Вам также может понравиться
- Designing An Automated Agent To Encourage Human RelianceДокумент5 страницDesigning An Automated Agent To Encourage Human RelianceMehdi PoornikooОценок пока нет
- Theoretical Issues in Ergonomics Science: Click For UpdatesДокумент27 страницTheoretical Issues in Ergonomics Science: Click For UpdatesMehdi PoornikooОценок пока нет
- Modeling The Interplay of Trust and Attention in HRI: An Autonomous Vehicle StudyДокумент3 страницыModeling The Interplay of Trust and Attention in HRI: An Autonomous Vehicle StudyMehdi PoornikooОценок пока нет
- The Privileged Sensing Framework: A Principled Approach To Improved Human-Autonomy IntegrationДокумент39 страницThe Privileged Sensing Framework: A Principled Approach To Improved Human-Autonomy IntegrationMehdi PoornikooОценок пока нет
- Salmon Et Al. - 2009Документ11 страницSalmon Et Al. - 2009Mehdi PoornikooОценок пока нет
- (Materials Management - Logistics Series 12) John W. Toomey (Auth.) - Inventory Management - Principles, Concepts and Techniques-Springer US (2000)Документ226 страниц(Materials Management - Logistics Series 12) John W. Toomey (Auth.) - Inventory Management - Principles, Concepts and Techniques-Springer US (2000)Mehdi Poornikoo100% (1)
- Recommendation of LettersДокумент21 страницаRecommendation of LettersMehdi PoornikooОценок пока нет
- Practical Methods of OptimizationДокумент451 страницаPractical Methods of OptimizationMehdi Poornikoo88% (8)
- Nonlinear ProgrammingДокумент372 страницыNonlinear ProgrammingNihad GrabovicaОценок пока нет
- Gamification Bbva Innovation CenterДокумент33 страницыGamification Bbva Innovation CenterColabora EmprendeОценок пока нет
- Introduction To Guide To MarketingДокумент4 страницыIntroduction To Guide To MarketingMehdi PoornikooОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Cat It62hДокумент4 страницыCat It62hMarceloОценок пока нет
- MTBE - Module - 3Документ83 страницыMTBE - Module - 3ABHIJITH V SОценок пока нет
- Baterías YuasaДокумент122 страницыBaterías YuasaLuisОценок пока нет
- AngularJS Cheat SheetДокумент3 страницыAngularJS Cheat SheetZulqarnain Hashmi100% (1)
- LOVДокумент43 страницыLOVMei FadillahОценок пока нет
- Job Description: Extensive ReadingДокумент12 страницJob Description: Extensive ReadingNatalia VivonaОценок пока нет
- MushroomДокумент8 страницMushroomAkshay AhlawatОценок пока нет
- Data Sheet: Permanent Magnet GeneratorДокумент2 страницыData Sheet: Permanent Magnet Generatordiegoadjgt100% (1)
- ZX400LCH 5GДокумент16 страницZX400LCH 5Gusmanitp2Оценок пока нет
- Octopus 900 Instructions For UseДокумент18 страницOctopus 900 Instructions For UseAli FadhilОценок пока нет
- Partes Oki - MPS5501B - RSPL - Rev - HДокумент12 страницPartes Oki - MPS5501B - RSPL - Rev - HJaiber Eduardo Gutierrez OrtizОценок пока нет
- Kajian Sistematik: Strategi Pembelajaran Klinik Di Setting Rawat JalanДокумент5 страницKajian Sistematik: Strategi Pembelajaran Klinik Di Setting Rawat JalanrhiesnaОценок пока нет
- HANA Heroes 1 - EWM Lessons Learned (V2)Документ40 страницHANA Heroes 1 - EWM Lessons Learned (V2)Larissa MaiaОценок пока нет
- PCIB Vs ESCOLIN (G.R. No. L-27860 & L-27896)Документ61 страницаPCIB Vs ESCOLIN (G.R. No. L-27860 & L-27896)strgrlОценок пока нет
- How To Configure VFD - General - Guides & How-Tos - CoreELEC ForumsДокумент13 страницHow To Configure VFD - General - Guides & How-Tos - CoreELEC ForumsJemerald MagtanongОценок пока нет
- 20151201-Baltic Sea Regional SecurityДокумент38 страниц20151201-Baltic Sea Regional SecurityKebede MichaelОценок пока нет
- Bar Q Salaries Part 2Документ5 страницBar Q Salaries Part 2Brigette DomingoОценок пока нет
- M98 PVT 051 7546.bakДокумент96 страницM98 PVT 051 7546.bakmarkbillupsОценок пока нет
- Teacher Planner 2023 PDFДокумент52 страницыTeacher Planner 2023 PDFitaОценок пока нет
- Dominar 400 Spare Parts CatalogueДокумент82 страницыDominar 400 Spare Parts CatalogueAkshayaОценок пока нет
- Partnership Law (Chapter 1 and 2) - ReviewerДокумент9 страницPartnership Law (Chapter 1 and 2) - ReviewerJeanne Marie0% (1)
- Shareholder Agreement 06Документ19 страницShareholder Agreement 06Josmar TelloОценок пока нет
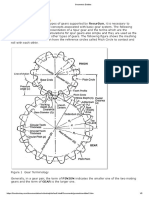
- Geometric Entities: Basic Gear TerminologyДокумент5 страницGeometric Entities: Basic Gear TerminologyMatija RepincОценок пока нет
- RVT Liquid DistributorДокумент5 страницRVT Liquid DistributorimeagorОценок пока нет
- FM - 30 MCQДокумент8 страницFM - 30 MCQsiva sankarОценок пока нет
- Output Vat Zero-Rated Sales ch8Документ3 страницыOutput Vat Zero-Rated Sales ch8Marionne GОценок пока нет
- Important Questions Mba-Ii Sem Organisational BehaviourДокумент24 страницыImportant Questions Mba-Ii Sem Organisational Behaviourvikas__ccОценок пока нет
- Chapter 3 - A Top-Level View of Computer Function and InterconnectionДокумент8 страницChapter 3 - A Top-Level View of Computer Function and InterconnectionChu Quang HuyОценок пока нет
- Lae ReservingДокумент5 страницLae ReservingEsra Gunes YildizОценок пока нет
- Sowk-625 Iq Tool 4Документ22 страницыSowk-625 Iq Tool 4api-405320544Оценок пока нет