Вам также может понравиться
- Electrical Machines: Lecture Notes for Electrical Machines CourseОт EverandElectrical Machines: Lecture Notes for Electrical Machines CourseОценок пока нет
- Induction and Synchronous Motor FundamentalsДокумент9 страницInduction and Synchronous Motor FundamentalsfitxvОценок пока нет
- Induction and Synchronous Motor FundamentalsДокумент10 страницInduction and Synchronous Motor Fundamentalshozipek5599100% (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationОт EverandStudy of a reluctance magnetic gearbox for energy storage system applicationРейтинг: 1 из 5 звезд1/5 (1)
- Synchronous Motor & Its Applications & Power Factor ImprovementДокумент4 страницыSynchronous Motor & Its Applications & Power Factor ImprovementYash BansalОценок пока нет
- Electric Motor Control: DC, AC, and BLDC MotorsОт EverandElectric Motor Control: DC, AC, and BLDC MotorsРейтинг: 4.5 из 5 звезд4.5/5 (19)
- Starting Methods of Syncronous Motor Criollo - RoggerДокумент7 страницStarting Methods of Syncronous Motor Criollo - RoggerRogger FabricioОценок пока нет
- Unit-2: (This Unit Covers Criteria P3, P6, M3) Synchronous MotorДокумент14 страницUnit-2: (This Unit Covers Criteria P3, P6, M3) Synchronous MotorMuhja AljaserОценок пока нет
- Skip To ContentДокумент17 страницSkip To Contentkidanemariam teseraОценок пока нет
- Syncronous MotorДокумент22 страницыSyncronous MotorSambhav JainОценок пока нет
- Synchronous MotorДокумент6 страницSynchronous MotorSelvasundar KumarОценок пока нет
- Synchronous MotorsДокумент16 страницSynchronous Motorsshinkentom2Оценок пока нет
- WEGSM1 ManualДокумент15 страницWEGSM1 Manualshinkentom2Оценок пока нет
- Electric Motor: Types of MotorsДокумент8 страницElectric Motor: Types of MotorsPlutoОценок пока нет
- DC Motor Speed System Modeling (Final Report)Документ41 страницаDC Motor Speed System Modeling (Final Report)Khubaib Ahmed80% (5)
- Powerpoint Presentation: Prasanta SarkarДокумент22 страницыPowerpoint Presentation: Prasanta SarkarMazhar HaqОценок пока нет
- Synchronous MotorДокумент6 страницSynchronous MotorPraveen Ramesh KarnamОценок пока нет
- Motor AppplicationДокумент17 страницMotor Appplicationtajul tonoyОценок пока нет
- Servo MechanismДокумент24 страницыServo Mechanismmushahid980Оценок пока нет
- Induction Motor: Principle of OperationДокумент7 страницInduction Motor: Principle of OperationAbhishek ChibОценок пока нет
- Servo Control Facts: Baldor Electric CompanyДокумент24 страницыServo Control Facts: Baldor Electric Companyafe2000must9083Оценок пока нет
- Servo Control Facts: Baldor Electric CompanyДокумент24 страницыServo Control Facts: Baldor Electric CompanyRizwan HameedОценок пока нет
- Synchronous MotorДокумент33 страницыSynchronous Motorvnyshreyas100% (2)
- Chapter 4 PDFДокумент40 страницChapter 4 PDFbroОценок пока нет
- Ac Motor N TypeДокумент28 страницAc Motor N TypesypultrazОценок пока нет
- Term Paper Of: Basic Electrical and Electronics ECE131Документ6 страницTerm Paper Of: Basic Electrical and Electronics ECE131Er Karan AroraОценок пока нет
- Asynchronous Slip-Ring Motor Synchronized With Permanent MagnetsДокумент8 страницAsynchronous Slip-Ring Motor Synchronized With Permanent MagnetsPraa DeepОценок пока нет
- Electrical MachineДокумент3 страницыElectrical MachineVikas KatiyarОценок пока нет
- Synchronous Motor: AC Motor Rotor Alternating Current Rotating Magnetic FieldДокумент5 страницSynchronous Motor: AC Motor Rotor Alternating Current Rotating Magnetic FieldDeepak SekarОценок пока нет
- Three Phase Induction MotorДокумент16 страницThree Phase Induction MotorPushan Kumar DattaОценок пока нет
- Assignment # 6Документ7 страницAssignment # 6Jay Ey100% (1)
- Theory: Electric Power Is Widely Used in Electric Traction For Many Reasons: It Is Easy To Control TheДокумент2 страницыTheory: Electric Power Is Widely Used in Electric Traction For Many Reasons: It Is Easy To Control TheAnamОценок пока нет
- Synchronous Motor Application and OperationДокумент3 страницыSynchronous Motor Application and OperationRajesh TipnisОценок пока нет
- DC Motor - Wikipedia, The Free EncyclopediaДокумент2 страницыDC Motor - Wikipedia, The Free Encyclopediadonodoni0008Оценок пока нет
- Mechatronics Ktu Module 6Документ36 страницMechatronics Ktu Module 6Adarsh s nairОценок пока нет
- Applications DC MotorДокумент16 страницApplications DC MotorSujeev GyawaliОценок пока нет
- "Induction Motor": A Technical Seminar Report OnДокумент24 страницы"Induction Motor": A Technical Seminar Report OnAmit BansalОценок пока нет
- Unit VДокумент7 страницUnit VMonte CarloОценок пока нет
- 3 ActuatorsonlineДокумент73 страницы3 ActuatorsonlineLloyd MontemayorОценок пока нет
- 6 Motor Basics HandoutДокумент18 страниц6 Motor Basics HandoutTan Yit KeongОценок пока нет
- CSPДокумент8 страницCSPmeghraj01100% (1)
- 19P205 Electrical MachinesДокумент34 страницы19P205 Electrical Machinessumanthlogn007Оценок пока нет
- Electrical Machine II: EEEEC11 (3 - 0 - 2) Semester 4Документ250 страницElectrical Machine II: EEEEC11 (3 - 0 - 2) Semester 4sanjoni.jainОценок пока нет
- Synchronous Motor Control PDFДокумент20 страницSynchronous Motor Control PDFPradeep_VashistОценок пока нет
- Induction Motor ReportДокумент13 страницInduction Motor ReportShivani SinghОценок пока нет
- Chapter 1 - Introduction To AC MotorДокумент13 страницChapter 1 - Introduction To AC MotorJiachyi YeohОценок пока нет
- Answers 4,5,6Документ8 страницAnswers 4,5,6Mohsin TariqОценок пока нет
- Classification of Synchronous GeneratorДокумент5 страницClassification of Synchronous Generatormuhammad afaq IEEEОценок пока нет
- AC Motor - Definition, Working, AC Motor Parts, ApplicationsДокумент7 страницAC Motor - Definition, Working, AC Motor Parts, ApplicationsmanjuОценок пока нет
- Share ElectricalДокумент7 страницShare ElectricalIsaac Stephen ApenyoОценок пока нет
- Electrical Machines Induction and Synchronous MachinesДокумент42 страницыElectrical Machines Induction and Synchronous MachinesYoshua DylanОценок пока нет
- Reaction PaperДокумент6 страницReaction PaperAngelo Escoro Dante100% (1)
- Synchronous Motor: ET10203A: Basic Electrical EngineeringДокумент16 страницSynchronous Motor: ET10203A: Basic Electrical EngineeringAjinkya GholveОценок пока нет
- Synchronous Motor PROJECTДокумент9 страницSynchronous Motor PROJECTMd Samee MОценок пока нет
- Electrical Motor (1) DДокумент20 страницElectrical Motor (1) Drksamy0102Оценок пока нет
- Synchronous Motor ControlДокумент19 страницSynchronous Motor ControlMohamed RashidОценок пока нет
- Faculty of Engineering Mechanical Engineering Department: Strength of Materials LABДокумент5 страницFaculty of Engineering Mechanical Engineering Department: Strength of Materials LABMohammed KhouliОценок пока нет
- Chapter 12 Marketing Channels Delivering Customer Value 14ed NewДокумент21 страницаChapter 12 Marketing Channels Delivering Customer Value 14ed NewMohammed KhouliОценок пока нет
- EE 306 - Electrical Engineering LaboratoryДокумент3 страницыEE 306 - Electrical Engineering LaboratoryMohammed KhouliОценок пока нет
- EE 306 - Electrical Engineering LaboratoryДокумент7 страницEE 306 - Electrical Engineering LaboratoryMohammed KhouliОценок пока нет
- EE 306 - Electrical Engineering LaboratoryДокумент6 страницEE 306 - Electrical Engineering LaboratoryMohammed KhouliОценок пока нет
- MKT Second TBДокумент83 страницыMKT Second TBMohammed KhouliОценок пока нет
- Horisantal Vs Vertical EquityДокумент1 страницаHorisantal Vs Vertical EquityMohammed KhouliОценок пока нет
- EE 306 - Electrical Engineering LaboratoryДокумент7 страницEE 306 - Electrical Engineering LaboratoryMohammed KhouliОценок пока нет
- Orca Share Media1483233841562Документ21 страницаOrca Share Media1483233841562Mohammed KhouliОценок пока нет
- Chapter 5 تسويقДокумент53 страницыChapter 5 تسويقMohammed KhouliОценок пока нет
- Test Bank For QuickBooks Pro 2013 A Complete Course 14E 14th EditionДокумент6 страницTest Bank For QuickBooks Pro 2013 A Complete Course 14E 14th EditionMohammed Khouli100% (1)
- ACC Test Bank Questions Test 2Документ75 страницACC Test Bank Questions Test 2Mohammed KhouliОценок пока нет
- Advanced Chapter 5 Test BankДокумент16 страницAdvanced Chapter 5 Test BankMohammed Khouli50% (2)
- تسويق شابتر 15aДокумент41 страницаتسويق شابتر 15aMohammed KhouliОценок пока нет
- تسويق شابتر 3Документ42 страницыتسويق شابتر 3Mohammed KhouliОценок пока нет
- Chapter 10Документ45 страницChapter 10Mohammed KhouliОценок пока нет
- Chapter 5-Target Market Segmentation and Evaluation: EssayДокумент48 страницChapter 5-Target Market Segmentation and Evaluation: EssayMohammed KhouliОценок пока нет
- ch15 2e Kieso TBДокумент46 страницch15 2e Kieso TBMohammed Khouli100% (3)
- حلول تمارين محاسبة الشركات أشخاص و أموالДокумент1 страницаحلول تمارين محاسبة الشركات أشخاص و أموالMohammed Khouli0% (1)
- Ac Power Distribution Switch BoardДокумент26 страницAc Power Distribution Switch BoardAnonymous nL0QNemdIОценок пока нет
- Energy Conversion: Ruben J. Dichoso InstructorДокумент24 страницыEnergy Conversion: Ruben J. Dichoso InstructorCj LlemosОценок пока нет
- Ceramic Chip/Mil-Prf-55681: Capacitor Outline DrawingsДокумент10 страницCeramic Chip/Mil-Prf-55681: Capacitor Outline DrawingsDeepa DevarajОценок пока нет
- HS014 - Portable Electrical Equipment InspectorДокумент1 страницаHS014 - Portable Electrical Equipment InspectorRetselisitsoe100% (4)
- The Searl Effect GeneratorДокумент2 страницыThe Searl Effect GeneratorSrinath Ars100% (2)
- DIY 150W Inverter: 12v DC TO 220v AC. 150 Watts ofДокумент14 страницDIY 150W Inverter: 12v DC TO 220v AC. 150 Watts ofvipinОценок пока нет
- Bueno Eaton-Secondary-Unit-Substation-Design-GuideДокумент48 страницBueno Eaton-Secondary-Unit-Substation-Design-GuideGEISON JUNIOR CAJA GUERRAОценок пока нет
- DTC P0504 Brake Switch "A" / "B" Correlation: DescriptionДокумент4 страницыDTC P0504 Brake Switch "A" / "B" Correlation: Descriptionmike chenОценок пока нет
- SDA1 SSR 무접점릴레이 .유니온Документ1 страницаSDA1 SSR 무접점릴레이 .유니온Chawki DerouicheОценок пока нет
- Micro Electro Mechanical Systems: S. MeenatchisundaramДокумент15 страницMicro Electro Mechanical Systems: S. MeenatchisundaramkksundariОценок пока нет
- Edc Unit 4 Transistor BiasingДокумент19 страницEdc Unit 4 Transistor BiasingPushpalathaОценок пока нет
- Cable Size CalculatorДокумент13 страницCable Size CalculatorSamer ChahroukОценок пока нет
- CJJ33 DLДокумент8 страницCJJ33 DLapsОценок пока нет
- Littelfuse RC Snubber Networks For Thyristor Power Control and Transient Suppression PDFДокумент22 страницыLittelfuse RC Snubber Networks For Thyristor Power Control and Transient Suppression PDFWafik RkabОценок пока нет
- Rmo RMG PDFДокумент21 страницаRmo RMG PDFTiago LigabueeОценок пока нет
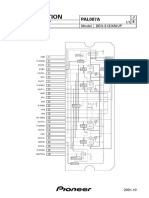
- PAL007A PioneerДокумент1 страницаPAL007A PioneerIsmael Bratti BussoloОценок пока нет
- Legrand Main Price List April 2022Документ252 страницыLegrand Main Price List April 2022Ujwal Elijah GurramОценок пока нет
- Semiconductors - DPP 01Документ3 страницыSemiconductors - DPP 01mv7602456Оценок пока нет
- MLT Inverters Brochure Powerstar 20180601Документ2 страницыMLT Inverters Brochure Powerstar 20180601Rabee AlademeОценок пока нет
- Inverter Basics 8-13-09 PDFДокумент4 страницыInverter Basics 8-13-09 PDFmuhaned190Оценок пока нет
- LM386 Low Voltage Audio Power AmplifierДокумент10 страницLM386 Low Voltage Audio Power Amplifierapple.scotch.fool3550Оценок пока нет
- Three Phase Capacitor Unit Brochure (2003-06)Документ2 страницыThree Phase Capacitor Unit Brochure (2003-06)protectionworkОценок пока нет
- Salus Controls Programmable Room Thermostat With RF (Volt Free) Model 091FLRFДокумент28 страницSalus Controls Programmable Room Thermostat With RF (Volt Free) Model 091FLRFMihailo Vuk MarinkovićОценок пока нет
- Form Service Report ForkliftДокумент1 страницаForm Service Report Forkliftgalih pangestuОценок пока нет
- Marathon Gen-744RSL4058 480V 60hzДокумент2 страницыMarathon Gen-744RSL4058 480V 60hzjesus_rs01Оценок пока нет
- Descriptions: A-56590 E-1321/02 Fanuc Ac Spindle Motor SERIES (Sensor-Less Type)Документ19 страницDescriptions: A-56590 E-1321/02 Fanuc Ac Spindle Motor SERIES (Sensor-Less Type)Carlos OrtegaОценок пока нет
- Physics Investigatory Project ReportДокумент12 страницPhysics Investigatory Project ReportAnanthakrishna Gopal68% (22)
- 715p Orange DropДокумент7 страниц715p Orange Dropsas999333Оценок пока нет
- EasyPact MVS - MVS08N3NF2LДокумент3 страницыEasyPact MVS - MVS08N3NF2LsaravananОценок пока нет
- SKN 60 F 12 SKR 60 F 12 SKN 60 F 14 SKR 60 F 14 SKN 60 F 15 SKR 60 F 15Документ4 страницыSKN 60 F 12 SKR 60 F 12 SKN 60 F 14 SKR 60 F 14 SKN 60 F 15 SKR 60 F 15Cristian ArieelОценок пока нет