Вам также может понравиться
- Natural Hazard Uncertainty Assessment: Modeling and Decision SupportОт EverandNatural Hazard Uncertainty Assessment: Modeling and Decision SupportKarin RileyОценок пока нет
- VisNIR Spectroscopic Measurement of Selected SoilДокумент17 страницVisNIR Spectroscopic Measurement of Selected SoilDarwin Mayorga CruzОценок пока нет
- 1 s2.0 S0016706105000728 Main PDFДокумент17 страниц1 s2.0 S0016706105000728 Main PDFjhon monteroОценок пока нет
- Geoderma: S. Hamed Javadi, Muhammad Abdul Munnaf, Abdul M. MouazenДокумент16 страницGeoderma: S. Hamed Javadi, Muhammad Abdul Munnaf, Abdul M. MouazenHuỳnh NgânОценок пока нет
- Soil Contamination With N - IRДокумент9 страницSoil Contamination With N - IRYathirajan GopalakrishnanОценок пока нет
- 1 s2.0 S0016706114003437 MainДокумент13 страниц1 s2.0 S0016706114003437 MainInés CastilloОценок пока нет
- Tang, 2019Документ11 страницTang, 2019Cristóbal GuerreroОценок пока нет
- Remote SensingДокумент13 страницRemote SensingTri HanantoОценок пока нет
- Fusing Environmental Variables Into Soil SpectroscДокумент8 страницFusing Environmental Variables Into Soil SpectroscSubhan Arif budimanОценок пока нет
- Remote SensingДокумент24 страницыRemote SensingBugheanu PaulaОценок пока нет
- NIR-Soil (Fresenius Env. Bull. 2003)Документ13 страницNIR-Soil (Fresenius Env. Bull. 2003)Antonio Deharo BailonОценок пока нет
- Remote Sensing: Linear Multi-Task Learning For Predicting Soil Properties Using Field SpectrosДокумент19 страницRemote Sensing: Linear Multi-Task Learning For Predicting Soil Properties Using Field Spectrosfabio3055Оценок пока нет
- 1 s2.0 S1470160X2200574X MainДокумент11 страниц1 s2.0 S1470160X2200574X MainCarlos AngaritaОценок пока нет
- 1 s2.0 S0034425722004722 MainДокумент14 страниц1 s2.0 S0034425722004722 MainAlysson CarvalhoОценок пока нет
- Role of Statistical Remote Sensing For Inland Water Quality Parameters PredictionДокумент8 страницRole of Statistical Remote Sensing For Inland Water Quality Parameters PredictionMagno JuniorОценок пока нет
- Tahmasbian Et Al., 2018Документ10 страницTahmasbian Et Al., 2018ciguerrero1Оценок пока нет
- Mapping Soil Salinity in Irrigated Land Using Optical Remote Sensing DataДокумент7 страницMapping Soil Salinity in Irrigated Land Using Optical Remote Sensing DataBIfeng HuОценок пока нет
- Machine Learning-Based Detection of Soil Salinity in An Arid Desert Region, Northwest China - A Comparison Between Landsat-8 OLI and Sentinel-2 MSIДокумент11 страницMachine Learning-Based Detection of Soil Salinity in An Arid Desert Region, Northwest China - A Comparison Between Landsat-8 OLI and Sentinel-2 MSIKarem SaadОценок пока нет
- Worldwide Continuous Gap-Filled MODISДокумент10 страницWorldwide Continuous Gap-Filled MODISGeoMathCenterОценок пока нет
- GoldschmithДокумент122 страницыGoldschmithSrinivasamoorthy krishnarajОценок пока нет
- Water Qual Hyperion 07Документ13 страницWater Qual Hyperion 07anon_157324138Оценок пока нет
- Discrimination Among Semi-Arid Landscape Endmembers Using The Spectral Angle Mapper (SAM) AlgorithmДокумент3 страницыDiscrimination Among Semi-Arid Landscape Endmembers Using The Spectral Angle Mapper (SAM) AlgorithmRandrei NevesОценок пока нет
- J Rse 2020 111740Документ15 страницJ Rse 2020 111740HarshitSinghОценок пока нет
- Neurocomputing: Nikolaos L. Tsakiridis, Christos G. Chadoulos, John B. Theocharis, Eyal Ben-Dor, George C. ZalidisДокумент15 страницNeurocomputing: Nikolaos L. Tsakiridis, Christos G. Chadoulos, John B. Theocharis, Eyal Ben-Dor, George C. Zalidis唐唐Оценок пока нет
- Investigating Land Surface Temperature CДокумент5 страницInvestigating Land Surface Temperature CkomailjanfakhriОценок пока нет
- Soriano-Disla, 2017Документ13 страницSoriano-Disla, 2017Cristóbal GuerreroОценок пока нет
- Bella - Sun, Wu, Tan - 2012 - The Relationship Between Land Surface Temperature and Land Useland Cover in Guangzhou, ChinaДокумент8 страницBella - Sun, Wu, Tan - 2012 - The Relationship Between Land Surface Temperature and Land Useland Cover in Guangzhou, Chinadata bbwsОценок пока нет
- Hyperspectral Laboratory DataДокумент4 страницыHyperspectral Laboratory DataRatnadeep DeshmukhОценок пока нет
- 150 GSJ7652Документ9 страниц150 GSJ7652sinchana G SОценок пока нет
- Prediction of Soil Organic Matter by VIS-NIR Spectroscopy Using Normalized Soil Moisture Index As A Proxy of Soil MoistureДокумент17 страницPrediction of Soil Organic Matter by VIS-NIR Spectroscopy Using Normalized Soil Moisture Index As A Proxy of Soil MoisturePiwadoОценок пока нет
- Monitoring Model of Land Cover Change For The Indication of Devegetation and Revegetation Using Sentinel-2Документ12 страницMonitoring Model of Land Cover Change For The Indication of Devegetation and Revegetation Using Sentinel-2sphinozalisnariaОценок пока нет
- Frequency, Electrical Conductivity and Temperature Analysis of A Low-Cost Capacitance Soil Moisture SensorДокумент12 страницFrequency, Electrical Conductivity and Temperature Analysis of A Low-Cost Capacitance Soil Moisture SensorandrewОценок пока нет
- 1 s2.0 S0341816222002740 MainДокумент15 страниц1 s2.0 S0341816222002740 MainLuciana PinhoОценок пока нет
- Alam 2018Документ6 страницAlam 2018Egas Jose Armando ArmandoОценок пока нет
- Ijg 2020103015151693Документ21 страницаIjg 2020103015151693Wi EmОценок пока нет
- Hyper SpectralДокумент8 страницHyper SpectralMohammad AlhadidОценок пока нет
- Spectrochimica Acta Part B: Atomic SpectrosДокумент7 страницSpectrochimica Acta Part B: Atomic SpectrosLuís Carlos Leva BorduchiОценок пока нет
- The Use of The Normalized Difference Water Index (NDWI) in The Delineation of Open Water FeaturesДокумент9 страницThe Use of The Normalized Difference Water Index (NDWI) in The Delineation of Open Water FeaturesYasmim MenezesОценок пока нет
- Sepúlveda Et Al., 2021Документ8 страницSepúlveda Et Al., 2021ciguerrero1Оценок пока нет
- Following The Cosmic-Ray-Neutron-Sensing-Based Soil Moisture Under Grassland and Forest: Exploring The Potential of Optical and SAR Remote SensingДокумент43 страницыFollowing The Cosmic-Ray-Neutron-Sensing-Based Soil Moisture Under Grassland and Forest: Exploring The Potential of Optical and SAR Remote SensingHOD PhysicsОценок пока нет
- Out PDFДокумент8 страницOut PDFShekhar TomarОценок пока нет
- Ibcast47879 2020 9044560Документ15 страницIbcast47879 2020 9044560Bagus Dwi CahyoОценок пока нет
- Algoritma Guzman Dan SantaellaДокумент9 страницAlgoritma Guzman Dan SantaellaRebekah JenkinsОценок пока нет
- Estimation of Leaf Area Index and Chlorophyll For A Mediterranean Grassland Using Hyperspectral DataДокумент8 страницEstimation of Leaf Area Index and Chlorophyll For A Mediterranean Grassland Using Hyperspectral DataalaanymohОценок пока нет
- A Method To Estimate Surface Soil Moisture and Map The - Sustainability-13-11355-V2Документ17 страницA Method To Estimate Surface Soil Moisture and Map The - Sustainability-13-11355-V2Muhammad Wiji Nur HudaОценок пока нет
- Atot-2008jtecha1100 1Документ9 страницAtot-2008jtecha1100 1Khalid AliОценок пока нет
- Comparison of GIS-based Interpolation Methods For Spatial Distribution of Soil Organic Carbon (SOC)Документ13 страницComparison of GIS-based Interpolation Methods For Spatial Distribution of Soil Organic Carbon (SOC)David Alejandro Reina LealОценок пока нет
- Pereira Et All 2019-Cal Val Chl-A SD S2-LimneticaДокумент17 страницPereira Et All 2019-Cal Val Chl-A SD S2-LimneticaPatricia UrregoОценок пока нет
- 2022 Article 982Документ22 страницы2022 Article 982Arega GenetieОценок пока нет
- Remotesensing 12 02303 v2Документ28 страницRemotesensing 12 02303 v2Luis HuaracaОценок пока нет
- Use of Color Parameters in The Grouping of Soil Samples Produces MoreДокумент15 страницUse of Color Parameters in The Grouping of Soil Samples Produces MoreDeivid Silva de SouzaОценок пока нет
- 1 s2.0 S0925400519311414 MainДокумент8 страниц1 s2.0 S0925400519311414 MainSorina CiopleaОценок пока нет
- Xu, Y. 2013 ReconstructionofthelandsurfacetemperaturetimeseriesДокумент7 страницXu, Y. 2013 ReconstructionofthelandsurfacetemperaturetimeseriesJuan Francisco Durango GrisalesОценок пока нет
- Arp1429 PDFДокумент10 страницArp1429 PDFmizzakeeОценок пока нет
- Bala Subramanian 2020Документ18 страницBala Subramanian 2020Tawakal TawakalОценок пока нет
- Predicting Topsoil Organic Carbon Using UAV-based Hyperspectral SensorДокумент2 страницыPredicting Topsoil Organic Carbon Using UAV-based Hyperspectral SensorEddisonjoseОценок пока нет
- Kusumiyati 2019 IOP Conf. Ser. Earth Environ. Sci. 393 012099Документ6 страницKusumiyati 2019 IOP Conf. Ser. Earth Environ. Sci. 393 012099Long NguyễnОценок пока нет
- Soil Spectroscopy: An Alternative To Wet Chemistry For Soil MonitoringДокумент21 страницаSoil Spectroscopy: An Alternative To Wet Chemistry For Soil MonitoringCristiano de Souza MarchesiОценок пока нет
- Carbon Nanomaterials for Bioimaging, Bioanalysis, and TherapyОт EverandCarbon Nanomaterials for Bioimaging, Bioanalysis, and TherapyYuen Y. HuiОценок пока нет
- Soil Organic Carbon and Particle Sizes M PDFДокумент11 страницSoil Organic Carbon and Particle Sizes M PDFkenaliОценок пока нет
- Face Recognition On The Edge - Reduce Cost, Complexity, and Power Consumption of Your DesignДокумент34 страницыFace Recognition On The Edge - Reduce Cost, Complexity, and Power Consumption of Your DesignkenaliОценок пока нет
- Face Recognition On The Edge - Reduce Cost, Complexity, and Power Consumption of Your DesignДокумент34 страницыFace Recognition On The Edge - Reduce Cost, Complexity, and Power Consumption of Your DesignkenaliОценок пока нет
- Non-Destructive Prediction of Sweetness of Intact Mango Using Near Infrared SpectrosДокумент5 страницNon-Destructive Prediction of Sweetness of Intact Mango Using Near Infrared SpectroskenaliОценок пока нет
- Rice Leaf Color Chart Using Low-Cost Visible Spectro Sensor - IJITEE - Volume-8 - Issue-7C2 - May - 2019Документ73 страницыRice Leaf Color Chart Using Low-Cost Visible Spectro Sensor - IJITEE - Volume-8 - Issue-7C2 - May - 2019kenaliОценок пока нет
- Resonant Photoacoustic Spectroscopy of NO2 With A UV-LED Based SensorДокумент10 страницResonant Photoacoustic Spectroscopy of NO2 With A UV-LED Based SensorkenaliОценок пока нет
- Resonant Photoacoustic Spectroscopy of NO2 With A UV-LED Based SensorДокумент10 страницResonant Photoacoustic Spectroscopy of NO2 With A UV-LED Based SensorkenaliОценок пока нет
- Design and Implementation of An IoT-Based Water Purifier System Enabling Predictive Maintenance-FICTA 2018 - LVQDanhДокумент21 страницаDesign and Implementation of An IoT-Based Water Purifier System Enabling Predictive Maintenance-FICTA 2018 - LVQDanhkenaliОценок пока нет
- Investigation Into The Use of A Low-Cost NIR Intergrated Circuit Spectrometer To Measure Chlorophyll Content Index-ICET 19 - LVQDanhДокумент8 страницInvestigation Into The Use of A Low-Cost NIR Intergrated Circuit Spectrometer To Measure Chlorophyll Content Index-ICET 19 - LVQDanhkenaliОценок пока нет
- Implementation of A Remote Telecommunications Laboratory Using Emona-DATEx Trainer at Cantho UniversityДокумент22 страницыImplementation of A Remote Telecommunications Laboratory Using Emona-DATEx Trainer at Cantho UniversitykenaliОценок пока нет
- Understanding Primary Battery TechnologiesДокумент33 страницыUnderstanding Primary Battery TechnologieskenaliОценок пока нет
- EM Simulators Improve With AgeДокумент3 страницыEM Simulators Improve With AgekenaliОценок пока нет
- Electrical Circuits SimulationДокумент58 страницElectrical Circuits SimulationNiranjan KumarОценок пока нет
- Choose The Right FFT Window Function When Evaluating Precision ADCsДокумент9 страницChoose The Right FFT Window Function When Evaluating Precision ADCskenaliОценок пока нет
- Name: - Score: - Student No. - Date: - Acitivity 11 (Kinetic Method)Документ4 страницыName: - Score: - Student No. - Date: - Acitivity 11 (Kinetic Method)pixiedustОценок пока нет
- Pauline Lowrie - AQA AS - A Level Year 1 Biology Student Guide - Topics 1 and 2 (2015)Документ97 страницPauline Lowrie - AQA AS - A Level Year 1 Biology Student Guide - Topics 1 and 2 (2015)Victor TrươngОценок пока нет
- ChemДокумент31 страницаChemslim_101Оценок пока нет
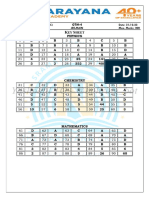
- Narayana GTM 4 Ans - Key 31-12-2024Документ16 страницNarayana GTM 4 Ans - Key 31-12-2024Gagan GОценок пока нет
- 15 LEACHING Extraction KEY ANS Master File1Документ10 страниц15 LEACHING Extraction KEY ANS Master File1macky 2Оценок пока нет
- Valence Electrons For ElementsДокумент31 страницаValence Electrons For ElementsVinluan, Kaye Andrei P.Оценок пока нет
- Problem:: Mass of Solute Mass of Solution X 100Документ3 страницыProblem:: Mass of Solute Mass of Solution X 100Joon Bok NamleeОценок пока нет
- Chemistry LOsДокумент44 страницыChemistry LOsYoussef samehОценок пока нет
- Soundspeed and Pipe Size DataДокумент27 страницSoundspeed and Pipe Size DataAnonymous nHT1rzjmcОценок пока нет
- Sodium Sulfide Assay USP36-NF31 - 03 - 1409Документ2 страницыSodium Sulfide Assay USP36-NF31 - 03 - 1409Yap Poh SiewОценок пока нет
- N248 SZ RT 006 Iso2 PDFДокумент151 страницаN248 SZ RT 006 Iso2 PDFAminОценок пока нет
- 3.7.1 - Joint Publications With LinkДокумент54 страницы3.7.1 - Joint Publications With LinkSaikishore RoyyalaОценок пока нет
- A3B2R4ABSДокумент234 страницыA3B2R4ABSPaco ArcaniОценок пока нет
- User Manual Autofilt2010 - Schmidt HaenschДокумент17 страницUser Manual Autofilt2010 - Schmidt HaenschEnang KholisОценок пока нет
- Component 1 MA 06 (MC)Документ6 страницComponent 1 MA 06 (MC)Zareen KidwaiОценок пока нет
- Introduction To Materials Science For Engineers Global Edition 9Th Edition James F Shackelford Full ChapterДокумент51 страницаIntroduction To Materials Science For Engineers Global Edition 9Th Edition James F Shackelford Full Chapterkathleen.overton284100% (5)
- PBMC Isolation ProtocolДокумент1 страницаPBMC Isolation ProtocolKartik BhamidipatiОценок пока нет
- Gizmo Digestive, Chemical Changes and Muscle and Bone Student GuideДокумент10 страницGizmo Digestive, Chemical Changes and Muscle and Bone Student GuideMacauley MilesОценок пока нет
- Method of Continuous Variations - Applications of Job Plots To The Study of Molecular Associations in Organometallic ChemistryДокумент17 страницMethod of Continuous Variations - Applications of Job Plots To The Study of Molecular Associations in Organometallic ChemistryYosimayrobi Endo NavarroОценок пока нет
- Chapter Six: Fundamentals of General, Organic, and Biological ChemistryДокумент83 страницыChapter Six: Fundamentals of General, Organic, and Biological ChemistryPARLIN SITORUSОценок пока нет
- Porra 1989Документ11 страницPorra 1989Abba SalisuОценок пока нет
- MSDS Anti Scalant LSPE 0114Документ1 страницаMSDS Anti Scalant LSPE 0114kilin arkalОценок пока нет
- Harvesting, Thickening and Dewatering Microalgae Biomass: November 2013Документ22 страницыHarvesting, Thickening and Dewatering Microalgae Biomass: November 2013Raymond Tabuelog MagdalanОценок пока нет
- Metals 10 01481 v2Документ15 страницMetals 10 01481 v2Nirmal GhoshОценок пока нет
- Practice Problems (Chapter 5) Stoichiometry - KEYДокумент3 страницыPractice Problems (Chapter 5) Stoichiometry - KEYGracia ProgellaОценок пока нет
- Introduction To Organic Chemistry (Assignment) - Nur Dania Binti Mohd Yusoff MS2117119795 B3t14Документ10 страницIntroduction To Organic Chemistry (Assignment) - Nur Dania Binti Mohd Yusoff MS2117119795 B3t14NUR DANIA MOHD YUSOFFОценок пока нет
- Nano-Phytosome A Developing Platform For Herbal Anti-Cancer Agents in Cancer TherapyДокумент12 страницNano-Phytosome A Developing Platform For Herbal Anti-Cancer Agents in Cancer TherapyFábio Teixeira da SilvaОценок пока нет
- Gas Laws Cheat Sheet 2012Документ1 страницаGas Laws Cheat Sheet 2012Judy Ann Binguan PahayacОценок пока нет
- LRB inДокумент9 страницLRB inRicky PriyatmokoОценок пока нет
- (Asce) MT 1943-5533 0003949Документ10 страниц(Asce) MT 1943-5533 0003949Ten FreireОценок пока нет