Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Mass Volume Density Notes PDFДокумент17 страницMass Volume Density Notes PDFNadya PutriОценок пока нет
- Origin Have A Negative Y-Value, and Points Below A Positive Y-Value. We Have That, ForДокумент4 страницыOrigin Have A Negative Y-Value, and Points Below A Positive Y-Value. We Have That, ForVictor CoronelОценок пока нет
- ProperДокумент21 страницаProperPhysics loverОценок пока нет
- Problems On Resultant of Two Forces Acting at A Point (Parallelogram Law of Forces) Tutorial ProblemsДокумент2 страницыProblems On Resultant of Two Forces Acting at A Point (Parallelogram Law of Forces) Tutorial ProblemsSudhakar UppalapatiОценок пока нет
- Learning Module 2 CE 245Документ20 страницLearning Module 2 CE 245Benmark JabayОценок пока нет
- Week 2 - Piping Friction Loss 1t 2022-2023Документ113 страницWeek 2 - Piping Friction Loss 1t 2022-2023Mcoy DomingoОценок пока нет
- CRKTCT - 19. A Capacitor With Capacitance 0.1F in An RC Circuit Is Initially Charged Up ToДокумент5 страницCRKTCT - 19. A Capacitor With Capacitance 0.1F in An RC Circuit Is Initially Charged Up ToWilburОценок пока нет
- Aits 1819 FT Ix Jeea Paper 1 PCM SolnsДокумент14 страницAits 1819 FT Ix Jeea Paper 1 PCM SolnsKartik Gupta100% (1)
- CZTS Scaps - BДокумент7 страницCZTS Scaps - BMainul HossainОценок пока нет
- Mass Transfer 1 CLB 20804Документ54 страницыMass Transfer 1 CLB 20804KumaranОценок пока нет
- Electrical Vendor Directory Jan 2020 To Jun 2020Документ231 страницаElectrical Vendor Directory Jan 2020 To Jun 2020sumitshyamal0% (1)
- API GravityДокумент4 страницыAPI GravitySridaar KanaiyaОценок пока нет
- Frequency Response: Reading: Sedra & Smith: Chapter 1.6, Chapter 3.6 and Chapter 9 (MOS Portions)Документ40 страницFrequency Response: Reading: Sedra & Smith: Chapter 1.6, Chapter 3.6 and Chapter 9 (MOS Portions)pravin patilОценок пока нет
- Basic Electrical Engineering: BY R. Sivaprasad, Lecturer in Eee, SVGP TirupathiДокумент29 страницBasic Electrical Engineering: BY R. Sivaprasad, Lecturer in Eee, SVGP Tirupathirathina4careerОценок пока нет
- University of Calicut: Read:-1. U.O.No - GAI/J2/3601/08 Vol II Dated 19.06.2009Документ54 страницыUniversity of Calicut: Read:-1. U.O.No - GAI/J2/3601/08 Vol II Dated 19.06.2009LakshmiVishwanathanОценок пока нет
- Energetica ExaminationДокумент11 страницEnergetica ExaminationDwi NicHeОценок пока нет
- Circuits Conductors / Insulators: SOL 4.3 Electricity Released Test Questions 2002-2012Документ3 страницыCircuits Conductors / Insulators: SOL 4.3 Electricity Released Test Questions 2002-2012rcsndgzmnОценок пока нет
- Heat Balance in Fusion WeldingДокумент4 страницыHeat Balance in Fusion WeldingjohanОценок пока нет
- Single Family DwellingДокумент27 страницSingle Family Dwellingjayson platinoОценок пока нет
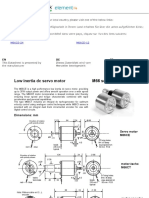
- M66ce-24 M66ce-12Документ6 страницM66ce-24 M66ce-12TECH NEWSОценок пока нет
- Schematic Diagram of 220 /132 /54 KV Traction SubstationДокумент1 страницаSchematic Diagram of 220 /132 /54 KV Traction SubstationjitendraОценок пока нет
- Projectile Motion PDFДокумент19 страницProjectile Motion PDFRamesh BadamОценок пока нет
- Inverting Power Supply Using A TPS54202 BuckДокумент25 страницInverting Power Supply Using A TPS54202 Buckg4okkОценок пока нет
- Experimental Studies On The Effect of Using Phase Change Material in Salinity-Gradient Solar PondДокумент11 страницExperimental Studies On The Effect of Using Phase Change Material in Salinity-Gradient Solar PondVIJAY DHARANОценок пока нет
- SCR Unit Chapter 3Документ48 страницSCR Unit Chapter 3stashkinvalriy100% (2)
- SR Inter IPE Question Bank Chapter-XII (DUAL NATURE OF RADIATION AND MATTER)Документ1 страницаSR Inter IPE Question Bank Chapter-XII (DUAL NATURE OF RADIATION AND MATTER)sojakoj867Оценок пока нет
- Department of Computer Engineering 22215 EEC MCQ (Elements of Electrical Engineering)Документ34 страницыDepartment of Computer Engineering 22215 EEC MCQ (Elements of Electrical Engineering)Viraj TiwareОценок пока нет
- Hall Effect and Hall VoltageДокумент2 страницыHall Effect and Hall VoltageHimanshu TyagiОценок пока нет
- Unified Power Flow ControllerДокумент17 страницUnified Power Flow ControllerAdeniji Olusegun50% (2)