Вам также может понравиться
- A Trading System Development Tutorial For The Amibroker Stock Charting/Analysis ProgramДокумент22 страницыA Trading System Development Tutorial For The Amibroker Stock Charting/Analysis ProgramMadhukar Reddy Narahari100% (2)
- Zero Lag Data Smoothers: Figure 1. Steady State Lag CompensationДокумент8 страницZero Lag Data Smoothers: Figure 1. Steady State Lag Compensationnanaa0100% (2)
- Friction Loss in PipeДокумент12 страницFriction Loss in Pipenextdarklord50% (2)
- John Ehlers - TheInverseFisherTransform PDFДокумент5 страницJohn Ehlers - TheInverseFisherTransform PDFArc Angel MОценок пока нет
- This Study Resource Was: Quiz 3Документ5 страницThis Study Resource Was: Quiz 3Nagarajan Thandayutham100% (1)
- Crash Course Coding CompanionДокумент136 страницCrash Course Coding Companionwarp gateОценок пока нет
- Hole Size DP Length DP Od DP Id DC Length DC Od DC Id Density of Mud VP (QT) 1 1 2 3 AreaДокумент9 страницHole Size DP Length DP Od DP Id DC Length DC Od DC Id Density of Mud VP (QT) 1 1 2 3 AreamehmetОценок пока нет
- Hydraulic Jump LabДокумент17 страницHydraulic Jump LabAdrian Mufc Rampersad100% (1)
- Mama - The Mother of Adaptive Moving Averages: John Ehlers, "Phasor Displays", Stocks & Commodities, Dec 2000, PP 19Документ6 страницMama - The Mother of Adaptive Moving Averages: John Ehlers, "Phasor Displays", Stocks & Commodities, Dec 2000, PP 19Pinky BhagwatОценок пока нет
- 5EMAs AdvancedДокумент5 страниц5EMAs AdvancedMrugenОценок пока нет
- Vent CalcДокумент5 страницVent CalcVictor ValenciaОценок пока нет
- Diffuse Algorithms for Neural and Neuro-Fuzzy Networks: With Applications in Control Engineering and Signal ProcessingОт EverandDiffuse Algorithms for Neural and Neuro-Fuzzy Networks: With Applications in Control Engineering and Signal ProcessingОценок пока нет
- Gaussian FiltersДокумент8 страницGaussian FiltersJanОценок пока нет
- Control Systems Laboratory: Hamza OSAMA &haider Jamal&salah MahdiДокумент27 страницControl Systems Laboratory: Hamza OSAMA &haider Jamal&salah MahdiAhmed Mohammed khalfОценок пока нет
- Rain Water Basin DesignДокумент11 страницRain Water Basin DesignSturza AnastasiaОценок пока нет
- Intrumentation Lab#5Документ7 страницIntrumentation Lab#5Ahsan IjazОценок пока нет
- Assignm 3Документ3 страницыAssignm 3Luis Bellido C.Оценок пока нет
- Spectrum of A Digital SignalДокумент11 страницSpectrum of A Digital SignalMohlalaОценок пока нет
- Department of Physics and Astrophysics: (Amplifiers)Документ36 страницDepartment of Physics and Astrophysics: (Amplifiers)Ayush PurwarОценок пока нет
- Conversions & CalculationsДокумент9 страницConversions & CalculationsJorge Emilio MorenoОценок пока нет
- 2 Entrega - GabaritoДокумент21 страница2 Entrega - GabaritoÁlvaro Amitai Livramento SantosОценок пока нет
- Gauss-Kronrod Integration For Rectangular Closed Conduits: P. Gruber, T. Staubli, F. FahrniДокумент13 страницGauss-Kronrod Integration For Rectangular Closed Conduits: P. Gruber, T. Staubli, F. FahrniFlorinОценок пока нет
- Per Did As Final 2013Документ68 страницPer Did As Final 2013Juan Diego Garcia HanccoОценок пока нет
- GCM 03Документ2 страницыGCM 03Srinivas KadivetiОценок пока нет
- TheisMatchFt ComДокумент21 страницаTheisMatchFt ComBarbu IonelОценок пока нет
- Flow Meter Orifice CalculationДокумент27 страницFlow Meter Orifice CalculationLaksono BudiОценок пока нет
- BIOFARrrДокумент3 страницыBIOFARrrFilzah Falvika PutriОценок пока нет
- 3 ShaftДокумент16 страниц3 ShaftSuresh CОценок пока нет
- GridDataReport BismillahДокумент7 страницGridDataReport BismillahEka Putri JuliantiОценок пока нет
- Experiment No. 7 Name of The Experiment: RC Frequency ResponseДокумент8 страницExperiment No. 7 Name of The Experiment: RC Frequency ResponseMitrayosna MishraОценок пока нет
- Inflasi ARIMA ModelДокумент7 страницInflasi ARIMA ModelAnto TomodachiRent SusiloОценок пока нет
- 1 Entrega ComentadaДокумент17 страниц1 Entrega ComentadaÁlvaro Amitai Livramento SantosОценок пока нет
- Calculation For Elongatioin of CablesДокумент13 страницCalculation For Elongatioin of Cablesmahmoud elkhedrОценок пока нет
- Analog Lab ReportДокумент9 страницAnalog Lab ReportGayank NegiОценок пока нет
- Tugas Salin Nadhia PDFДокумент20 страницTugas Salin Nadhia PDFNadhia Syafira AОценок пока нет
- R/Rmin R φ (N) N N,real V Qc (kcal/h) Qr FДокумент11 страницR/Rmin R φ (N) N N,real V Qc (kcal/h) Qr FJonathan MckinneyОценок пока нет
- Polar Plot of Feedback Against Frequency For Single - and Double Pole FeedbackДокумент9 страницPolar Plot of Feedback Against Frequency For Single - and Double Pole FeedbackRanjeet Kumar VermaОценок пока нет
- EE416 - Lab#3 - Phase and Group Velocity - EditedДокумент9 страницEE416 - Lab#3 - Phase and Group Velocity - Editedvincentnanai101Оценок пока нет
- Set-I AnswerДокумент9 страницSet-I Answershivansh gandhiОценок пока нет
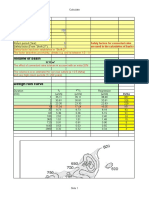
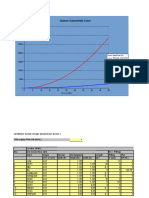
- System Characteristic Curve: Flow (m3/s)Документ5 страницSystem Characteristic Curve: Flow (m3/s)konticvОценок пока нет
- ReportДокумент16 страницReportmariana.wintakefireОценок пока нет
- System Characteristic Curve: Flow (m3/s)Документ5 страницSystem Characteristic Curve: Flow (m3/s)ahmed nawazОценок пока нет
- Vent CalcДокумент5 страницVent CalcMichael LagundinoОценок пока нет
- BS SRR-3Документ20 страницBS SRR-3anveshvarma365Оценок пока нет
- Libro 1Документ6 страницLibro 1edwin montes67Оценок пока нет
- RF ImpedanceДокумент7 страницRF ImpedancesrybsantosОценок пока нет
- Gridding Report - : Data SourceДокумент7 страницGridding Report - : Data SourceÉrikka JohannaОценок пока нет
- Welcome To "Rte-Book1Ddeltanorm - XLS" Calculator For 1D Subaerial Fluvial Fan-Delta With Channel of Constant WidthДокумент23 страницыWelcome To "Rte-Book1Ddeltanorm - XLS" Calculator For 1D Subaerial Fluvial Fan-Delta With Channel of Constant WidthsteveОценок пока нет
- EMF ResultsДокумент6 страницEMF ResultsRaghbendra JhaОценок пока нет
- Cross Validation Report - : Data SourceДокумент5 страницCross Validation Report - : Data SourceANDREA DENISSEОценок пока нет
- System Characteristic Curve: Flow (m3/s)Документ5 страницSystem Characteristic Curve: Flow (m3/s)Raj DhuriОценок пока нет
- GridDataReport-KEL.5 FIXДокумент7 страницGridDataReport-KEL.5 FIXPace BesarОценок пока нет
- Name: Bearing Roll No Design Case:: Given Process /operating ConditionsДокумент6 страницName: Bearing Roll No Design Case:: Given Process /operating ConditionsIffatОценок пока нет
- GridDataReport-data Dat Ubah KrigingДокумент7 страницGridDataReport-data Dat Ubah KrigingIntan YogiОценок пока нет
- X-Ray Diffraction: Lab ReportДокумент16 страницX-Ray Diffraction: Lab ReportFikan Mubarok RohimsyahОценок пока нет
- Incendiu - SprinklereДокумент8 страницIncendiu - SprinklereimepsystemsОценок пока нет
- ElL 304 Lab2 ReportДокумент9 страницElL 304 Lab2 ReportGayank NegiОценок пока нет
- 300 Kelvin After Reached EqulibriumДокумент3 страницы300 Kelvin After Reached EqulibriumNavin Kumar (B21MT022)Оценок пока нет
- Exp of Darcy-WeisbachДокумент3 страницыExp of Darcy-Weisbachnur azraОценок пока нет
- RTe BookAgDegNormalSubДокумент21 страницаRTe BookAgDegNormalSubsteveОценок пока нет
- Gy LN - Pib - Lag1 LN - N - Delta lnk3 Lneduc Lnhom - JovensДокумент22 страницыGy LN - Pib - Lag1 LN - N - Delta lnk3 Lneduc Lnhom - JovensMarcus SarmentoОценок пока нет
- Variable Descripción Valor Fórmula Unidades Mu: (µ) Rho: (ρ) Gamma: (γ) p sat p atm g L asp D Q A Epsilon: (ε) ε/D V Re Calculo De Potencia De La Bomba Ecuacion de Colebrook fДокумент8 страницVariable Descripción Valor Fórmula Unidades Mu: (µ) Rho: (ρ) Gamma: (γ) p sat p atm g L asp D Q A Epsilon: (ε) ε/D V Re Calculo De Potencia De La Bomba Ecuacion de Colebrook fNicolas MojicaОценок пока нет
- Gridding Report - : Data SourceДокумент7 страницGridding Report - : Data Source161TPB1Mayang Sukma HardikaОценок пока нет
- 20nov PDFДокумент20 страниц20nov PDFgianni moiОценок пока нет
- MonthlyBudget BasicFormulas 01Документ1 страницаMonthlyBudget BasicFormulas 01Pinky BhagwatОценок пока нет
- Swing Trade Pro 2.0: The 5-Step Swing Trading BlueprintДокумент15 страницSwing Trade Pro 2.0: The 5-Step Swing Trading BlueprintPinky BhagwatОценок пока нет
- Understanding Dynamic, Volatility-Adjusted Momentum: A Introduction To Newfound'S Flagship Tactical Investment ModelДокумент10 страницUnderstanding Dynamic, Volatility-Adjusted Momentum: A Introduction To Newfound'S Flagship Tactical Investment ModelPinky BhagwatОценок пока нет
- D Ifta Journal 02Документ32 страницыD Ifta Journal 02fredОценок пока нет
- Evaluating System Efficiency: Money ManagementДокумент4 страницыEvaluating System Efficiency: Money ManagementPinky BhagwatОценок пока нет
- HybridfiltersДокумент9 страницHybridfiltersPinky BhagwatОценок пока нет
- The Inverse Fisher Transform by John EhlersДокумент5 страницThe Inverse Fisher Transform by John EhlersPinky BhagwatОценок пока нет
- MonthlyBudget 01Документ1 страницаMonthlyBudget 01Pinky BhagwatОценок пока нет
- Inferring Trading Strategies From Probability Distribution FunctionsДокумент16 страницInferring Trading Strategies From Probability Distribution FunctionsvidmantoОценок пока нет
- Fourier Transform For TradersДокумент10 страницFourier Transform For TradersPinky BhagwatОценок пока нет
- 2008 Traders ExpoДокумент42 страницы2008 Traders ExpoPinky BhagwatОценок пока нет
- Inferringstrategies PDFДокумент15 страницInferringstrategies PDFPinky BhagwatОценок пока нет
- Fouriertransforms PDFДокумент10 страницFouriertransforms PDFPinky BhagwatОценок пока нет
- FRAMA D'origineДокумент5 страницFRAMA D'originebali123aОценок пока нет
- Zero Lag: Jack Hutson, "Stocks & Commodities", (Elizabeth, Please Help With This - My Guess Is 1982-1984)Документ8 страницZero Lag: Jack Hutson, "Stocks & Commodities", (Elizabeth, Please Help With This - My Guess Is 1982-1984)Pinky BhagwatОценок пока нет
- Using The Fisher TransformДокумент6 страницUsing The Fisher Transformchristianp3Оценок пока нет
- What's The Difference? by John EhlersДокумент3 страницыWhat's The Difference? by John EhlersPinky BhagwatОценок пока нет
- System Performance Evaluation: Extracted From Chapter 15 of "Cybernetic Analysis For Stocks and Futures", John WileyДокумент1 страницаSystem Performance Evaluation: Extracted From Chapter 15 of "Cybernetic Analysis For Stocks and Futures", John WileyTraderCat SolarisОценок пока нет
- FRAMA - Fractal Adaptive Moving Average by John Ehlers: S S N NДокумент5 страницFRAMA - Fractal Adaptive Moving Average by John Ehlers: S S N NPinky BhagwatОценок пока нет
- TimewarpДокумент7 страницTimewarpPinky BhagwatОценок пока нет
- The CG OscillatorДокумент4 страницыThe CG OscillatorhemsvgОценок пока нет
- New Developments in Amibroker: by Tomasz JaneczkoДокумент39 страницNew Developments in Amibroker: by Tomasz JaneczkoPinky BhagwatОценок пока нет
- Report of 13233 KV Gss Banka NewДокумент1 страницаReport of 13233 KV Gss Banka NewPinky BhagwatОценок пока нет
- Fractal Formation and Trend Trading Strategy in Futures MarketДокумент5 страницFractal Formation and Trend Trading Strategy in Futures MarketPinky BhagwatОценок пока нет
- Writeup 3D PerceptionДокумент21 страницаWriteup 3D Perceptiongoutam guptaОценок пока нет
- Descartes Rule of SignsДокумент4 страницыDescartes Rule of Signsfrancel floresОценок пока нет
- Evaluation of Deep Learning Models For Multi-Step Ahead Time Series PredictionДокумент22 страницыEvaluation of Deep Learning Models For Multi-Step Ahead Time Series PredictionDinibel PérezОценок пока нет
- System of Linear EquationsДокумент4 страницыSystem of Linear EquationsSAGI RATHNA PRASAD me14d210Оценок пока нет
- Echo Cancellation Project ProposalДокумент2 страницыEcho Cancellation Project ProposalmidhunОценок пока нет
- OQM Lecture Note - Part 1 Introduction To Mathematical OptimisationДокумент10 страницOQM Lecture Note - Part 1 Introduction To Mathematical OptimisationdanОценок пока нет
- Control SystemsДокумент25 страницControl SystemsNandigam Chandu ChowdaryОценок пока нет
- Xavier College Topic - Binomial TheoremДокумент1 страницаXavier College Topic - Binomial TheoremRupesh KumarОценок пока нет
- Lab Manaual 08: Z-Transform and Inverse Z-Transform AnalysisДокумент8 страницLab Manaual 08: Z-Transform and Inverse Z-Transform AnalysisEngr Haseena JabbarОценок пока нет
- Optimality Conditions in Nonlinear Optimization: I I N I N I NДокумент1 страницаOptimality Conditions in Nonlinear Optimization: I I N I N I NrohitashavОценок пока нет
- Matlab Implementation of Reverberation AlgorithmsДокумент6 страницMatlab Implementation of Reverberation AlgorithmsJo E Fran RodriguesОценок пока нет
- Ch6 Open - Methods 10 10 2010Документ47 страницCh6 Open - Methods 10 10 2010No RaimaОценок пока нет
- 006 - BCS-042 D18 - Compressed PDFДокумент4 страницы006 - BCS-042 D18 - Compressed PDFPawan SahuОценок пока нет
- Deadlock in OSДокумент43 страницыDeadlock in OSRamin Khalifa WaliОценок пока нет
- MAFE208IU-L7 InterpolationДокумент35 страницMAFE208IU-L7 InterpolationThy VũОценок пока нет
- Grade 9 Written Work 1-1Документ2 страницыGrade 9 Written Work 1-1Arela Jane TumulakОценок пока нет
- Com124 Data Structure Note-1-1Документ30 страницCom124 Data Structure Note-1-1Godfrey MosesОценок пока нет
- Lecture 4 - Fourier Transform (Slides)Документ17 страницLecture 4 - Fourier Transform (Slides)radians042Оценок пока нет
- Experiment-3: Convolution: Signals and Systems Lab (EC2P002)Документ4 страницыExperiment-3: Convolution: Signals and Systems Lab (EC2P002)GAUTAM BUBNAОценок пока нет
- BEE 4413 Exercise 1Документ4 страницыBEE 4413 Exercise 1Hafzn HashimОценок пока нет
- Ordinary Differential EquationsДокумент8 страницOrdinary Differential EquationsMülügêtá HãilêОценок пока нет
- 09 Informed SearchДокумент18 страниц09 Informed SearchTeddy MwangiОценок пока нет
- Here Is A Pascal Program To Solve Small Problems Using The Simplex AlgorithmДокумент12 страницHere Is A Pascal Program To Solve Small Problems Using The Simplex AlgorithmRodolfo Sergio Cruz FuentesОценок пока нет
- Project 3 - CS 146Документ5 страницProject 3 - CS 146abdellatiftifa3333Оценок пока нет
- Tugas DDO 1 2021Документ4 страницыTugas DDO 1 2021RindangОценок пока нет
- Machine IntelligenceДокумент3 страницыMachine IntelligenceNagarjun AkellaОценок пока нет
- Thesis Proposal On: Passive Copy-Move Image Forgery Detection Using Wavelet TransformДокумент19 страницThesis Proposal On: Passive Copy-Move Image Forgery Detection Using Wavelet TransformGopal DahalОценок пока нет
- All in OneДокумент197 страницAll in OneJiya AlamОценок пока нет