Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Newspaper Readership in Nigeria12Документ13 страницNewspaper Readership in Nigeria12Ayodeji Omilabu100% (1)
- BaddiДокумент22 страницыBaddiraj.kajaniya60% (5)
- Historical Development in Science and TechnologyДокумент31 страницаHistorical Development in Science and TechnologyMecaella Bondoc100% (7)
- Chapter 5 Leadership StylesДокумент3 страницыChapter 5 Leadership Stylesapi-3092626380% (1)
- Wings of FireДокумент5 страницWings of FireJitendra AsawaОценок пока нет
- Guidelines For Internship Program of BBA Students: Department of Business AdministrationДокумент7 страницGuidelines For Internship Program of BBA Students: Department of Business AdministrationTanzia RahmanОценок пока нет
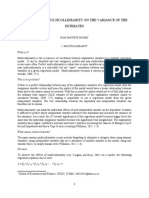
- Soldiers Heart Thesis StatementДокумент6 страницSoldiers Heart Thesis Statementkimberlyharrisbaltimore100% (2)
- Conceptual FrameworkДокумент16 страницConceptual FrameworkCatherine Irada Igharas-CarmenОценок пока нет
- On Territorology Towards A General Science of TerrДокумент23 страницыOn Territorology Towards A General Science of Terrca taОценок пока нет
- Multicollinearity Correctionsv3Документ2 страницыMulticollinearity Correctionsv3John NkumeОценок пока нет
- Glow Health: Case DescriptionДокумент4 страницыGlow Health: Case DescriptionacharyamalvikaОценок пока нет
- Indusdrial Visit in SSP PVT LTD FaridabadДокумент16 страницIndusdrial Visit in SSP PVT LTD FaridabadkedarnathvishwakarmaОценок пока нет
- Write Critical Response EssayДокумент4 страницыWrite Critical Response EssayNuraini Azizah WirananggapatiОценок пока нет
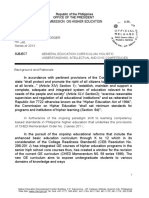
- Commission On Higher Education ,. X.M, at " RДокумент30 страницCommission On Higher Education ,. X.M, at " RBasti ApareceОценок пока нет
- 2.4-Description of Coursework Sep 2023Документ6 страниц2.4-Description of Coursework Sep 2023HUANG WENCHENОценок пока нет
- Frequency DistributionДокумент19 страницFrequency DistributionRhaine EstebanОценок пока нет
- Community Language LearningДокумент19 страницCommunity Language LearningfullhausОценок пока нет
- Eng 10: Purposive Communication Research Paper Format: I. Cover PageДокумент2 страницыEng 10: Purposive Communication Research Paper Format: I. Cover PageBibly Immelinn BaguioОценок пока нет
- Butterfield Bermuda Championship Economic Impact Report 2Документ17 страницButterfield Bermuda Championship Economic Impact Report 2Anonymous UpWci5Оценок пока нет
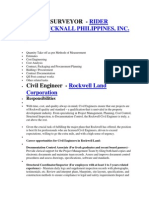
- Quantity Surveyor - : Rider Levett Bucknall Philippines, IncДокумент3 страницыQuantity Surveyor - : Rider Levett Bucknall Philippines, IncCarlito PantalunanОценок пока нет
- D20-D21-D22 - Hull Structure Monitoring System and VDR - 07-12-09 V6Документ52 страницыD20-D21-D22 - Hull Structure Monitoring System and VDR - 07-12-09 V6CalandrasReyCalandrasreyОценок пока нет
- MMW Midterm Problem Set 1st Sem 21-22Документ6 страницMMW Midterm Problem Set 1st Sem 21-22Alyssa YdioОценок пока нет
- NG, JOHN LOUIS A. - ACTIVITY - 1 - (Section 2548) - PA 205 Fundamentals of StatisticsДокумент2 страницыNG, JOHN LOUIS A. - ACTIVITY - 1 - (Section 2548) - PA 205 Fundamentals of StatisticsLouis NgОценок пока нет
- Rahul Final PPT NDPLДокумент26 страницRahul Final PPT NDPLRahul AgariayaОценок пока нет
- Project-Based Learning From Theory To EFLClassroomPractice 2Документ14 страницProject-Based Learning From Theory To EFLClassroomPractice 2Ahmed GhorabaОценок пока нет
- Scale For Measuring Transformational Leadership inДокумент13 страницScale For Measuring Transformational Leadership ingedleОценок пока нет
- SamplingДокумент26 страницSamplingdarlene jane maynesОценок пока нет
- Hur Kazmi (ACCA) CVДокумент4 страницыHur Kazmi (ACCA) CVHur KazmiОценок пока нет
- BRM Solved McqsДокумент8 страницBRM Solved Mcqssamee khan80% (10)
- Week 2 Process For Identifying RisksДокумент6 страницWeek 2 Process For Identifying RisksasifsubhanОценок пока нет