35/38/48 Series Iii Bass Module Dsp/Amp Boardpcb P/N 309887 Rev 01 Sheet 1 of 12Sv KoОценок пока нет
- S40 Series: Microprocessor-Based Miniature SensorsДокумент4 страницыS40 Series: Microprocessor-Based Miniature Sensorsrogerio barbosa comamОценок пока нет
- Company Profile Product PortfolioДокумент15 страницCompany Profile Product PortfolioEjaz EjazОценок пока нет
- Android Controlled Notice Board: Prof. Neha TiwariДокумент4 страницыAndroid Controlled Notice Board: Prof. Neha TiwariNayan SolanKiОценок пока нет
- Ad7323 PDFДокумент36 страницAd7323 PDFHugo Fabian AlanizОценок пока нет
- 12.hxtd8xy16065t0a - 2600m 8t8r FiberhomeДокумент2 страницы12.hxtd8xy16065t0a - 2600m 8t8r Fiberhomejaager1985Оценок пока нет
- Yamaha Tss 15 Owner S ManualДокумент23 страницыYamaha Tss 15 Owner S ManualBJkunОценок пока нет