Вам также может понравиться
- Computer Application in BusinessДокумент45 страницComputer Application in BusinessABIN THOMASОценок пока нет
- Ch02 AVR ArchitectureДокумент20 страницCh02 AVR ArchitectureSabitОценок пока нет
- Atmega128 I/O Ports: VersusДокумент16 страницAtmega128 I/O Ports: VersusZoranОценок пока нет
- and ARMДокумент4 страницыand ARMAnonymous ZWlMl4pxaОценок пока нет
- Lecture 1: Introduction To ARM Based Embedded SystemsДокумент24 страницыLecture 1: Introduction To ARM Based Embedded SystemsSaurabh HedaОценок пока нет
- Thermal Power Plant: Study On Master Fuel TripДокумент21 страницаThermal Power Plant: Study On Master Fuel TripManiswari Mothukuru100% (2)
- Thermal Power Plant: Study On Master Fuel TripДокумент21 страницаThermal Power Plant: Study On Master Fuel TripManiswari Mothukuru100% (2)
- ARM Architecture - L5Документ7 страницARM Architecture - L5Maniswari MothukuruОценок пока нет
- ARM Architecture - L5Документ7 страницARM Architecture - L5Maniswari MothukuruОценок пока нет
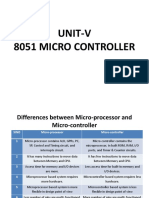
- 8051 MicrocontrollerДокумент31 страница8051 MicrocontrollerRadha RaniОценок пока нет
- ARM Interrupt ProcessingДокумент33 страницыARM Interrupt Processinglovet essampongОценок пока нет
- ARM Introduction & Instruction Set ArchitectureДокумент71 страницаARM Introduction & Instruction Set ArchitecturebalaОценок пока нет
- ARM Cortex M3 RegistersДокумент22 страницыARM Cortex M3 RegistersRaveendra Moodithaya100% (2)
- Microcontroller and Embedded SystemsДокумент2 страницыMicrocontroller and Embedded SystemsIndranilОценок пока нет
- Arm BasicsДокумент26 страницArm BasicsManoah JayakaranОценок пока нет
- Arm ProcessorДокумент18 страницArm ProcessorashokОценок пока нет
- (Lecture-07) The Thumb Instruction SetsДокумент22 страницы(Lecture-07) The Thumb Instruction SetsSuresh KumarОценок пока нет
- 1B30 07Документ542 страницы1B30 07saОценок пока нет
- LPC2148 ARM7 MicrocontrollerДокумент80 страницLPC2148 ARM7 MicrocontrollerChhaya Sharma100% (3)
- Manual Rele GE F35Документ358 страницManual Rele GE F35Clint Sawyer100% (1)
- Final 8051 PrintoutДокумент78 страницFinal 8051 PrintoutArun JyothiОценок пока нет
- ArmДокумент44 страницыArmSiva SankaranОценок пока нет
- Embedded System Architecture SlidesДокумент40 страницEmbedded System Architecture SlidesKiran Tk100% (1)
- 3 Cooper Form6 S280703 10000 PDFДокумент56 страниц3 Cooper Form6 S280703 10000 PDFNader Asgar Pangarungan MamarobaОценок пока нет
- Advanced RISC Machine-ARM Notes BhurchandiДокумент8 страницAdvanced RISC Machine-ARM Notes BhurchandiVipin TiwariОценок пока нет
- The ARM ProcessorДокумент24 страницыThe ARM ProcessorJinto Chacko Mathew100% (2)
- Advanced Arm Processors: Ch. S. V. Maruthi Rao Associate Professor Department of ECE, S. I. E. TДокумент27 страницAdvanced Arm Processors: Ch. S. V. Maruthi Rao Associate Professor Department of ECE, S. I. E. TMaruthi RaoОценок пока нет
- Accident Detection and Alert System Based On ARM7 MicrocontrollerДокумент4 страницыAccident Detection and Alert System Based On ARM7 MicrocontrollersophiyasharanОценок пока нет
- ARM 4 Part2Документ9 страницARM 4 Part2SUGYAN ANAND MAHARANAОценок пока нет
- MPMC Unit 4Документ23 страницыMPMC Unit 4KvnsumeshChandraОценок пока нет
- ARM Organization and Implementation: Aleksandar MilenkovicДокумент37 страницARM Organization and Implementation: Aleksandar Milenkovicarthicse100% (1)
- MCB2300 CanДокумент14 страницMCB2300 CanMichaelОценок пока нет
- Basic ARM9 Block DiagramДокумент2 страницыBasic ARM9 Block Diagramhumtum_shriОценок пока нет
- 2 MarksДокумент30 страниц2 MarksAnitha Kumari SivathanuОценок пока нет
- Microcontrollers and Embedded SystemsДокумент35 страницMicrocontrollers and Embedded SystemsTarek BarhoumОценок пока нет
- LPC1768 GPIO Programming TutorialДокумент5 страницLPC1768 GPIO Programming Tutorialsiva kumaarОценок пока нет
- 8051 - Micro ControllersДокумент33 страницы8051 - Micro ControllersRijo Jackson TomОценок пока нет
- Modified Embedded Processors - TE (E&TC) PDFДокумент4 страницыModified Embedded Processors - TE (E&TC) PDFbalaji_gawalwad9857Оценок пока нет
- Millman Halkias - Integrated ElectronicsДокумент28 страницMillman Halkias - Integrated ElectronicsPranav SinhaОценок пока нет
- AP Unit 3Документ133 страницыAP Unit 3harshad lokhandeОценок пока нет
- Motor m49sp 1 eДокумент2 страницыMotor m49sp 1 eRené Isaac Martínez OlivaОценок пока нет
- 02 ARM Processor FundamentalsДокумент65 страниц02 ARM Processor Fundamentalsbengaltiger100% (2)
- ARM7TDMI ProcessorДокумент44 страницыARM7TDMI Processormuralik_64Оценок пока нет
- Question Bank of Computer NetworkДокумент1 страницаQuestion Bank of Computer NetworkonesnoneОценок пока нет
- Ntroduction To ARM7 LPC2148 MicrocontrollerДокумент5 страницNtroduction To ARM7 LPC2148 MicrocontrollercaseguysОценок пока нет
- Features of 8086Документ31 страницаFeatures of 8086Ngaa SiemensОценок пока нет
- Chapter-5: Assembly Language Programming Using 8086 (16 Marks)Документ55 страницChapter-5: Assembly Language Programming Using 8086 (16 Marks)PRABHAKAR MOREОценок пока нет
- Answers of Microprocessor (8085) & Electronics FAQДокумент21 страницаAnswers of Microprocessor (8085) & Electronics FAQsoumyadev100% (23)
- Ee6008 Microcontroller Based System Designl Question BankДокумент4 страницыEe6008 Microcontroller Based System Designl Question BankAnbalagan GuruОценок пока нет
- 8 Bit ALU by XilinxДокумент16 страниц8 Bit ALU by XilinxDIPTANU MAJUMDERОценок пока нет
- DSP - Mod 6 PPT 1Документ37 страницDSP - Mod 6 PPT 1oxygen oxygenОценок пока нет
- 8,16,32 Floating Point Processing in ARMДокумент25 страниц8,16,32 Floating Point Processing in ARMOMKAR BHILARE100% (1)
- Risc PropertiesДокумент2 страницыRisc PropertiesSwetha RamОценок пока нет
- 18CS44 Model Question Paper-1 With Effect From 2019-20 (CBCS Scheme)Документ2 страницы18CS44 Model Question Paper-1 With Effect From 2019-20 (CBCS Scheme)M.A rajaОценок пока нет
- Processor Architecture and Interfacing: Part 13: The 8255 PPIДокумент24 страницыProcessor Architecture and Interfacing: Part 13: The 8255 PPIPalash ParmarОценок пока нет
- How To Interfacing Sensor With LPC2148 ARMДокумент8 страницHow To Interfacing Sensor With LPC2148 ARMSubir MaityОценок пока нет
- Lab Report FpgaДокумент34 страницыLab Report FpgaMuhammad Furqan JavedОценок пока нет
- WWW Icverification Com BusProtocols AmbaOverview PHPДокумент5 страницWWW Icverification Com BusProtocols AmbaOverview PHPmsk123123Оценок пока нет
- 8086 Interview Questions:: 8086 MicroprocessorДокумент20 страниц8086 Interview Questions:: 8086 MicroprocessorHamid FarhanОценок пока нет
- 8051 Timer CounterДокумент8 страниц8051 Timer Countermuralimunraj100% (1)
- Block Diagram of Intel 8086Документ5 страницBlock Diagram of Intel 8086Ritesh SinghОценок пока нет
- Arm Program ModelДокумент4 страницыArm Program ModelvlkumashankardeekshithОценок пока нет
- Implementing Communication Bridge Between I2C and APBДокумент4 страницыImplementing Communication Bridge Between I2C and APBDon RajuОценок пока нет
- Application-Specific Integrated Circuit ASIC A Complete GuideОт EverandApplication-Specific Integrated Circuit ASIC A Complete GuideОценок пока нет
- An Introduction To ARM Architecture With Each ModuleДокумент6 страницAn Introduction To ARM Architecture With Each ModuleAnusha PadmavathiОценок пока нет
- Presented by M Rahul Chandra Roll Number 11603027: Thermal Power StationДокумент20 страницPresented by M Rahul Chandra Roll Number 11603027: Thermal Power StationManiswari MothukuruОценок пока нет
- Computer ApplicationДокумент13 страницComputer Applications.sujatha100% (1)
- Blueprism QuestionsДокумент24 страницыBlueprism Questionsdhivya2451989Оценок пока нет
- SRSДокумент12 страницSRSthorarjun4Оценок пока нет
- Fintek F71882F DatasheetДокумент130 страницFintek F71882F DatasheetAda Csaba100% (2)
- Diagnostic Test Icf 7Документ1 страницаDiagnostic Test Icf 7Sheine Nasayao MatosОценок пока нет
- User Manual: HMC9000A Diesel Engine ControllerДокумент46 страницUser Manual: HMC9000A Diesel Engine ControllerArc HieОценок пока нет
- Onvert EB Into Obile Apps Platform: Alveetech CO MДокумент18 страницOnvert EB Into Obile Apps Platform: Alveetech CO Milias ahmedОценок пока нет
- 2 - XP Communication English V2.2Документ318 страниц2 - XP Communication English V2.2Luis Fernando JesusОценок пока нет
- Advanced IctДокумент313 страницAdvanced IctYonaОценок пока нет
- Mach3 USB Motion Card (SW43B) Installation ManualДокумент35 страницMach3 USB Motion Card (SW43B) Installation ManualNorberto RadererОценок пока нет
- ICDL Theory AssignmentДокумент3 страницыICDL Theory AssignmentFarai ManjoОценок пока нет
- Scara Teach Manual DeltaДокумент92 страницыScara Teach Manual DeltaCristobal PerezОценок пока нет
- Getting Started With Mapp Documentation Br3o23xbДокумент42 страницыGetting Started With Mapp Documentation Br3o23xbFrancescoОценок пока нет
- Technical Product Guide Trident v3 May 2016Документ64 страницыTechnical Product Guide Trident v3 May 2016Gabriel DpdОценок пока нет
- WQCOSM Users Manual 2013Документ19 страницWQCOSM Users Manual 2013sirshawОценок пока нет
- Lecture67 PDFДокумент9 страницLecture67 PDFpragyanОценок пока нет
- Mini Project ReportДокумент9 страницMini Project ReportSandesh KaleОценок пока нет
- BeagleBone and Software Development Using C++ PDFДокумент2 страницыBeagleBone and Software Development Using C++ PDFEdgar GuarecucoОценок пока нет
- Installing The Virtual I/O Server by Using The HMC Version 7 Release 7.7, or LaterДокумент3 страницыInstalling The Virtual I/O Server by Using The HMC Version 7 Release 7.7, or LatersreenivasanОценок пока нет
- Computer Organization andДокумент50 страницComputer Organization andSowmiya SplendiferousОценок пока нет
- g915 g913 TKL QSGДокумент333 страницыg915 g913 TKL QSGPatrick SimonОценок пока нет
- C Language Unit 1,2,3,4,5Документ247 страницC Language Unit 1,2,3,4,5Lovely VasanthОценок пока нет
- Computer Mcqs-1Документ41 страницаComputer Mcqs-1Jou JouОценок пока нет
- General Specifications: Model DY Model DYA Vortex FlowmeterДокумент34 страницыGeneral Specifications: Model DY Model DYA Vortex FlowmeterDandy Harris FirdiandaОценок пока нет
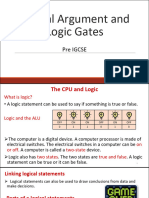
- Logical Argument and Logic Gates (P)Документ32 страницыLogical Argument and Logic Gates (P)Htet Wai Yan AungОценок пока нет
- Direct Memory AccessДокумент3 страницыDirect Memory AccessAmisha SinghОценок пока нет