Вам также может понравиться
- 3-Analyse Temporelle Des Systemes Lineaires PDFДокумент8 страниц3-Analyse Temporelle Des Systemes Lineaires PDFBouallegue MounirОценок пока нет
- TP N 1 RsaДокумент15 страницTP N 1 RsaAbar youcefОценок пока нет
- 4 Fonction de TransfertДокумент18 страниц4 Fonction de TransfertAna SmaalОценок пока нет
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2От EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Оценок пока нет
- Mpsi c2 Chap3 Fonction de TransfertДокумент8 страницMpsi c2 Chap3 Fonction de TransfertkamalОценок пока нет
- TD4 AsservissementДокумент2 страницыTD4 Asservissementred100% (2)
- Ch3 Régime SinusoïdalДокумент23 страницыCh3 Régime SinusoïdalHamza NajarОценок пока нет
- TD Automatique AutomatismeДокумент8 страницTD Automatique AutomatismeMou Héb RzОценок пока нет
- 6 - Correction Des Systèmes AsservisДокумент32 страницы6 - Correction Des Systèmes AsservisKatia MuslimaОценок пока нет
- TD 06 Corrigé - Comportement Temporel Des SLCI Du 2ème OrdreДокумент10 страницTD 06 Corrigé - Comportement Temporel Des SLCI Du 2ème OrdreMohamed AbaakilОценок пока нет
- Transfosignaux PDFДокумент4 страницыTransfosignaux PDFAnis Souissi100% (2)
- Série Rég GM - GIДокумент5 страницSérie Rég GM - GINisrine DaoukiОценок пока нет
- Systèmes Du Second OrdreДокумент6 страницSystèmes Du Second Ordretrawri007Оценок пока нет
- Td2 AutomatiqueДокумент30 страницTd2 AutomatiqueCharaf LeoОценок пока нет
- Tpe MecatroniqueДокумент3 страницыTpe MecatroniqueTchemaka Massaï OlivierОценок пока нет
- TD N°4 Représentation Des SLCI FT Schémas Blocs SLCI Asservis 1 PDFДокумент4 страницыTD N°4 Représentation Des SLCI FT Schémas Blocs SLCI Asservis 1 PDFseye abdou aziz50% (2)
- TP La ThermistanceДокумент1 страницаTP La ThermistanceKader MilanoОценок пока нет
- TD N°2 Solution Régulateur Tout Ou Rien (TOR) - ConvertiДокумент2 страницыTD N°2 Solution Régulateur Tout Ou Rien (TOR) - ConvertiMãl Îk100% (2)
- Chapitre II Système 1ier OrdreДокумент13 страницChapitre II Système 1ier OrdreHamou WaltОценок пока нет
- Exercices Automatique 2016Документ19 страницExercices Automatique 2016AbdElKrim100% (3)
- TDs - Electronique de PuissanceДокумент12 страницTDs - Electronique de Puissancebilal bil100% (1)
- Redresseur CДокумент24 страницыRedresseur CMoundir Bachir Elezaar100% (1)
- TP N°01 Analyse Temporelle D'un Syst'eme Dynamique Du 1er OrdreДокумент16 страницTP N°01 Analyse Temporelle D'un Syst'eme Dynamique Du 1er OrdreSamy BOUARROUОценок пока нет
- Moteur Et AutomatiqueДокумент8 страницMoteur Et Automatiquepapemagueye wagne100% (1)
- Chapitre 2 EPДокумент13 страницChapitre 2 EPAbdelhamid BouremmaОценок пока нет
- Les DiodesДокумент11 страницLes DiodeskadirikakaОценок пока нет
- MCCДокумент8 страницMCCAyoub JoubixОценок пока нет
- TD 2 (Ex & Sol)Документ17 страницTD 2 (Ex & Sol)eto 03100% (4)
- TD 2 AutomatiqueДокумент12 страницTD 2 AutomatiqueNawres AbbessiОценок пока нет
- FONCTION DE TRANSFERT - CopieДокумент10 страницFONCTION DE TRANSFERT - CopiePhenix PhenixОценок пока нет
- TD11 12 CorrectionДокумент5 страницTD11 12 Correctionsoufiane8fka0% (1)
- TD 8 (Ex & Sol)Документ6 страницTD 8 (Ex & Sol)aymen sayoudОценок пока нет
- Chapitre 1 Structure D'un Système de Commande Numérique PDFДокумент10 страницChapitre 1 Structure D'un Système de Commande Numérique PDFMehdi BaaliОценок пока нет
- 1a Automatique Tds OldДокумент59 страниц1a Automatique Tds OldredaОценок пока нет
- TD 03 - Schémas Blocs Fonctionnels - CorrigéДокумент2 страницыTD 03 - Schémas Blocs Fonctionnels - CorrigéAimé Mak100% (1)
- Cnc-2009 Si Tsi Ge CorrigeДокумент7 страницCnc-2009 Si Tsi Ge Corrigeali18abidОценок пока нет
- Des Problémes ElectroniqueДокумент15 страницDes Problémes ElectroniqueTest TestОценок пока нет
- TD Statique CinématiqueДокумент5 страницTD Statique CinématiqueAhmed fattoumОценок пока нет
- Simulation Sur Matlab D'Un Systeme D'Asservissement de Vitesse D'Une Machine A Courant ContinuДокумент116 страницSimulation Sur Matlab D'Un Systeme D'Asservissement de Vitesse D'Une Machine A Courant Continungolo shunguОценок пока нет
- TD2 CapteursДокумент1 страницаTD2 CapteursRabah Amidi100% (2)
- Tp1 PDFДокумент4 страницыTp1 PDFMohamed amirОценок пока нет
- TD4 - Reponse Frequentielle - Solution2021iДокумент8 страницTD4 - Reponse Frequentielle - Solution2021iAmir DridiОценок пока нет
- Comte Rendu TP Analyse NymériqueДокумент15 страницComte Rendu TP Analyse NymériqueImane El OuadrhiriОценок пока нет
- QCM Electricité - Correction 2018Документ2 страницыQCM Electricité - Correction 2018HibaОценок пока нет
- ExercicesДокумент2 страницыExercicesIñ Saf100% (2)
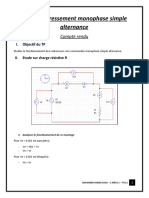
- Chapitre1 Monophasé PDFДокумент8 страницChapitre1 Monophasé PDFTimmo Kekelwa100% (1)
- Chapitre 2 - Le Régime SinusoïdalДокумент4 страницыChapitre 2 - Le Régime SinusoïdalBeatrice Florin100% (1)
- Verins Pneumatiques E12c-2Документ2 страницыVerins Pneumatiques E12c-2dsiscnОценок пока нет
- Circuit RLC Serie en Regime Sinusoidal Force Cours 1 1 PDFДокумент7 страницCircuit RLC Serie en Regime Sinusoidal Force Cours 1 1 PDFFaridaОценок пока нет
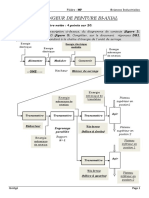
- Melangeur de Peinture Bi-AxialДокумент18 страницMelangeur de Peinture Bi-AxialBalalaŇaŖîfОценок пока нет
- Machine Courant ContinuДокумент3 страницыMachine Courant ContinuAnas HEDDOUNОценок пока нет
- Chapitre V Courant AlternatifДокумент28 страницChapitre V Courant AlternatifDiakhate El hadji omar100% (1)
- DocumentДокумент19 страницDocumentamaniОценок пока нет
- Correction Exos Qté MVTДокумент7 страницCorrection Exos Qté MVTamaniОценок пока нет
- TP - Conv (Finale)Документ29 страницTP - Conv (Finale)amaniОценок пока нет
- Trait Num Du Sig (CMPT Rendue tp2) PDFДокумент6 страницTrait Num Du Sig (CMPT Rendue tp2) PDFamaniОценок пока нет
- Trait Num Du Sig (CMPT Rendue tp2) PDFДокумент6 страницTrait Num Du Sig (CMPT Rendue tp2) PDFamaniОценок пока нет
- Conversion TP1 Compte RenduДокумент7 страницConversion TP1 Compte RenduamaniОценок пока нет
- Conversion TP3 Compte RenduДокумент12 страницConversion TP3 Compte RenduamaniОценок пока нет
- SodaPDF-converted-Initiation - MATLAB - Comte Rendu - tp1Документ5 страницSodaPDF-converted-Initiation - MATLAB - Comte Rendu - tp1amaniОценок пока нет
- Langage C Embarque PDFДокумент110 страницLangage C Embarque PDFMajid MlaouhiaОценок пока нет
- Correction ExamenTS20122013 enДокумент8 страницCorrection ExamenTS20122013 enamaniОценок пока нет
- Initiation - MATLAB - Comte Rendu - tp1Документ5 страницInitiation - MATLAB - Comte Rendu - tp1amaniОценок пока нет
- Chapitre I STM32 Programmation GPIO ParДокумент59 страницChapitre I STM32 Programmation GPIO ParamaniОценок пока нет
- Devoir Corrigé de Synthèse N°1 - Sciences Physiques - Bac Math (2015-2016) MR Benjeddou Rachid PDFДокумент10 страницDevoir Corrigé de Synthèse N°1 - Sciences Physiques - Bac Math (2015-2016) MR Benjeddou Rachid PDFMustapha ElhafiОценок пока нет
- SodaPDF-converted-Trait Num Du Sig (CMPT Rendue tp2)Документ6 страницSodaPDF-converted-Trait Num Du Sig (CMPT Rendue tp2)amaniОценок пока нет
- Dynamic ModelДокумент54 страницыDynamic ModelamaniОценок пока нет
- TD Transformée en ZДокумент20 страницTD Transformée en ZamaniОценок пока нет
- Proba Continue3Документ3 страницыProba Continue3amaniОценок пока нет
- Remarques Et Astuces de Programmation en AssembleurДокумент31 страницаRemarques Et Astuces de Programmation en AssembleuramaniОценок пока нет
- Walid Hakimi: Travaux Pratique N°1 de M Accès À La Mémoire RAM Du PIC 16F877Документ6 страницWalid Hakimi: Travaux Pratique N°1 de M Accès À La Mémoire RAM Du PIC 16F877amaniОценок пока нет
- Chap 2Документ10 страницChap 2amaniОценок пока нет
- 6 CristallographieДокумент29 страниц6 CristallographieamaniОценок пока нет
- Cours - Technologie L'Analyse Descendante (SADT) - 2ème Sciences (2014-2015) MR Rafik Ben AmorДокумент8 страницCours - Technologie L'Analyse Descendante (SADT) - 2ème Sciences (2014-2015) MR Rafik Ben AmorYoussef YouriОценок пока нет
- Devoir de Synthèse N°1 - Technologie - Poste Automatique de Perçage - 2ème Sciences (2016-2017) MR HammiДокумент6 страницDevoir de Synthèse N°1 - Technologie - Poste Automatique de Perçage - 2ème Sciences (2016-2017) MR HammiamaniОценок пока нет
- Exemples Transformée en ZДокумент9 страницExemples Transformée en ZamaniОценок пока нет
- AilettersДокумент51 страницаAilettersamaniОценок пока нет
- Remarques Et Astuces de Programmation en AssembleurДокумент31 страницаRemarques Et Astuces de Programmation en AssembleuramaniОценок пока нет
- Proba Continue3Документ3 страницыProba Continue3amaniОценок пока нет
- Proba 1Документ4 страницыProba 1amaniОценок пока нет
- Phrases Et Expressions Utiles Pour Un Exposé Oral RéussiДокумент1 страницаPhrases Et Expressions Utiles Pour Un Exposé Oral RéussiPFER100% (3)
- Phrases Et Expressions Utiles Pour Un Exposé Oral RéussiДокумент1 страницаPhrases Et Expressions Utiles Pour Un Exposé Oral RéussiPFER100% (3)
- Polytechnique MP 2011 Physique Et SI Rapport JuryДокумент5 страницPolytechnique MP 2011 Physique Et SI Rapport JurydiderОценок пока нет
- AmpliДокумент7 страницAmpliBounegab YoucefОценок пока нет
- Circuit RLC: T.P InstrumentationДокумент9 страницCircuit RLC: T.P Instrumentationfakhredb31Оценок пока нет
- Examen3 Traitement Du SignalДокумент4 страницыExamen3 Traitement Du SignalYassine HarirОценок пока нет
- Automatique COURSДокумент5 страницAutomatique COURSToto Le boОценок пока нет
- Correction SystemesДокумент29 страницCorrection SystemesredaОценок пока нет
- Correction Exercice de Cours - Filtre IIRДокумент10 страницCorrection Exercice de Cours - Filtre IIRTitouan de Bailleul67% (12)
- Chapitre 4Документ41 страницаChapitre 4wiem kahwechОценок пока нет
- Cadv - Pa - 2019 2Документ31 страницаCadv - Pa - 2019 2Ilias ZeamariОценок пока нет
- Filtres PassifsДокумент7 страницFiltres PassifsJaamesОценок пока нет
- Systèmes AsservisДокумент2 страницыSystèmes AsservisAlaEddineBelhajFrajОценок пока нет
- Révision Elec2 L1 RT S2Документ12 страницRévision Elec2 L1 RT S2Zain GaradiОценок пока нет
- Master Msila 2019Документ105 страницMaster Msila 2019anis koulОценок пока нет
- Tp4 (La Fonction de Transfert)Документ6 страницTp4 (La Fonction de Transfert)Lilia MahdjoubОценок пока нет
- Filtres Passe BasДокумент16 страницFiltres Passe BasABDELNASSERОценок пока нет
- TD 03 AlcДокумент2 страницыTD 03 AlcRahimou BnmdhОценок пока нет
- Quadri Pole 2Документ16 страницQuadri Pole 2ato ndongo fabriceОценок пока нет
- 2016 - 2017 - SEER-1 & GECSI-1 - RégulateursДокумент34 страницы2016 - 2017 - SEER-1 & GECSI-1 - RégulateursMounaim MatiniОценок пока нет
- Etude Dun Regulateur Pid A Action Integrale Floue de Systemes Dynamiques 2Документ7 страницEtude Dun Regulateur Pid A Action Integrale Floue de Systemes Dynamiques 2youcef difОценок пока нет
- Fascicule - IE4 AutomatiqueДокумент22 страницыFascicule - IE4 AutomatiqueSameh GriraОценок пока нет
- j1 124 2 Asservissement CorrectionДокумент10 страницj1 124 2 Asservissement CorrectionmarnОценок пока нет
- GELE5313 Notes5Документ8 страницGELE5313 Notes5Hadia DjeltiОценок пока нет
- TP1 AutomatiqueДокумент14 страницTP1 AutomatiqueRamzi AyadiОценок пока нет
- TD2 2021Документ2 страницыTD2 2021Benchabane Abderrahim100% (1)
- TP1 LP RegulationДокумент3 страницыTP1 LP Regulationikram bouhadlaОценок пока нет
- tp5 Les Filtres ActifsДокумент4 страницыtp5 Les Filtres ActifsTS AUTOMATISATION100% (2)
- Chapitre Correcteurs Smp6 Opt ElectДокумент21 страницаChapitre Correcteurs Smp6 Opt ElectANAS ETTANANIAОценок пока нет
- Auto1 Exercices1 SolutionsFinalesДокумент1 страницаAuto1 Exercices1 SolutionsFinalesYASYN LAMRIDОценок пока нет
- Chapitre 3 Analyse Temporelle Frequentielle SLC PDFДокумент24 страницыChapitre 3 Analyse Temporelle Frequentielle SLC PDFboumehedОценок пока нет
- Régulation Industrielle-Chapitre 3-2017-1-BF (Mode de Compatibilité)Документ25 страницRégulation Industrielle-Chapitre 3-2017-1-BF (Mode de Compatibilité)amine milano100% (2)