Вам также может понравиться
- Avr Conversion Instructions: FITTING KIT 45-0054 FOR USE WITH SX440 AVR Part No. E000-24030Документ2 страницыAvr Conversion Instructions: FITTING KIT 45-0054 FOR USE WITH SX440 AVR Part No. E000-24030Jose Pirulli100% (1)
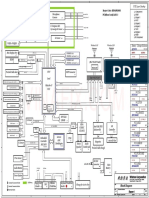
- ThinkPad Carbon X1 LRV-1 14282-2M 14282-3Документ100 страницThinkPad Carbon X1 LRV-1 14282-2M 14282-3zomikula100% (3)
- Rock Drill & SluДокумент36 страницRock Drill & SluElizabeth Octagon100% (2)
- Chapter 2 / Section 2: TroubleshootingДокумент66 страницChapter 2 / Section 2: TroubleshootingCesar Guzman67% (3)
- CSE 202.05 Repair of Concrete StructuresДокумент118 страницCSE 202.05 Repair of Concrete StructuresJellyn BaseОценок пока нет
- Notes 3Документ8 страницNotes 3Sriram BalasubramanianОценок пока нет
- Support Vector Machine - Python Implementation Using CVXOPT - Data BlogДокумент12 страницSupport Vector Machine - Python Implementation Using CVXOPT - Data Blogwandalex100% (1)
- Python Codes For Num Methds WTH Graph SolutionДокумент141 страницаPython Codes For Num Methds WTH Graph Solutionvijay kumar honnaliОценок пока нет
- DT Notes 2020Документ14 страницDT Notes 2020Ling Min HaoОценок пока нет
- Lec 1 - 2 - Linear Programming PDFДокумент1 страницаLec 1 - 2 - Linear Programming PDFAhmed SamyОценок пока нет
- Linear Classifiers: An IntroductionДокумент9 страницLinear Classifiers: An IntroductionAli ZafarОценок пока нет
- 7th Lecture Note 230515 135845Документ21 страница7th Lecture Note 230515 135845Girie YumОценок пока нет
- Polynomial Functions: FX A X A X A X A X AДокумент11 страницPolynomial Functions: FX A X A X A X A X Ac.hubyОценок пока нет
- Linear Programming - Brilliant Math & Science WikiДокумент19 страницLinear Programming - Brilliant Math & Science WikiILLA PAVAN KUMAR (PA2013003013042)Оценок пока нет
- Q-Learning and Deep Q Networks (DQN)Документ52 страницыQ-Learning and Deep Q Networks (DQN)bscjjwОценок пока нет
- Log-Linear Models, MEMMs, and CRFs ExplainedДокумент11 страницLog-Linear Models, MEMMs, and CRFs ExplainedAnshuman MitraОценок пока нет
- MATH 426 Assignment 3 Factorial and Linear IndependenceДокумент2 страницыMATH 426 Assignment 3 Factorial and Linear IndependenceUmar Raza0% (1)
- 6th Lecture Note 108335647 230518 203102Документ35 страниц6th Lecture Note 108335647 230518 203102Girie YumОценок пока нет
- Department of Electrical Engineering School of Science and Engineering EE514/CS535 Machine Learning Homework 1Документ11 страницDepartment of Electrical Engineering School of Science and Engineering EE514/CS535 Machine Learning Homework 1Muhammad HusnainОценок пока нет
- Ridge Regression: Ryota Tomioka Department of Mathema6cal Informa6cs The University of TokyoДокумент53 страницыRidge Regression: Ryota Tomioka Department of Mathema6cal Informa6cs The University of TokyoRyota TomiokaОценок пока нет
- Linear Regression with Gradient DescentДокумент43 страницыLinear Regression with Gradient DescentTev WallaceОценок пока нет
- Multiple limit cycles from a predator-prey modelДокумент12 страницMultiple limit cycles from a predator-prey modelEmilioTSОценок пока нет
- Logistic Regression: Gunjan Bharadwaj Assistant Professor Dept of CEAДокумент42 страницыLogistic Regression: Gunjan Bharadwaj Assistant Professor Dept of CEARahul Singh100% (1)
- Elements of H2 A Level MathДокумент13 страницElements of H2 A Level MathnicОценок пока нет
- Lecture 6 - State-Space Systems in Matlab: (T) A (T) + B (T) X X U C + D y X UДокумент33 страницыLecture 6 - State-Space Systems in Matlab: (T) A (T) + B (T) X X U C + D y X UPythonraptorОценок пока нет
- 1521instructions PDFДокумент12 страниц1521instructions PDFAdauto AlvesОценок пока нет
- Confidence LevelДокумент31 страницаConfidence LevelMuhammad Nauman UsmaniОценок пока нет
- Chart AssignmentsДокумент2 страницыChart AssignmentsPace InfotechОценок пока нет
- ECE 7670 Lecture 5 - Cyclic CodesДокумент11 страницECE 7670 Lecture 5 - Cyclic CodesAkira KurodaОценок пока нет
- cs188 Fa23 Note21Документ8 страницcs188 Fa23 Note21Ali RahimiОценок пока нет
- OQM Lecture Note - Part 1 Introduction To Mathematical OptimisationДокумент10 страницOQM Lecture Note - Part 1 Introduction To Mathematical OptimisationdanОценок пока нет
- Math5335 2018Документ5 страницMath5335 2018Peper12345Оценок пока нет
- Evaluating Polynomials: Getting Along Without Variables: 1. The Most Straightforward Way To Do ItДокумент5 страницEvaluating Polynomials: Getting Along Without Variables: 1. The Most Straightforward Way To Do ItlaoraculoОценок пока нет
- Chapter One Polynomials: 1-1 Introduction Definition 1.1: A Monomial in Variable X Is An Expression of The Form C XДокумент28 страницChapter One Polynomials: 1-1 Introduction Definition 1.1: A Monomial in Variable X Is An Expression of The Form C Xعبداللە عمر ابراهیمОценок пока нет
- Lab 5Документ5 страницLab 5Gon GonОценок пока нет
- Quadratic Programming with MATLAB and quadprogДокумент4 страницыQuadratic Programming with MATLAB and quadprogEmpire AlliesОценок пока нет
- Hw5 SolutionДокумент4 страницыHw5 SolutionbrsbyrmОценок пока нет
- Homework3 SolДокумент5 страницHomework3 SolAnkit ShrivastavaОценок пока нет
- CS229 Problem Set #3: Learning Theory and Unsupervised LearningДокумент4 страницыCS229 Problem Set #3: Learning Theory and Unsupervised Learningsuhar adiОценок пока нет
- M1 +Review+of+Mathematical+FoundationsДокумент4 страницыM1 +Review+of+Mathematical+FoundationsKpop HarteuОценок пока нет
- Introduction to Hilbert SpacesДокумент18 страницIntroduction to Hilbert SpacesPrasann SethiОценок пока нет
- Module 05 PDFДокумент20 страницModule 05 PDFHari KandelОценок пока нет
- Feedback - Logistic Regression HelpДокумент5 страницFeedback - Logistic Regression HelpChinmay Bhushan100% (1)
- Computational Lab in Physics: Solving Differential EquationsДокумент20 страницComputational Lab in Physics: Solving Differential Equationsbenefit187Оценок пока нет
- HW 4Документ7 страницHW 4Angel AvilaОценок пока нет
- Typesetting Math in TextsДокумент4 страницыTypesetting Math in TextsIceFrogОценок пока нет
- cs229.... Machine Language. Andrew NGДокумент17 страницcs229.... Machine Language. Andrew NGkrishnaОценок пока нет
- Eigen 2Документ10 страницEigen 2Tamil MoviesОценок пока нет
- Plotting Data in 2DДокумент54 страницыPlotting Data in 2DKevwe Macaulay -GbogidiОценок пока нет
- 2P1 Linear Programming Graphical Method SC Intro Graphics Blackwater Cases SCxlsДокумент46 страниц2P1 Linear Programming Graphical Method SC Intro Graphics Blackwater Cases SCxlsRenz ArgarinОценок пока нет
- HW1 SolДокумент7 страницHW1 SolprakshiОценок пока нет
- MATH COURSE III NOTES ON FUNCTIONS, POLYNOMIALS AND TRIGONOMETRYДокумент18 страницMATH COURSE III NOTES ON FUNCTIONS, POLYNOMIALS AND TRIGONOMETRYRobert P.Оценок пока нет
- Computational Methods in Electrical EngineeringДокумент9 страницComputational Methods in Electrical EngineeringROMANCE FantasОценок пока нет
- EE 331 - Signals and Systems: - A Must For All EE Engineers/researchersДокумент29 страницEE 331 - Signals and Systems: - A Must For All EE Engineers/researchersGokhan YassibasОценок пока нет
- Critical Path MaxminДокумент7 страницCritical Path MaxminabhayОценок пока нет
- University of Zakho Faculty of Education Department of Mathematics Second Stage Semester 4Документ28 страницUniversity of Zakho Faculty of Education Department of Mathematics Second Stage Semester 4Mohamed bamarniОценок пока нет
- Computing The Cake Eating ProblemДокумент13 страницComputing The Cake Eating Problem.cadeau01Оценок пока нет
- chat_openai_com_share_42b24a73_839b_4128_ade9_7d8eed9e9533Документ21 страницаchat_openai_com_share_42b24a73_839b_4128_ade9_7d8eed9e9533NadhiyaОценок пока нет
- Lecture 7 Polynomials DR Nahid SanzidaДокумент22 страницыLecture 7 Polynomials DR Nahid SanzidaPulak KunduОценок пока нет
- W8 - Logistic RegressionДокумент18 страницW8 - Logistic Regression5599RAJNISH SINGHОценок пока нет
- Ps 4Документ4 страницыPs 4Androw ShonodaОценок пока нет
- ML Lab ManualДокумент37 страницML Lab Manualapekshapandekar01100% (1)
- Ps 1Документ5 страницPs 1Emre UysalОценок пока нет
- Eco501 Assignment1 Solutions Summer2020Документ3 страницыEco501 Assignment1 Solutions Summer2020maruf91100% (1)
- Putnam polynomialsДокумент13 страницPutnam polynomialstranhason1705Оценок пока нет
- Integer solutions and algebraic number theoryДокумент30 страницInteger solutions and algebraic number theoryDat TranОценок пока нет
- The art of Inequality — Problem solving techniquesДокумент4 страницыThe art of Inequality — Problem solving techniquesDat TranОценок пока нет
- Bryant R.L. An Introduction To Lie Groups and Symplectic Geometry SДокумент170 страницBryant R.L. An Introduction To Lie Groups and Symplectic Geometry Sgallantboy90100% (1)
- ProblemsДокумент5 страницProblemsDat TranОценок пока нет
- The Garamondx Package: 1 OverviewДокумент9 страницThe Garamondx Package: 1 OverviewDat TranОценок пока нет
- Lie Groups BookДокумент128 страницLie Groups BookDat TranОценок пока нет
- Saudi Booklet 2019 FinalДокумент63 страницыSaudi Booklet 2019 FinalTran Le Vu Long100% (1)
- An Algorithm for Portfolio Improvement: Sharpe's Iterative MethodДокумент26 страницAn Algorithm for Portfolio Improvement: Sharpe's Iterative MethodDat TranОценок пока нет
- (Booklet) Saudi Arabia Mathematical Competitions 2016Документ112 страниц(Booklet) Saudi Arabia Mathematical Competitions 2016Dat TranОценок пока нет
- 2012 ELMO Shortlist PDFДокумент5 страниц2012 ELMO Shortlist PDFNadiaОценок пока нет
- Fields and Galois Theory: J.S. MilneДокумент138 страницFields and Galois Theory: J.S. MilneUzoma Nnaemeka TeflondonОценок пока нет
- Certificate Of Donation: Anonymous (佚名)Документ1 страницаCertificate Of Donation: Anonymous (佚名)Dat TranОценок пока нет
- (Booklet) Saudi Arabia Mathematical Competitions 2016Документ112 страниц(Booklet) Saudi Arabia Mathematical Competitions 2016Dat TranОценок пока нет
- An Elegant L TEX Template For BooksДокумент18 страницAn Elegant L TEX Template For BooksDat TranОценок пока нет
- The Socle of A Leavitt Path AlgebraДокумент14 страницThe Socle of A Leavitt Path AlgebraDat TranОценок пока нет
- Fields and Galois Theory: J.S. MilneДокумент138 страницFields and Galois Theory: J.S. MilneUzoma Nnaemeka TeflondonОценок пока нет
- Cayley-Bacharach Theorem for Points in Projective SpaceДокумент13 страницCayley-Bacharach Theorem for Points in Projective SpaceDat TranОценок пока нет
- Master Thesis A Survey On Euclidean Number Fields PDFДокумент121 страницаMaster Thesis A Survey On Euclidean Number Fields PDFDat TranОценок пока нет
- Theory of Intersection of Two Plane Curves: Chuan-Chih HsiungДокумент7 страницTheory of Intersection of Two Plane Curves: Chuan-Chih HsiungDat TranОценок пока нет
- (Lecture Notes in Mathematics 2191) Gene Abrams, Pere Ara, Mercedes Siles Molina (Auth.) - Leavitt Path Algebras-Springer-Verlag London (2017)Документ296 страниц(Lecture Notes in Mathematics 2191) Gene Abrams, Pere Ara, Mercedes Siles Molina (Auth.) - Leavitt Path Algebras-Springer-Verlag London (2017)Đạt Trần TấnОценок пока нет
- The Euclidean Algorithm in Quintic and Septiccyclic Fields PDFДокумент15 страницThe Euclidean Algorithm in Quintic and Septiccyclic Fields PDFDat TranОценок пока нет
- Incentives of Financial Analysts: Trading Turnover and CompensationДокумент52 страницыIncentives of Financial Analysts: Trading Turnover and CompensationDat TranОценок пока нет
- The Socle of A Leavitt Path AlgebraДокумент14 страницThe Socle of A Leavitt Path AlgebraDat TranОценок пока нет
- Estimating Optimal Hedge Ratio and Hedging Effectiveness in The NSE Index FuturesДокумент25 страницEstimating Optimal Hedge Ratio and Hedging Effectiveness in The NSE Index FuturesDat TranОценок пока нет
- Maximizing The Sharpe RatioДокумент3 страницыMaximizing The Sharpe RatioDat TranОценок пока нет
- Price Jump Prediction in A Limit Order Book: Ban Zheng, Eric Moulines, Frédéric AbergelДокумент15 страницPrice Jump Prediction in A Limit Order Book: Ban Zheng, Eric Moulines, Frédéric AbergelDat TranОценок пока нет
- The Euclidean Algorithm in Quintic and Septiccyclic Fields PDFДокумент15 страницThe Euclidean Algorithm in Quintic and Septiccyclic Fields PDFDat TranОценок пока нет
- Water: Application of Long Short-Term Memory (LSTM) Neural Network For Flood ForecastingДокумент19 страницWater: Application of Long Short-Term Memory (LSTM) Neural Network For Flood ForecastingDat TranОценок пока нет
- ABM Module C - Unit 25 HRM & ITДокумент6 страницABM Module C - Unit 25 HRM & ITprjiviОценок пока нет
- On 8-Bus Test System For Solving Challenges in Relay CoordinationДокумент5 страницOn 8-Bus Test System For Solving Challenges in Relay CoordinationDaniel Felipe Macias GonzalezОценок пока нет
- Darksoft'S Neogeo Multi Mvs / AesДокумент9 страницDarksoft'S Neogeo Multi Mvs / AesCarlos Martínez GómezОценок пока нет
- Elkefi Et Al 2022 Impact of Health Informatics On Patients Perception of Health Care Services Trends Over Time ofДокумент6 страницElkefi Et Al 2022 Impact of Health Informatics On Patients Perception of Health Care Services Trends Over Time ofeva kacanjaОценок пока нет
- Electronic Cash Register Programming-ManualДокумент27 страницElectronic Cash Register Programming-ManualRendy Adam FarhanОценок пока нет
- Monitoring CCP3-4 GEA PROCOMAC Week 12 Maret 2023Документ11 страницMonitoring CCP3-4 GEA PROCOMAC Week 12 Maret 2023wulanОценок пока нет
- Module 2 - Series DC MotorДокумент8 страницModule 2 - Series DC MotorMARY JOY MAGAWAYОценок пока нет
- Commercial Cold Test ProColdДокумент8 страницCommercial Cold Test ProColdpolОценок пока нет
- Mpc1 Multi Purpose Can Controller - Reference Manual: Baldur Gíslason December 17, 2018Документ6 страницMpc1 Multi Purpose Can Controller - Reference Manual: Baldur Gíslason December 17, 2018Andrzej GomulaОценок пока нет
- Case Study PotipotДокумент11 страницCase Study PotipotCyril CauilanОценок пока нет
- NASA: 70842main FS-1998-09-34-LaRCДокумент2 страницыNASA: 70842main FS-1998-09-34-LaRCNASAdocumentsОценок пока нет
- Conditional Statements 2Документ10 страницConditional Statements 2Abigel judith PeterОценок пока нет
- Site Date Running Code Equipment's Model: Accident EngineДокумент11 страницSite Date Running Code Equipment's Model: Accident EngineCws100% (1)
- Complete PEZA Citizen CharterДокумент41 страницаComplete PEZA Citizen CharterAngelica MacatangayОценок пока нет
- Gammxfa 000027Документ981 страницаGammxfa 000027laurentОценок пока нет
- ARO Drum Pumps Catalogue 2014Документ2 страницыARO Drum Pumps Catalogue 2014ratheeshОценок пока нет
- Model Mediasi Erp, SPM, SCM Dan Kinerja Perusahaan: Muhammad NawawiДокумент22 страницыModel Mediasi Erp, SPM, SCM Dan Kinerja Perusahaan: Muhammad Nawawiandi nurhidayatul islamiyahОценок пока нет
- Topic 3 - Slideshow Ead520Документ10 страницTopic 3 - Slideshow Ead520api-646717483Оценок пока нет
- Marina Mall Work Permit (20369)Документ1 страницаMarina Mall Work Permit (20369)Shahid FarooqОценок пока нет
- DBMS Full Form and Key ConceptsДокумент2 страницыDBMS Full Form and Key ConceptsanniОценок пока нет
- Conveyor Chains For Demanding ApplicationsДокумент24 страницыConveyor Chains For Demanding Applicationsnum0067Оценок пока нет
- Linear Programming ProblemДокумент39 страницLinear Programming ProblemJaya PrakashОценок пока нет
- Autodesk Maya Level 1 GuideДокумент46 страницAutodesk Maya Level 1 GuideMydearina MaidilОценок пока нет
- Technical Data - Ebara Pump - 200 DL 57.5 - 1Документ1 страницаTechnical Data - Ebara Pump - 200 DL 57.5 - 1hamparan nightwatchОценок пока нет
- AOZ1267QI-01: General Description FeaturesДокумент16 страницAOZ1267QI-01: General Description Featuresvictory_1410Оценок пока нет