Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Environmental Tobacco Smoke ReportДокумент73 страницыEnvironmental Tobacco Smoke ReportKlydeJoseОценок пока нет
- Exp 1 DC Shunt GeneratorДокумент13 страницExp 1 DC Shunt GeneratorKlydeJoseОценок пока нет
- Toxigenic Fungi in The Indoor EnvironmentДокумент55 страницToxigenic Fungi in The Indoor EnvironmentKlydeJoseОценок пока нет
- Latex Group 1Документ52 страницыLatex Group 1KlydeJoseОценок пока нет
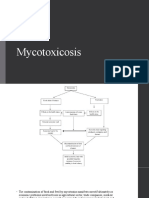
- MycotoxicosisДокумент13 страницMycotoxicosisKlydeJoseОценок пока нет
- Experiment 7 FinalsДокумент8 страницExperiment 7 FinalsKlydeJoseОценок пока нет
- Exp 5 DC Series MotorДокумент5 страницExp 5 DC Series MotorKlydeJoseОценок пока нет
- FINAL GELO Drawing v2 PDFДокумент6 страницFINAL GELO Drawing v2 PDFKlydeJoseОценок пока нет
- Final Celeb Plate PDFДокумент4 страницыFinal Celeb Plate PDFKlydeJoseОценок пока нет
- QUITO PLATE Drawing v2 PDFДокумент4 страницыQUITO PLATE Drawing v2 PDFKlydeJoseОценок пока нет
- Jose 7/20/2019: Drawn Checked QA MFG Approved DWG No TitleДокумент1 страницаJose 7/20/2019: Drawn Checked QA MFG Approved DWG No TitleKlydeJoseОценок пока нет
- SFTY100 QuestionsДокумент3 страницыSFTY100 QuestionsKlydeJoseОценок пока нет
- Exp4 Ee22lДокумент1 страницаExp4 Ee22lKlydeJoseОценок пока нет
- ME198D Exercises PDFДокумент5 страницME198D Exercises PDFKlydeJoseОценок пока нет
- Majority Answer: YesДокумент2 страницыMajority Answer: YesKlydeJoseОценок пока нет
- Ideal Gas ProcessesДокумент6 страницIdeal Gas ProcessesKlydeJoseОценок пока нет
- Input OutputДокумент1 страницаInput OutputKlydeJoseОценок пока нет
- Experimental Investigation of Small-Scale Gasification of Woody BiomassДокумент2 страницыExperimental Investigation of Small-Scale Gasification of Woody BiomassKlydeJoseОценок пока нет
- EMG20 Documentary InterviewДокумент1 страницаEMG20 Documentary InterviewKlydeJoseОценок пока нет
- Table 1. Comparison Between The GCI of Philippines, Japan, Argentina. (Excerpt From The World Economic Forum, 2018)Документ2 страницыTable 1. Comparison Between The GCI of Philippines, Japan, Argentina. (Excerpt From The World Economic Forum, 2018)KlydeJoseОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Best Electronic Circuit ProjectsДокумент20 страницBest Electronic Circuit ProjectsGratiela VodaОценок пока нет
- HT9170B/HT9170D DTMF Receiver: FeaturesДокумент14 страницHT9170B/HT9170D DTMF Receiver: FeaturesjanepriceОценок пока нет
- Electrolyte Analyzer H900 Operation ManualДокумент44 страницыElectrolyte Analyzer H900 Operation ManualSIELAB C.A.Оценок пока нет
- ISDN (Integrated Services DigitalДокумент47 страницISDN (Integrated Services DigitalPriyadarshini PatilОценок пока нет
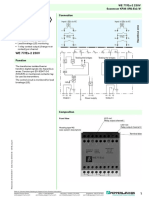
- We 77/ex-2 230V: Input I Eex Ia Iic Input Ii Eex Ia IicДокумент3 страницыWe 77/ex-2 230V: Input I Eex Ia Iic Input Ii Eex Ia IicMohammad HosseinОценок пока нет
- Analog by PspiceДокумент489 страницAnalog by PspiceRahul AlhanОценок пока нет
- ELEC3206 Lab 1 3-ph TransformerДокумент7 страницELEC3206 Lab 1 3-ph TransformermaxОценок пока нет
- Hardik P Vaidya: Electrical EngineerДокумент4 страницыHardik P Vaidya: Electrical Engineeraman vaidyaОценок пока нет
- AP Transco Previous Question PapersДокумент2 страницыAP Transco Previous Question PapersRohan SharmaОценок пока нет
- Power Amplifier Applications: Absolute Maximum RatingsДокумент5 страницPower Amplifier Applications: Absolute Maximum RatingsEsmir MarinОценок пока нет
- JHB HV MV CIRCUIT BREAKER SEMINAR MANUAL Feb 2017 PDFДокумент367 страницJHB HV MV CIRCUIT BREAKER SEMINAR MANUAL Feb 2017 PDFTommy TomzОценок пока нет
- Martin Audio Em56Документ5 страницMartin Audio Em56Adina PredaОценок пока нет
- Bab 7 - 1Документ18 страницBab 7 - 1Ivan FadillahОценок пока нет
- KW600 User ManualДокумент31 страницаKW600 User ManualSantiago OviedoОценок пока нет
- Module 3 LCAPRДокумент13 страницModule 3 LCAPRBabbu DograОценок пока нет
- Impact AC/DC-6 Gang ChargerДокумент1 страницаImpact AC/DC-6 Gang Chargerdonald_wilson4741Оценок пока нет
- PSP300 IntertekДокумент6 страницPSP300 IntertekJames Wayne BarkerОценок пока нет
- RER620 IEC 101-104 Point List ManualДокумент52 страницыRER620 IEC 101-104 Point List ManualkatheОценок пока нет
- Apc Ups ManualДокумент1 страницаApc Ups ManualgodinezjeffreyjОценок пока нет
- Propeller DisplayДокумент39 страницPropeller DisplayAswathy ChandranОценок пока нет
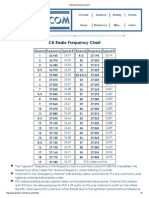
- CB Band Frequency Chart PDFДокумент2 страницыCB Band Frequency Chart PDFdeyede2003Оценок пока нет
- Leaflet Natural RefrigerantsДокумент2 страницыLeaflet Natural RefrigerantsAmic BanatОценок пока нет
- ART VPM FAQ Handbook Iss HДокумент38 страницART VPM FAQ Handbook Iss HAzwan ShahmeeОценок пока нет
- RC Circuit LabДокумент3 страницыRC Circuit LabSail338Оценок пока нет
- AMP2 S8 MDA - DДокумент4 страницыAMP2 S8 MDA - DaboediartoОценок пока нет
- COMMNG-ELEC-053 PMCC Charging ProcedureДокумент3 страницыCOMMNG-ELEC-053 PMCC Charging ProceduresantoshkumarОценок пока нет
- Syllabus For IES: Indian Engineering Services ExaminationДокумент26 страницSyllabus For IES: Indian Engineering Services ExaminationGopal JhaОценок пока нет
- Bta 40600 BДокумент6 страницBta 40600 BesamОценок пока нет
- Emi Queations and BitsДокумент20 страницEmi Queations and BitsSuresh ChОценок пока нет
- Additional Material ch3 PDFДокумент5 страницAdditional Material ch3 PDFbiju mathewОценок пока нет