Вам также может понравиться
- Robust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationОт EverandRobust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationОценок пока нет
- ( ) C) Laplace Inverse of ( (SI-A) : USN Dayananda Sagar College of EngineeringДокумент2 страницы( ) C) Laplace Inverse of ( (SI-A) : USN Dayananda Sagar College of Engineeringkrushnasamy subramaniyanОценок пока нет
- The LNM Institute of Information Technology Ece and Cce ECE 321: Control System Engineering (End-Term Examination)Документ17 страницThe LNM Institute of Information Technology Ece and Cce ECE 321: Control System Engineering (End-Term Examination)Kunal ChamoliОценок пока нет
- Me71 Model QP 2022Документ3 страницыMe71 Model QP 2022Pramod RajОценок пока нет
- (An Autonomous Institute Affiliated To Vtu, Belagavi) : Shavigemalleshwara Hills, Kumaraswamy Layout, Bengaluru-560078Документ3 страницы(An Autonomous Institute Affiliated To Vtu, Belagavi) : Shavigemalleshwara Hills, Kumaraswamy Layout, Bengaluru-560078Krushnasamy SuramaniyanОценок пока нет
- 2022-Dec EC-411 100Документ1 страница2022-Dec EC-411 100Durgesh AnandОценок пока нет
- Digital Control Systems May 2007 Question PaperДокумент8 страницDigital Control Systems May 2007 Question Paperelimelek100% (3)
- 22 23Документ2 страницы22 23Goura Sundar TripathyОценок пока нет
- Gujarat Technological UniversityДокумент3 страницыGujarat Technological Universityfeyayel988Оценок пока нет
- Cs Winter 21 GtuДокумент3 страницыCs Winter 21 GtuSandeep kumarОценок пока нет
- RNS Institute of Technology, Bengaluru: (AICTE Approved, VTU Affiliated, NAAC A' Grade Accredited)Документ4 страницыRNS Institute of Technology, Bengaluru: (AICTE Approved, VTU Affiliated, NAAC A' Grade Accredited)Rakesh RОценок пока нет
- Question Paper Code:: (10×2 20 Marks)Документ4 страницыQuestion Paper Code:: (10×2 20 Marks)MohamedОценок пока нет
- Cie2 Acs 21 22Документ3 страницыCie2 Acs 21 22krushnasamy subramaniyanОценок пока нет
- Gujarat Technological UniversityДокумент2 страницыGujarat Technological UniversityNallaОценок пока нет
- CSS 22531-2023-Summer-Question-Paper EGДокумент4 страницыCSS 22531-2023-Summer-Question-Paper EGrushikarande0024Оценок пока нет
- WWW - Manaresults.Co - In: (Electrical and Electronics Engineering)Документ3 страницыWWW - Manaresults.Co - In: (Electrical and Electronics Engineering)mushahedОценок пока нет
- Gujarat Technological University: Subject Code:2141004 Subject Name:Control System Engineering Time:10:30 AM To 01:00 PMДокумент3 страницыGujarat Technological University: Subject Code:2141004 Subject Name:Control System Engineering Time:10:30 AM To 01:00 PMvisupinuОценок пока нет
- USN Dayananda Sagar College of Engineering: (An Autonomous Institute Affiliated To VTU, Belagavi)Документ3 страницыUSN Dayananda Sagar College of Engineering: (An Autonomous Institute Affiliated To VTU, Belagavi)Krushnasamy SuramaniyanОценок пока нет
- 3 Hours / 70 Marks: Seat NoДокумент4 страницы3 Hours / 70 Marks: Seat Nopranavsonwane500Оценок пока нет
- Question Paper Code:: Reg. No.Документ3 страницыQuestion Paper Code:: Reg. No.HOD ECE KNCETОценок пока нет
- MAKEUPДокумент3 страницыMAKEUPsaikar.challaОценок пока нет
- 09-Digital Control SystemsДокумент2 страницы09-Digital Control SystemsPradyumna PooskuruОценок пока нет
- BDA 30703 Sem 1 1213 PDFДокумент7 страницBDA 30703 Sem 1 1213 PDFJevine LaiОценок пока нет
- Control System1Документ11 страницControl System1cyprian obotaОценок пока нет
- Gujarat Technological UniversityДокумент2 страницыGujarat Technological Universityfeyayel988Оценок пока нет
- Control SystemДокумент4 страницыControl Systemsumanta.kundu318020Оценок пока нет
- Advanced Control Theory (Eee)Документ3 страницыAdvanced Control Theory (Eee)Adarsh VkОценок пока нет
- FE - Sample 2 (With Answers)Документ12 страницFE - Sample 2 (With Answers)tghafiyzafryОценок пока нет
- 141312-141701-Control - Winter - 2013 CT PDFДокумент2 страницы141312-141701-Control - Winter - 2013 CT PDFvisupinuОценок пока нет
- USN Dayananda Sagar College of Engineering Department of Electronics & Instrumentation Engineering Continuous Internal Evaluation - IiiДокумент2 страницыUSN Dayananda Sagar College of Engineering Department of Electronics & Instrumentation Engineering Continuous Internal Evaluation - Iiikrushnasamy subramaniyanОценок пока нет
- Gujarat Technological UniversityДокумент2 страницыGujarat Technological UniversityNallaОценок пока нет
- Code No: 35051Документ8 страницCode No: 35051SRINIVASA RAO GANTAОценок пока нет
- 2019 Dec. EE303-F - Ktu QbankДокумент3 страницы2019 Dec. EE303-F - Ktu QbankharithaОценок пока нет
- Control Systems r16 Nov 2019Документ2 страницыControl Systems r16 Nov 2019Department of Electronics and Communication Engineering AKNUОценок пока нет
- r05220205 Control SystemsДокумент9 страницr05220205 Control SystemsandhracollegesОценок пока нет
- 09-Digital Control SystemsДокумент2 страницы09-Digital Control Systemssudhakar kОценок пока нет
- Answer Any Two Full Questions, Each Carries 15 MarksДокумент3 страницыAnswer Any Two Full Questions, Each Carries 15 MarkskayyurОценок пока нет
- BMS College of Engineering, Bangalore-560019: May 2016 Semester End Main ExaminationsДокумент3 страницыBMS College of Engineering, Bangalore-560019: May 2016 Semester End Main Examinationskoushik bhatОценок пока нет
- Control System Question PaperДокумент2 страницыControl System Question PaperKishor GooddayОценок пока нет
- CS Dec 18Документ3 страницыCS Dec 18SAURABH BHISEОценок пока нет
- Control Systems Question Paper 2021 Calcutta University BTech EEДокумент3 страницыControl Systems Question Paper 2021 Calcutta University BTech EEAkash RoyОценок пока нет
- 2020-09-18SupplementaryEC409EC409-E - Ktu QbankДокумент3 страницы2020-09-18SupplementaryEC409EC409-E - Ktu QbankArjun S KumarОценок пока нет
- Oct-2o17 QPДокумент2 страницыOct-2o17 QPSai Pavan Kumar NandigamОценок пока нет
- DSP4Документ3 страницыDSP420001015503 MANAWWAR HUSSAINОценок пока нет
- Svcet Svcet: B. E./B.Tech. Degree Examination, Apriiimay 2005Документ4 страницыSvcet Svcet: B. E./B.Tech. Degree Examination, Apriiimay 2005lllllllllllОценок пока нет
- rr420201 Digital Control SystemsДокумент8 страницrr420201 Digital Control SystemsSrinivasa Rao GОценок пока нет
- Set No. 1: Digital Control Systems RT42021Документ8 страницSet No. 1: Digital Control Systems RT42021Akhil ChinnaОценок пока нет
- CS3CO29-EC-EI3CO07-IT3CO09-OE00005 Digital ElectronicsДокумент3 страницыCS3CO29-EC-EI3CO07-IT3CO09-OE00005 Digital Electronicschouhanraman822Оценок пока нет
- Answer Any Two Full Questions, Each Carries 15 MarksДокумент3 страницыAnswer Any Two Full Questions, Each Carries 15 MarksOlОценок пока нет
- Control SystemsДокумент8 страницControl SystemsprakashjntuОценок пока нет
- R7411008-Digital Control SystemsДокумент4 страницыR7411008-Digital Control SystemssivabharathamurthyОценок пока нет
- Gujarat Technological UniversityДокумент2 страницыGujarat Technological UniversityNallaОценок пока нет
- Department of Electronics and Instrumentation Internal Assessment Test - IДокумент2 страницыDepartment of Electronics and Instrumentation Internal Assessment Test - Ikrushnasamy subramaniyanОценок пока нет
- RR420201-DIGITAL-CONTROL-SYSTEMS June2007Документ8 страницRR420201-DIGITAL-CONTROL-SYSTEMS June2007singnamonivinaykumarОценок пока нет
- Dec. EC409-C - Ktu QbankДокумент3 страницыDec. EC409-C - Ktu QbankNISHANT KUMARОценок пока нет
- Mech3418 Ca 2016Документ4 страницыMech3418 Ca 2016Barry PoonОценок пока нет
- Jntua University Previous Question Papers: Dept., of E.C.E, RCEWДокумент25 страницJntua University Previous Question Papers: Dept., of E.C.E, RCEWpala abishayОценок пока нет
- BMS College of Engineering, Bangalore-560019: June 2016 Semester End Make Up ExaminationsДокумент3 страницыBMS College of Engineering, Bangalore-560019: June 2016 Semester End Make Up Examinationskoushik bhatОценок пока нет
- 2021 - Syllabus III-VIII - LICДокумент177 страниц2021 - Syllabus III-VIII - LICkrushnasamy subramaniyanОценок пока нет
- 19EI5DCLCS - Lect 2 - Tutorial - TF of Electrical NetworksДокумент17 страниц19EI5DCLCS - Lect 2 - Tutorial - TF of Electrical Networkskrushnasamy subramaniyanОценок пока нет
- Minor Regulations 2021Документ11 страницMinor Regulations 2021krushnasamy subramaniyanОценок пока нет
- AAT-CONTROL31to40 SS 22-23Документ4 страницыAAT-CONTROL31to40 SS 22-23krushnasamy subramaniyanОценок пока нет
- AAT CONTROL21to30 22 23Документ3 страницыAAT CONTROL21to30 22 23krushnasamy subramaniyanОценок пока нет
- BCS6L3-Programming in Java LabДокумент27 страницBCS6L3-Programming in Java Labkrushnasamy subramaniyanОценок пока нет
- 19EI5DCLCS - Lect 1-Introduction To Control SystemДокумент86 страниц19EI5DCLCS - Lect 1-Introduction To Control Systemkrushnasamy subramaniyanОценок пока нет
- AAT CONTROL31to40 22 23Документ2 страницыAAT CONTROL31to40 22 23krushnasamy subramaniyanОценок пока нет
- 19EI5DCLCS - Lec 3 - TF of Mechanical SystemsДокумент66 страниц19EI5DCLCS - Lec 3 - TF of Mechanical Systemskrushnasamy subramaniyanОценок пока нет
- AAT CONTROL - SS - 21to30 22 23Документ6 страницAAT CONTROL - SS - 21to30 22 23krushnasamy subramaniyanОценок пока нет
- AAT SS CONTROL11to20-22-23Документ5 страницAAT SS CONTROL11to20-22-23krushnasamy subramaniyanОценок пока нет
- AAT CONTROL1to10 22 23Документ2 страницыAAT CONTROL1to10 22 23krushnasamy subramaniyanОценок пока нет
- AAT CONTROL11to20 22 23Документ2 страницыAAT CONTROL11to20 22 23krushnasamy subramaniyanОценок пока нет
- AAT-CONTROL41to46 SS 22-23Документ3 страницыAAT-CONTROL41to46 SS 22-23krushnasamy subramaniyanОценок пока нет
- Dayananda Sagar College of Engineering: Department of Electronics & Instrumentation Engineering (Accredited by NBA)Документ5 страницDayananda Sagar College of Engineering: Department of Electronics & Instrumentation Engineering (Accredited by NBA)krushnasamy subramaniyanОценок пока нет
- Cie2 Acs 21 22Документ3 страницыCie2 Acs 21 22krushnasamy subramaniyanОценок пока нет
- AAT SS CONTROL1to10-22-23Документ8 страницAAT SS CONTROL1to10-22-23krushnasamy subramaniyanОценок пока нет
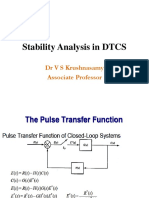
- Stability Analysis in DTCS: DR V S Krushnasamy Associate ProfessorДокумент56 страницStability Analysis in DTCS: DR V S Krushnasamy Associate Professorkrushnasamy subramaniyanОценок пока нет
- USN Dayananda Sagar College of Engineering Department of Electronics & Instrumentation Engineering Continuous Internal Evaluation - IiiДокумент2 страницыUSN Dayananda Sagar College of Engineering Department of Electronics & Instrumentation Engineering Continuous Internal Evaluation - Iiikrushnasamy subramaniyanОценок пока нет
- Department of Electronics and Instrumentation Internal Assessment Test - IДокумент2 страницыDepartment of Electronics and Instrumentation Internal Assessment Test - Ikrushnasamy subramaniyanОценок пока нет
- Week MaterialДокумент15 страницWeek Materialkrushnasamy subramaniyanОценок пока нет
- Safety Instrumentation Module - 5 Operation, Maintenance, Testing, Reporting and Management of PSMPДокумент104 страницыSafety Instrumentation Module - 5 Operation, Maintenance, Testing, Reporting and Management of PSMPkrushnasamy subramaniyan100% (1)
- Department of Electronics & Instrumentation Engineering Internal Assessment Test - IДокумент2 страницыDepartment of Electronics & Instrumentation Engineering Internal Assessment Test - Ikrushnasamy subramaniyanОценок пока нет
- An Autonomous Institute Affiliated To VTU, BelagaviДокумент1 страницаAn Autonomous Institute Affiliated To VTU, Belagavikrushnasamy subramaniyanОценок пока нет
- Control System and Simulation Lab (Eil77) For Vii Semester B.E Labaratory ManualДокумент18 страницControl System and Simulation Lab (Eil77) For Vii Semester B.E Labaratory Manualkrushnasamy subramaniyanОценок пока нет
- Answer Key INT2Документ10 страницAnswer Key INT2krushnasamy subramaniyanОценок пока нет
- USN Dayananda Sagar College of Engineering: Hot Wire AnemometerДокумент2 страницыUSN Dayananda Sagar College of Engineering: Hot Wire Anemometerkrushnasamy subramaniyanОценок пока нет
- Department of Electronics and Instrumentation Internal Assessment Test - IIIДокумент2 страницыDepartment of Electronics and Instrumentation Internal Assessment Test - IIIkrushnasamy subramaniyanОценок пока нет
- Stability Analysis in DTCS: DR V S Krushnasamy Associate ProfessorДокумент58 страницStability Analysis in DTCS: DR V S Krushnasamy Associate Professorkrushnasamy subramaniyanОценок пока нет
- MIKE21BW Step by Step GuideДокумент124 страницыMIKE21BW Step by Step Guideflpbravo100% (2)
- Proposal Form NagДокумент1 страницаProposal Form Nagnitheesh kumarОценок пока нет
- Methanol Technologies of Tkis: A Brief OverviewДокумент12 страницMethanol Technologies of Tkis: A Brief OverviewMuhammad NaeemОценок пока нет
- Safety Data Sheet 3D TRASAR® 3DT128: Section: 1. Product and Company IdentificationДокумент10 страницSafety Data Sheet 3D TRASAR® 3DT128: Section: 1. Product and Company IdentificationEscobar ValderramaОценок пока нет
- RestrictedДокумент51 страницаRestrictedsridharpalledaОценок пока нет
- Regulatory Framework For Water Dams in QuebecДокумент2 страницыRegulatory Framework For Water Dams in QuebecRaveeОценок пока нет
- Cad, CamДокумент16 страницCad, CamRakhi Mol BVОценок пока нет
- N Methylpyrrolidone: Chemical Synonym General InformationДокумент5 страницN Methylpyrrolidone: Chemical Synonym General InformationMohamed AdelОценок пока нет
- Dragons and Winged SerpentsДокумент5 страницDragons and Winged SerpentsYuna Raven100% (1)
- 120 BE5678 CenterДокумент2 страницы120 BE5678 CenterDipika GuptaОценок пока нет
- Chapter 4: Palm Oil and Oleochemical Industries.: Presented By: Lovelyna Eva Nur Aniqah Siti MaryamДокумент15 страницChapter 4: Palm Oil and Oleochemical Industries.: Presented By: Lovelyna Eva Nur Aniqah Siti MaryamdaabgchiОценок пока нет
- The Coffee Shop Easy Reading - 152542Документ1 страницаThe Coffee Shop Easy Reading - 152542Fc MakmurОценок пока нет
- (Studies in American Popular History and Culture) Gail Fowler Mohanty - Labor and Laborers of The Loom - Mechanization and Handloom Weavers, 1780-1840 - Routledge (2006)Документ292 страницы(Studies in American Popular History and Culture) Gail Fowler Mohanty - Labor and Laborers of The Loom - Mechanization and Handloom Weavers, 1780-1840 - Routledge (2006)Милош Станојловић100% (1)
- Emcoturn 365Документ362 страницыEmcoturn 365mikadoturkОценок пока нет
- Transportation ProblemДокумент4 страницыTransportation ProblemPrejit RadhakrishnaОценок пока нет
- Material Safety Data Sheet: KOMATSU Supercoolant AF-NAC (50/50 Pre-Diluted)Документ5 страницMaterial Safety Data Sheet: KOMATSU Supercoolant AF-NAC (50/50 Pre-Diluted)Thais Roberta CamposОценок пока нет
- Black Mamba Vs Mongoose Vs King Cobra Vs Komodo Vs PhythonДокумент44 страницыBlack Mamba Vs Mongoose Vs King Cobra Vs Komodo Vs PhythonmarcОценок пока нет
- Book 1Документ1 страницаBook 1PES SAFETYОценок пока нет
- How To Build A GreenhouseДокумент67 страницHow To Build A GreenhouseBolarinwaОценок пока нет
- DysphagiaДокумент4 страницыDysphagiaMicaОценок пока нет
- Time Series - Practical ExercisesДокумент9 страницTime Series - Practical ExercisesJobayer Islam TunanОценок пока нет
- Wind Load CompututationsДокумент31 страницаWind Load Compututationskim suarezОценок пока нет
- Anish Pandey ResumeДокумент4 страницыAnish Pandey ResumeAnubhav ChaturvediОценок пока нет
- CSA Pre-Test QuestionnaireДокумент16 страницCSA Pre-Test Questionnairedaniella balaquitОценок пока нет
- Consent For Diagnostic And/or Therapeutic ParacentesisДокумент2 страницыConsent For Diagnostic And/or Therapeutic ParacentesisnaveenОценок пока нет
- Yamaha rx-v395 v395rds htr-5130 5130rdsДокумент55 страницYamaha rx-v395 v395rds htr-5130 5130rdsdomino632776Оценок пока нет
- Alternatives To Shifting Cultivation-248Документ9 страницAlternatives To Shifting Cultivation-248Chandrashekhar KhobragadeОценок пока нет
- RA - Ducting WorksДокумент6 страницRA - Ducting WorksResearcherОценок пока нет
- CH Six Global Transportation Planning and ExecutionДокумент41 страницаCH Six Global Transportation Planning and ExecutionDsh ShОценок пока нет
- Final Project ReportДокумент83 страницыFinal Project ReportMohit SrivastavaОценок пока нет