Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Mody M100T 50 60Документ2 страницыMody M100T 50 60NAHASALI11Оценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Pro-Watch Ecosystem: The Power of TheДокумент1 страницаPro-Watch Ecosystem: The Power of TheNik SiagОценок пока нет
- A HandBook On Finacle Work Flow Process 1st EditionДокумент79 страницA HandBook On Finacle Work Flow Process 1st EditionSpos Udupi100% (2)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- GE 8 ETHICS Week2 9Документ54 страницыGE 8 ETHICS Week2 9Jay Ar OmbleroОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Topic 2 Evidencias Clase 7 L Reading - Young PilotsДокумент4 страницыTopic 2 Evidencias Clase 7 L Reading - Young PilotsJam C. PoloОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- NA BR 1177 EN Dematic AutoStore SubsystemДокумент8 страницNA BR 1177 EN Dematic AutoStore SubsystemDaniel Garnando KristianОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Pipeline Construction InspecДокумент48 страницPipeline Construction InspecAliDadKhan100% (2)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Lister Hr3 ManualДокумент119 страницLister Hr3 ManualRichard Gomez Cueva100% (2)
- Interpreting The Venus CycleДокумент2 страницыInterpreting The Venus Cyclemurx2100% (1)
- Ballsim DirectДокумент58 страницBallsim DirectDiego GaliciaОценок пока нет
- Refraction Through A Lens PDFДокумент3 страницыRefraction Through A Lens PDFPrudhvi JoshiОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Uniden Bearcat Scanner BC365CRS Owners ManualДокумент32 страницыUniden Bearcat Scanner BC365CRS Owners ManualBenjamin DoverОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Procedure: Pressure Equipment Safety: PurposeДокумент9 страницProcedure: Pressure Equipment Safety: PurposeChegwe CorneliusОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Samsung 932GW PDFДокумент72 страницыSamsung 932GW PDFSaidfa FaОценок пока нет
- Akruti Marathi MultiFont Engine ReadmeДокумент22 страницыAkruti Marathi MultiFont Engine Readmenmshingote2779% (38)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Kids 2: INSTITUTO CAMBRIDGE de Cultura Inglesa - EXÁMENES 2019Документ2 страницыKids 2: INSTITUTO CAMBRIDGE de Cultura Inglesa - EXÁMENES 2019Evaluna MoidalОценок пока нет
- AIMS Manual - 2021Документ82 страницыAIMS Manual - 2021Randyll TarlyОценок пока нет
- HTTPHeader LiveДокумент199 страницHTTPHeader LiveDenys BautistaОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- 027 03 Dec13 CseДокумент647 страниц027 03 Dec13 CseParth NagarОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Viaje Del SolДокумент3 страницыViaje Del SolJanella UmiehОценок пока нет
- AirBossPSS100andEvoplusseriesscba Donning ProcedureДокумент1 страницаAirBossPSS100andEvoplusseriesscba Donning ProcedureMarco LondonОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Recent Advances in Second Generation Bioethanol Production An Insight To Pretreatment, Saccharification and Fermentation ProcessesДокумент11 страницRecent Advances in Second Generation Bioethanol Production An Insight To Pretreatment, Saccharification and Fermentation ProcessesBryant CoolОценок пока нет
- Intro To RMAN-10g-okДокумент41 страницаIntro To RMAN-10g-okAnbao ChengОценок пока нет
- Student Camps 2022 - Grade 6 Science Curriculum Based Test BookletДокумент58 страницStudent Camps 2022 - Grade 6 Science Curriculum Based Test Bookletthank you GodОценок пока нет
- TSS Training Package Implementation Guidefinal 0Документ18 страницTSS Training Package Implementation Guidefinal 0hanabbecharaОценок пока нет
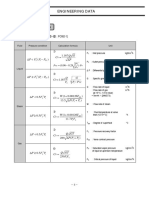
- Engineering Data: 2. CV CalculationДокумент1 страницаEngineering Data: 2. CV Calculationdj22500Оценок пока нет
- Pre-Placement Training Program: Sample Profiling (All About You)Документ2 страницыPre-Placement Training Program: Sample Profiling (All About You)RISHAV RAJ GUPTAОценок пока нет
- Measuring PovertyДокумент47 страницMeasuring PovertyPranabes DuttaОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- 2020 Sec 4 E Math SA2 Anderson Secondary-pages-DeletedДокумент41 страница2020 Sec 4 E Math SA2 Anderson Secondary-pages-Deletedregi naОценок пока нет