Вам также может понравиться
- Ejercicio 5 GuiaДокумент3 страницыEjercicio 5 GuiaClaudio PerezОценок пока нет
- Aplicaciones en FisicaДокумент8 страницAplicaciones en FisicaAlvaro RoblesОценок пока нет
- Practica 3 Variables Cinematica - PKCC - MIMH - IJGOДокумент13 страницPractica 3 Variables Cinematica - PKCC - MIMH - IJGOPaulina CamachoChavezОценок пока нет
- Principios de transferencia de cantidad de movimientoОт EverandPrincipios de transferencia de cantidad de movimientoОценок пока нет
- Guía 4: Cinemática en 2 Dim (Parabólico)Документ17 страницGuía 4: Cinemática en 2 Dim (Parabólico)Yenifer RosalesОценок пока нет
- Movimiento en El Espacio - Velocidad y Aceleracion y Curvatura de Flexion en PolaresДокумент3 страницыMovimiento en El Espacio - Velocidad y Aceleracion y Curvatura de Flexion en PolaresTomas TRОценок пока нет
- Cap3 FisicaДокумент30 страницCap3 FisicaAlCapone ChecoОценок пока нет
- Cap3 Movimiento en Dos Dimensiones RДокумент24 страницыCap3 Movimiento en Dos Dimensiones RDalia SoriaОценок пока нет
- MCVV2 U2 A2 JuhlДокумент4 страницыMCVV2 U2 A2 JuhlOlivia Hernandez0% (1)
- Movimiento en Dos Dimensiones 100Документ30 страницMovimiento en Dos Dimensiones 100Angel SalamancaОценок пока нет
- Mecánica I. Notas de clase sobre conceptos básicos de cinemáticaДокумент32 страницыMecánica I. Notas de clase sobre conceptos básicos de cinemáticaJiménez Verdín Mralik EstebanОценок пока нет
- Cinem Ej 8 de La Guia Resuelto PDFДокумент8 страницCinem Ej 8 de La Guia Resuelto PDFNerina ZaidelОценок пока нет
- CurvasДокумент5 страницCurvasAlejandroo2797Оценок пока нет
- Tema 1Документ17 страницTema 1Javier Pérez García -Оценок пока нет
- 01.cinematica MRU.y.MRUA 23-24M&FДокумент9 страниц01.cinematica MRU.y.MRUA 23-24M&Fignaciolangarica68Оценок пока нет
- Cálculo Vectorial Velocidad AceleracionДокумент5 страницCálculo Vectorial Velocidad AceleracionCésar SosaОценок пока нет
- Examen 2do ParcialДокумент6 страницExamen 2do ParcialStephanny Cedeño VázquezОценок пока нет
- Entregable N°1 2021 AДокумент4 страницыEntregable N°1 2021 AJuanMegoОценок пока нет
- Proyección triángulo plano XYДокумент2 страницыProyección triángulo plano XYBJ SCОценок пока нет
- Taller 2 Cal3Документ2 страницыTaller 2 Cal3Jhon Esteban PossoОценок пока нет
- Experimento 1 Fisica ExperimentalДокумент6 страницExperimento 1 Fisica ExperimentalElias BudgetОценок пока нет
- Modulo de Cinematica de Un Punto Material - 2014 (Ultimo)Документ38 страницModulo de Cinematica de Un Punto Material - 2014 (Ultimo)ALEX JHAMPIER SALDA�A PEREZОценок пока нет
- Ejercicio1 - Señales y SistemasДокумент6 страницEjercicio1 - Señales y SistemasMartinSuarezОценок пока нет
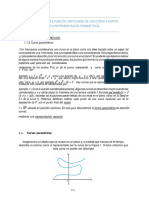
- Obtención de La Ecuación Cartesiana de Una Curva A Partir de Su Representacion ParamétricaДокумент17 страницObtención de La Ecuación Cartesiana de Una Curva A Partir de Su Representacion ParamétricaRosa M. Horna Vargas50% (2)
- Trabajo CVE 2021 II AnswersДокумент11 страницTrabajo CVE 2021 II AnswersKimberly mosha R.Оценок пока нет
- Diferenciación de funciones vectoriales de una variableДокумент19 страницDiferenciación de funciones vectoriales de una variableZeRgio Checo PeRezОценок пока нет
- Entregable 1 2023 BДокумент5 страницEntregable 1 2023 BMENDEZ QUEVEDO DIEGO ALONSO ANTONIOОценок пока нет
- Graficación en Dos y Tres DimensionesДокумент32 страницыGraficación en Dos y Tres DimensionesAndres Andres Barreto Moreno100% (1)
- Curvas ParametricasДокумент1 страницаCurvas ParametricasJuan DavidОценок пока нет
- Cinemática - TeoríaДокумент48 страницCinemática - Teoríaramon gomezОценок пока нет
- Practica 5Документ11 страницPractica 5Leidy AriasОценок пока нет
- Reporte 3Документ9 страницReporte 3Auron ViejoОценок пока нет
- 1.-Funciones Vectoriales PDFДокумент30 страниц1.-Funciones Vectoriales PDFCésar MarinОценок пока нет
- Curvas Parametricas y Funciones Parametricas de Un ParametroДокумент20 страницCurvas Parametricas y Funciones Parametricas de Un ParametroIvanОценок пока нет
- Parametrizacion PDFДокумент30 страницParametrizacion PDFValentina EspinozaОценок пока нет
- Práctica 03 - G6 - Movimiento de Un ProyectilДокумент6 страницPráctica 03 - G6 - Movimiento de Un ProyectilHUARIPATA ASCATE JORGE ENRIQUEОценок пока нет
- Cinemática de la partícula: problemas resueltos de física IДокумент4 страницыCinemática de la partícula: problemas resueltos de física ICaracol RHОценок пока нет
- Infografia Curvas ParametricasДокумент1 страницаInfografia Curvas ParametricasJuan DavidОценок пока нет
- Curvas_ParametrizadasДокумент4 страницыCurvas_ParametrizadasJohan RivasОценок пока нет
- Taller #1 de Señales y SistemasДокумент9 страницTaller #1 de Señales y SistemasYan BejaranoОценок пока нет
- Ejercicio1 Jarol LlanosДокумент8 страницEjercicio1 Jarol LlanosDiiego Jiménez GonzalezОценок пока нет
- Informe Lanzamiento de ProyectilesДокумент7 страницInforme Lanzamiento de ProyectilesCamilo TorresОценок пока нет
- Practica 2 CVECTДокумент9 страницPractica 2 CVECTGUADALUPE SÁNCHEZ VÁZQUEZОценок пока нет
- Funciones vectorialesДокумент9 страницFunciones vectorialesDemianHesseОценок пока нет
- Calculo Vectorial InformeДокумент11 страницCalculo Vectorial InformeRichard PilaОценок пока нет
- Practica No 7Документ3 страницыPractica No 7Ana QuirogaОценок пока нет
- Curvas: Cos (T) y Sen (T) Son Las Coordenadas Del Punto en El CirculoДокумент7 страницCurvas: Cos (T) y Sen (T) Son Las Coordenadas Del Punto en El CirculoMarco OlveraОценок пока нет
- Graficas de AplicacionДокумент10 страницGraficas de AplicacionAlex OsrОценок пока нет
- Cinemática: variables, sistemas de coordenadas y ecuacionesДокумент31 страницаCinemática: variables, sistemas de coordenadas y ecuacionesM Emilia CraveroОценок пока нет
- Taller de Movimiento RectilinioДокумент3 страницыTaller de Movimiento RectilinioLuis InaganОценок пока нет
- PC 02 PDFДокумент1 страницаPC 02 PDFDinacepreОценок пока нет
- Análisis de ecuaciones paramétricas y funciones vectorialesДокумент3 страницыAnálisis de ecuaciones paramétricas y funciones vectorialesEdu D. Bocanegra LopezОценок пока нет
- Parametrizacion de CurvasДокумент5 страницParametrizacion de CurvasvivagrОценок пока нет
- Taller 2 2018 - VeranoДокумент5 страницTaller 2 2018 - VeranoOSCO NEYRA LEIBNIZОценок пока нет
- Curvas: Derivadas, Tangentes y LongitudДокумент8 страницCurvas: Derivadas, Tangentes y LongitudKatherine Quispe AguilarОценок пока нет
- JulioCesar HernandezLopez Aprendizaje Basado en ProyectosДокумент12 страницJulioCesar HernandezLopez Aprendizaje Basado en ProyectosAlex OsrОценок пока нет
- Cinem Ej 8 de La Guia Resuelto PDFДокумент8 страницCinem Ej 8 de La Guia Resuelto PDFNerina ZaidelОценок пока нет
- Problema 13 Din Sergio Rossi - PPSXДокумент5 страницProblema 13 Din Sergio Rossi - PPSXNerina ZaidelОценок пока нет
- TP MG UBA Q1Документ10 страницTP MG UBA Q1Nerina ZaidelОценок пока нет
- PR 4 Parte 1 ResueltaДокумент48 страницPR 4 Parte 1 ResueltaNerina ZaidelОценок пока нет
- Programa AnaliticoДокумент4 страницыPrograma AnaliticoNerina ZaidelОценок пока нет
- Fisica Nuevo Exani IiДокумент23 страницыFisica Nuevo Exani IiAlberto SanchezОценок пока нет
- Notación científica y vectoresДокумент5 страницNotación científica y vectoresAlbi GonzalezОценок пока нет
- Ejercicios Unidad 2 FísicaДокумент12 страницEjercicios Unidad 2 FísicaIngrid AyalaОценок пока нет
- (N) Producto Vectorial y Producto EscalarДокумент3 страницы(N) Producto Vectorial y Producto EscalarErwin Chavez FloresОценок пока нет
- Conceptos Básicos Acerca Del Espín, Helicidad, Quiralidad y Polarización de Una Partícula de Dirac.Документ10 страницConceptos Básicos Acerca Del Espín, Helicidad, Quiralidad y Polarización de Una Partícula de Dirac.saunОценок пока нет
- Algebra para Ingenieria ExplicadoДокумент6 страницAlgebra para Ingenieria ExplicadodayvicitoОценок пока нет
- Movimiento rectilíneo: ecuaciones y cálculosДокумент5 страницMovimiento rectilíneo: ecuaciones y cálculosALEXANDRA LORENA MANTILLA HUARIPATAОценок пока нет
- Vectores en R2 y R3Документ14 страницVectores en R2 y R3No te creas todo lo que te dicenОценок пока нет
- Producto escalar y vectorial: problemas resueltosДокумент9 страницProducto escalar y vectorial: problemas resueltosBraham Gonzales ZuloetaОценок пока нет
- GUIA 3-Propiedades y Magnitudes Físicas (Parte 2)Документ5 страницGUIA 3-Propiedades y Magnitudes Físicas (Parte 2)July CamposОценок пока нет
- Taller 1 PDFДокумент3 страницыTaller 1 PDFLuis Miguel Molina GaleanoОценок пока нет
- Introducción Al Análisis Matemático Minas Visado - HuamachucoДокумент7 страницIntroducción Al Análisis Matemático Minas Visado - HuamachucoJosé Aranda LedesmaОценок пока нет
- Taller Sobre Vectores 2011-01 C.N. Versiom PDFДокумент2 страницыTaller Sobre Vectores 2011-01 C.N. Versiom PDFGilbert Guerra RojanoОценок пока нет
- .archivetempGUIA MAAP FISICA GENERAL-FISICA I 2016 PDFДокумент59 страниц.archivetempGUIA MAAP FISICA GENERAL-FISICA I 2016 PDFRicardo JustinianoОценок пока нет
- Geometría R3 vectoresДокумент5 страницGeometría R3 vectoresMartiniellert LetradivilОценок пока нет
- Silabo - 2020 - Alg Vectorial L MДокумент5 страницSilabo - 2020 - Alg Vectorial L MDarwinОценок пока нет
- Cálculo Infinitesimal de Funciones de Varias VariablesДокумент8 страницCálculo Infinitesimal de Funciones de Varias VariablesOlinto LopezОценок пока нет
- Trabajo Linea 150KV TERMINADO (Corregido)Документ68 страницTrabajo Linea 150KV TERMINADO (Corregido)Clauu DureОценок пока нет
- Apuntes Fisica 1 2017Документ50 страницApuntes Fisica 1 2017vicente jimenezОценок пока нет
- Producto VectorialДокумент6 страницProducto Vectorialdannico777Оценок пока нет
- 04 Numero S Comple JosДокумент16 страниц04 Numero S Comple JosjoseОценок пока нет
- Guiaestudio Grumetes Arma MecanicaДокумент6 страницGuiaestudio Grumetes Arma MecanicaAndreaMejiaОценок пока нет
- RESUMEN VECTORES y CaracteristicasДокумент5 страницRESUMEN VECTORES y CaracteristicasNormand SanchezОценок пока нет
- Mesa Fuerzas Fisica Mecanica 1.en - EsДокумент12 страницMesa Fuerzas Fisica Mecanica 1.en - EsDaniela GarcíaОценок пока нет
- Transformacion LinealДокумент12 страницTransformacion LinealAris RamirezОценок пока нет
- Dinamica - Jaime Molina PerezДокумент405 страницDinamica - Jaime Molina PerezYhosman CuentasОценок пока нет
- Practica4 J 2023 1Документ1 страницаPractica4 J 2023 1Bryam LavadoОценок пока нет
- 30 Preguntas de FisicaДокумент6 страниц30 Preguntas de FisicaFSAVERIOZОценок пока нет
- Analisis Vectorial Plan 2009Документ10 страницAnalisis Vectorial Plan 2009Marsha CampbellОценок пока нет
- 1-Manual de Autocad 2D - Ver2014-Basico PDFДокумент51 страница1-Manual de Autocad 2D - Ver2014-Basico PDFBorys YalleОценок пока нет