Вам также может понравиться
- CinematicaДокумент9 страницCinematicaCristianОценок пока нет
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsОт EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsОценок пока нет
- Cinematic A Del Robot y Control CinematicoДокумент22 страницыCinematic A Del Robot y Control CinematicoElihu Henri Ostos GarciaОценок пока нет
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorОт EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorОценок пока нет
- Control CinematicoДокумент6 страницControl CinematicoDeivi Vàsquez PОценок пока нет
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209От EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Рейтинг: 1 из 5 звезд1/5 (2)
- Control CinemáticoДокумент13 страницControl CinemáticoKenny Jiménez RuizОценок пока нет
- Detección de colisiones: Comprensión de las intersecciones visuales en visión por computadoraОт EverandDetección de colisiones: Comprensión de las intersecciones visuales en visión por computadoraОценок пока нет
- RI Unidad 5 FinalДокумент36 страницRI Unidad 5 FinalAlejandro PereyraОценок пока нет
- Desenfoque de movimiento: Explorando la dinámica de la visión por computadora: se revela el desenfoque de movimientoОт EverandDesenfoque de movimiento: Explorando la dinámica de la visión por computadora: se revela el desenfoque de movimientoОценок пока нет
- Funciones Del Control CinematicoДокумент6 страницFunciones Del Control Cinematicojuan pablo dominguez arellano100% (1)
- Operaciones auxiliares de servicios de la aeronave. TMVO0109От EverandOperaciones auxiliares de servicios de la aeronave. TMVO0109Оценок пока нет
- Control Cinemartico Del RobotДокумент7 страницControl Cinemartico Del Robotakuma119115Оценок пока нет
- Planificación de Trayectorias en El Espacio de Las ArticulacionesДокумент2 страницыPlanificación de Trayectorias en El Espacio de Las ArticulacionesALEXОценок пока нет
- Perfil de VelocidadДокумент7 страницPerfil de VelocidadVíctor Beltrán BarreraОценок пока нет
- UNIDAD 6 RoboticaДокумент10 страницUNIDAD 6 RoboticaAlberto Sánchez Delgado100% (1)
- Lab Nº3 - Control Cinemático de Robots - Trayectorias - V2017-ParДокумент6 страницLab Nº3 - Control Cinemático de Robots - Trayectorias - V2017-ParFabricio BenaventeОценок пока нет
- Plataforma StewartДокумент2 страницыPlataforma StewartCrìsthíàn Dánìél Labrador LeonОценок пока нет
- 3734660Документ37 страниц3734660Christian Acero BarreraОценок пока нет
- Cinematicaa PDFДокумент13 страницCinematicaa PDFJuan Nicolas Chavez ReyesОценок пока нет
- Trabajo ManufacturaДокумент4 страницыTrabajo ManufacturaLuis Antonio100% (1)
- Sistemas RobotizadosДокумент5 страницSistemas RobotizadospamaisteОценок пока нет
- LabNo4 Mec Retorno Rapido 15feb2014Документ8 страницLabNo4 Mec Retorno Rapido 15feb2014JOELОценок пока нет
- Sistema de Control-Jose OvallesДокумент6 страницSistema de Control-Jose OvallesJ_OvallesОценок пока нет
- Tarea 2 RoboticaДокумент8 страницTarea 2 RoboticaCarlos Flores GonzálezОценок пока нет
- Control CinematicДокумент10 страницControl CinematicCristian ArciniegaОценок пока нет
- Pia Arqui - ReporteДокумент19 страницPia Arqui - ReporteDavid AlvarezОценок пока нет
- Articulo de Robot CuadrupedoДокумент5 страницArticulo de Robot CuadrupedoLupillo'sGRОценок пока нет
- Trayectorias Punto A PuntoДокумент10 страницTrayectorias Punto A PuntoOSCAR RICARDO MENDEZ SOTOОценок пока нет
- SP - MecanismosДокумент16 страницSP - MecanismosMiguel Octavio Águila RodríguezОценок пока нет
- Simulación y Control de Robots Practica 6Документ18 страницSimulación y Control de Robots Practica 6carlos.otiniano9811Оценок пока нет
- AutitoДокумент15 страницAutitoHeber Andres GuzmanОценок пока нет
- Robótica Robot ARMXДокумент4 страницыRobótica Robot ARMXAnthony Floreano AlfaroОценок пока нет
- Emit Emit-421 TrabajofinalДокумент10 страницEmit Emit-421 TrabajofinalJesus LlontopОценок пока нет
- Planificación de TrayectoriasДокумент5 страницPlanificación de TrayectoriasCristhian Flores0% (1)
- Mecanica - Reporte FinishДокумент13 страницMecanica - Reporte FinishJuan Manuel González GarciaОценок пока нет
- TeoriaДокумент5 страницTeoriaJhon FonteОценок пока нет
- Práctica 9Документ17 страницPráctica 9Aguilar Alvarez Fabian EduardoОценок пока нет
- Unidad 5 RoboticaДокумент16 страницUnidad 5 RoboticaLuis CastilloОценок пока нет
- 2014 Ponencia Amdm Diseno Construccion Robot GusanoДокумент5 страниц2014 Ponencia Amdm Diseno Construccion Robot GusanoJorge E. GutierrezОценок пока нет
- Robotica IndustrialДокумент19 страницRobotica Industrialrivac85Оценок пока нет
- LabNo3 Mec Retorno RapidoДокумент9 страницLabNo3 Mec Retorno RapidoLorena CorreaОценок пока нет
- Tipos de MotorДокумент25 страницTipos de MotorHerbert Lee CovarrubiasОценок пока нет
- Servo Motor EsДокумент20 страницServo Motor EsJoseAntonioОценок пока нет
- Trayectoria LinealДокумент7 страницTrayectoria LinealOscar Cortes100% (1)
- Tci401-297-223081 Descargable Semana 2Документ21 страницаTci401-297-223081 Descargable Semana 2Aldo Diaz MoralesОценок пока нет
- MecanismoДокумент3 страницыMecanismoVielka RodriguezОценок пока нет
- Laboratorio de ServomotoresДокумент16 страницLaboratorio de ServomotoresJULIET MUNOZ GARCIAОценок пока нет
- TrayectoriasssspdfДокумент9 страницTrayectoriasssspdfOSCAR RICARDO MENDEZ SOTOОценок пока нет
- cm2 s3. ImprimibleДокумент26 страницcm2 s3. ImprimibleAlejandra janethОценок пока нет
- Actividad 3 ServomecanismosДокумент15 страницActividad 3 Servomecanismosanalucia.guajardovrlОценок пока нет
- Capitulo6 Barrientos 2007pptwin ESTДокумент8 страницCapitulo6 Barrientos 2007pptwin ESTCarlos LealОценок пока нет
- Balanceo de Rotores 4Документ7 страницBalanceo de Rotores 4Ricardo CampaОценок пока нет
- Fundamento de RoboticaДокумент39 страницFundamento de RoboticaISAAC OSUNA MARMOLEJOОценок пока нет
- Preguntas Guia de RoboticaДокумент5 страницPreguntas Guia de RoboticaDaniel Osis0% (1)
- 088 Roberts Olcay PeterДокумент19 страниц088 Roberts Olcay PeterRed Ingenieros Mecánicos ElectromecánicosОценок пока нет
- 13 Chapter 3 Kinematics of BackhoeДокумент42 страницы13 Chapter 3 Kinematics of BackhoeNathan DrakeОценок пока нет
- Investigación Sobre Trayectorias Paramétricas, Perfil Trapezoidal y Restricciones de TrayectoriasДокумент9 страницInvestigación Sobre Trayectorias Paramétricas, Perfil Trapezoidal y Restricciones de TrayectoriasLeonardo Romo100% (1)
- Planificación de Trayectorias en Robots-Efren Alamillo MataДокумент23 страницыPlanificación de Trayectorias en Robots-Efren Alamillo MataEfren Alamillo MataОценок пока нет
- Guia1 - Conjuntos NumericosДокумент9 страницGuia1 - Conjuntos Numericosjesus david briñez bersingerОценок пока нет
- 01 09 Fases Del Proceso TecnologicoДокумент6 страниц01 09 Fases Del Proceso Tecnologicojesus david briñez bersingerОценок пока нет
- Expresiones AlgebraicasДокумент45 страницExpresiones Algebraicasjesus david briñez bersingerОценок пока нет
- Ecuacion General de Segundo GradoДокумент21 страницаEcuacion General de Segundo Gradojesus david briñez bersingerОценок пока нет
- Cartas AsmДокумент5 страницCartas Asmjesus david briñez bersingerОценок пока нет
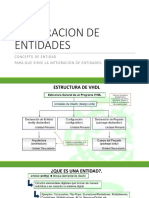
- Integracion de Entidades 16 de Mayo PDFДокумент27 страницIntegracion de Entidades 16 de Mayo PDFjesus david briñez bersingerОценок пока нет
- Máquinas de Estados FinitoДокумент10 страницMáquinas de Estados Finitojesus david briñez bersingerОценок пока нет
- Relación Existente Entre Los Planteamientos Teóricos y La Práctica PedagógicaДокумент1 страницаRelación Existente Entre Los Planteamientos Teóricos y La Práctica Pedagógicajesus david briñez bersingerОценок пока нет
- Flip Flops 31 de MarzoДокумент6 страницFlip Flops 31 de Marzojesus david briñez bersingerОценок пока нет
- MODELOS CINEMATICOS DE ROBOT S Algoritmo de Denavit-HartenbergДокумент11 страницMODELOS CINEMATICOS DE ROBOT S Algoritmo de Denavit-Hartenbergjesus david briñez bersingerОценок пока нет
- Circuitos Combinacionales Con VHDL - CaseДокумент6 страницCircuitos Combinacionales Con VHDL - Casejesus david briñez bersingerОценок пока нет
- Programando en VHDLДокумент9 страницProgramando en VHDLjesus david briñez bersingerОценок пока нет
- Jesus Briñez Act2 InformeДокумент9 страницJesus Briñez Act2 Informejesus david briñez bersingerОценок пока нет
- JuegoДокумент6 страницJuegojesus david briñez bersingerОценок пока нет
- Cemento CPC30RRSДокумент2 страницыCemento CPC30RRSMary Fer MHОценок пока нет
- Práctica 5Документ3 страницыPráctica 5Andy SBОценок пока нет
- Aspecto Ambiental de La Cuenca CaplinaДокумент5 страницAspecto Ambiental de La Cuenca CaplinaDeyly Zaquinaula ReyesОценок пока нет
- Sesión 2 Método ABCДокумент12 страницSesión 2 Método ABCBrayan jhunior SAMAYANI ESPINOZAОценок пока нет
- Historia 1 MДокумент3 страницыHistoria 1 MDanielaОценок пока нет
- Fisio 123Документ7 страницFisio 123Ximena SantosОценок пока нет
- Informe Aceites EsencialesДокумент8 страницInforme Aceites EsencialesAugusto Muñoz VillarrealОценок пока нет
- 1 Minado, Transorte y Molienda Shery y XiomiДокумент10 страниц1 Minado, Transorte y Molienda Shery y XiomiGabriel Rodríguez SuttaОценок пока нет
- AST - Trabajo de Reemplazo de Panalit Almacen de VOPAKДокумент3 страницыAST - Trabajo de Reemplazo de Panalit Almacen de VOPAKLissyGarciaОценок пока нет
- Paper Material AutorreparablesДокумент2 страницыPaper Material AutorreparablesDanny Acosta FrayleОценок пока нет
- 2015 Spanish Envejecer Menos - CompressДокумент18 страниц2015 Spanish Envejecer Menos - CompressEDUARDOОценок пока нет
- FrutasДокумент10 страницFrutasMarisol JimenezОценок пока нет
- Trabajo Del OxigenoДокумент10 страницTrabajo Del OxigenoLuis Alberto Tello CequeroОценок пока нет
- Examen Parcial de Administración de OperacionesДокумент2 страницыExamen Parcial de Administración de OperacionesNorma Melina Rodríguez JuárezОценок пока нет
- Practica 4 Rectificacion ContinúaДокумент16 страницPractica 4 Rectificacion ContinúaAlfredo TlapaleОценок пока нет
- Plan de Respuesta Ante Emergencias FaeДокумент44 страницыPlan de Respuesta Ante Emergencias FaeFernando Calvo MontañoОценок пока нет
- IKER JIMENEZ - Enigmas Sin ResolverДокумент183 страницыIKER JIMENEZ - Enigmas Sin Resolveredicioneshalbrane100% (1)
- S1.2 Actividad Aplicativa 02 Caso Shell - ESPДокумент7 страницS1.2 Actividad Aplicativa 02 Caso Shell - ESPVladimir Noriega ChingОценок пока нет
- Capítulo 9. TEORIA DE INVENTARIOS o STOCK.Документ19 страницCapítulo 9. TEORIA DE INVENTARIOS o STOCK.naru 802Оценок пока нет
- Universidad Nacional Federico VillarrealДокумент27 страницUniversidad Nacional Federico VillarrealJuan AntoniioОценок пока нет
- Piezómetros de Casa Grande IncompletoДокумент12 страницPiezómetros de Casa Grande IncompletoNEHEMIASОценок пока нет
- FisurasДокумент7 страницFisurasCinthiaОценок пока нет
- Practica 4 y 5 Lab Fisica 4Документ12 страницPractica 4 y 5 Lab Fisica 4VictOor AlonsoОценок пока нет
- Baja Montante Ø 2" Y Sube Tub. Vent. Ø 2"Документ1 страницаBaja Montante Ø 2" Y Sube Tub. Vent. Ø 2"Romario Villasante ValderramaОценок пока нет
- Plan de TrabajoДокумент1 страницаPlan de TrabajoMario Aguirre100% (1)
- INTERVENCIÓN BREVE para El Consumo de Riesgo y Perjudicial de AlcoholДокумент52 страницыINTERVENCIÓN BREVE para El Consumo de Riesgo y Perjudicial de Alcoholpsic_molina-1Оценок пока нет
- PROYECTO VIDA SALUDABLE BUENA ALIMENTACION Williams LДокумент32 страницыPROYECTO VIDA SALUDABLE BUENA ALIMENTACION Williams LRonald SolisОценок пока нет
- Salas de CirugiaДокумент862 страницыSalas de CirugiaRONALD JAVIER LOPEZ RIOSОценок пока нет
- Voluntad en La Naturaleza, SchopenhauerДокумент2 страницыVoluntad en La Naturaleza, SchopenhauerSlania SsОценок пока нет
- Importancia de La Mediana y PequeñaДокумент9 страницImportancia de La Mediana y PequeñaAgustin San SebastianОценок пока нет
- Influencia. La psicología de la persuasiónОт EverandInfluencia. La psicología de la persuasiónРейтинг: 4.5 из 5 звезд4.5/5 (14)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleОт EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleРейтинг: 5 из 5 звезд5/5 (3)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroОт EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroРейтинг: 4 из 5 звезд4/5 (1)
- Cultura y clima: fundamentos para el cambio en la organizaciónОт EverandCultura y clima: fundamentos para el cambio en la organizaciónОценок пока нет
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteОт EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteРейтинг: 1 из 5 звезд1/5 (1)
- Guía práctica para la refracción ocularОт EverandGuía práctica para la refracción ocularРейтинг: 5 из 5 звезд5/5 (2)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressОт EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressРейтинг: 5 из 5 звезд5/5 (1)
- Armónicas en Sistemas Eléctricos IndustrialesОт EverandArmónicas en Sistemas Eléctricos IndustrialesРейтинг: 4.5 из 5 звезд4.5/5 (12)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaОт EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaРейтинг: 4.5 из 5 звезд4.5/5 (117)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosОт EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosРейтинг: 4 из 5 звезд4/5 (16)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másОт EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másРейтинг: 2.5 из 5 звезд2.5/5 (3)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalОт EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalРейтинг: 5 из 5 звезд5/5 (3)
- GuíaBurros Microsoft Excel: Todo lo que necesitas saber sobre esta potente hoja de cálculoОт EverandGuíaBurros Microsoft Excel: Todo lo que necesitas saber sobre esta potente hoja de cálculoРейтинг: 3.5 из 5 звезд3.5/5 (6)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesОт EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialОт EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialРейтинг: 4.5 из 5 звезд4.5/5 (11)
- Inteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaОт EverandInteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaAna Isabel Sánchez DíezРейтинг: 4 из 5 звезд4/5 (3)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.От EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Рейтинг: 4 из 5 звезд4/5 (51)
- Scrum Las Estrategias del Juego: Es Póker, No AjedrezОт EverandScrum Las Estrategias del Juego: Es Póker, No AjedrezРейтинг: 5 из 5 звезд5/5 (1)
- Crear una web desde cero. Paso a paso con Joomla!. 2ª Edición Actualizada: Gráficos y diseño webОт EverandCrear una web desde cero. Paso a paso con Joomla!. 2ª Edición Actualizada: Gráficos y diseño webРейтинг: 4.5 из 5 звезд4.5/5 (2)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenОт EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenРейтинг: 5 из 5 звезд5/5 (8)
- Cómo ser una Persona más Sociable: Aprende a hablar con cualquiera sin temor e incrementa por completo tu inteligencia socialОт EverandCómo ser una Persona más Sociable: Aprende a hablar con cualquiera sin temor e incrementa por completo tu inteligencia socialРейтинг: 4.5 из 5 звезд4.5/5 (34)