Вам также может понравиться
- FMA Modes A320Документ9 страницFMA Modes A320puneetkhokhar4504100% (2)
- Radio Navigation SummaryДокумент4 страницыRadio Navigation SummaryStefano Capovilla100% (1)
- Instruments 1 CrammerДокумент2 страницыInstruments 1 CrammerNicolas Cuvelier100% (1)
- Instruments 1 CrammerДокумент2 страницыInstruments 1 CrammerNicolas Cuvelier100% (1)
- Principles of FlightsДокумент91 страницаPrinciples of FlightsMoslem Grimaldi100% (2)
- Jeppessen (Instrument & Commercial) ManualДокумент25 страницJeppessen (Instrument & Commercial) ManualJunior Mebude SimbaОценок пока нет
- Basic Avionics PresentationДокумент148 страницBasic Avionics Presentationpontoo100% (14)
- GENERAL NAVIGATION - CompressedДокумент23 страницыGENERAL NAVIGATION - CompressedAlex Dominguez Miguez100% (1)
- Rules of Thumb in AviationДокумент4 страницыRules of Thumb in AviationDharavGosalia100% (2)
- Formulas for the E6-B Air Navigation Computer: Using the E6-B Simply & EfficientlyОт EverandFormulas for the E6-B Air Navigation Computer: Using the E6-B Simply & EfficientlyРейтинг: 4.5 из 5 звезд4.5/5 (4)
- Summay METДокумент5 страницSummay METNicolas CuvelierОценок пока нет
- Summay METДокумент5 страницSummay METNicolas CuvelierОценок пока нет
- EASA Human Performance PDFДокумент15 страницEASA Human Performance PDFMoslem GrimaldiОценок пока нет
- ATPL Notes - ElectricsДокумент23 страницыATPL Notes - ElectricsMoslem Grimaldi100% (3)
- ATPL Principles of Flight - QuestionsДокумент32 страницыATPL Principles of Flight - Questionsthe_gov100% (1)
- E Direction West: F Pressure Drop Wind Direction SouthДокумент1 страницаE Direction West: F Pressure Drop Wind Direction SouthNicolas CuvelierОценок пока нет
- System Design, Load, Stress & Maintenance: There Is No Most Favourable Design Method, As Each Component VariesДокумент22 страницыSystem Design, Load, Stress & Maintenance: There Is No Most Favourable Design Method, As Each Component VariesMoslem Grimaldi100% (1)
- DCS-P-51D Flight ManualДокумент183 страницыDCS-P-51D Flight ManualporkeaterОценок пока нет
- Mass and Balance - Keys NotesДокумент4 страницыMass and Balance - Keys NotesArnav KapoorОценок пока нет
- Principles of FlightДокумент6 страницPrinciples of FlightMoslem Grimaldi100% (1)
- LFMN IFR Charts PDFДокумент18 страницLFMN IFR Charts PDFNicolas Cuvelier100% (1)
- CPL Navigation PDFДокумент225 страницCPL Navigation PDFSrikanta Mishra100% (1)
- Radio Theory: Frequency or AmplitudeДокумент11 страницRadio Theory: Frequency or AmplitudeMoslem GrimaldiОценок пока нет
- Met RevisionДокумент50 страницMet RevisionVarun YadavОценок пока нет
- Gnav NotesДокумент15 страницGnav NotesNicolas Cuvelier100% (5)
- Gnav NotesДокумент15 страницGnav NotesNicolas Cuvelier100% (5)
- ATPL Notes - Rad NavДокумент27 страницATPL Notes - Rad NavMoslem Grimaldi100% (17)
- DNMMДокумент28 страницDNMMYusuf UsmanОценок пока нет
- Flight Planning and MonitoringДокумент12 страницFlight Planning and MonitoringWOJCIECHОценок пока нет
- Aircraft Performance - Keys NotesДокумент11 страницAircraft Performance - Keys NotesNicolas Cuvelier100% (8)
- Aircraft Performance - Keys NotesДокумент11 страницAircraft Performance - Keys NotesNicolas Cuvelier100% (8)
- General Navigation Revision NotesДокумент20 страницGeneral Navigation Revision NotesKartavya Patel100% (1)
- Air Law NumbersДокумент6 страницAir Law NumbersMoslem GrimaldiОценок пока нет
- Fuel ExercisesДокумент6 страницFuel ExercisesNicolas Cuvelier100% (1)
- Instruments Notes ATPLДокумент3 страницыInstruments Notes ATPLgonzalo gorositoОценок пока нет
- H8.Principles of FlightДокумент48 страницH8.Principles of FlightAF CSLОценок пока нет
- Atpl OralДокумент4 страницыAtpl OralAjay KoikalОценок пока нет
- Pof PDFДокумент18 страницPof PDFMoslem Grimaldi100% (2)
- Atpl Met Summary PDFДокумент28 страницAtpl Met Summary PDFAbhishek Dabas100% (2)
- Nav GenДокумент5 страницNav Genabi_5dec94100% (1)
- EASA Flight PlanningДокумент1 страницаEASA Flight PlanningPilot MrОценок пока нет
- 031-Mass and BalanceДокумент76 страниц031-Mass and BalanceNicolas CuvelierОценок пока нет
- 031-Mass and BalanceДокумент76 страниц031-Mass and BalanceNicolas CuvelierОценок пока нет
- Airbus A319-A321 (DLH) Training Manual, ATA 51-57 & 06-10 Structures Line & Base Maintenance Level 3 PDFДокумент245 страницAirbus A319-A321 (DLH) Training Manual, ATA 51-57 & 06-10 Structures Line & Base Maintenance Level 3 PDFRegis P100% (2)
- Garmin G1000 06-01-2011Документ109 страницGarmin G1000 06-01-2011Miguel Angel Palma100% (2)
- Met Atpl QДокумент6 страницMet Atpl QBharat Harmilapi100% (1)
- GNAV SofarДокумент23 страницыGNAV SofarNikola100% (1)
- Air Law - Keys Notes PDFДокумент23 страницыAir Law - Keys Notes PDFNicolas Cuvelier100% (8)
- Instruments Short NotesДокумент3 страницыInstruments Short NotesAshwin Samuel Philip100% (1)
- Meteorology AtplДокумент27 страницMeteorology Atpledward davisОценок пока нет
- Systems Atpl PDFДокумент111 страницSystems Atpl PDFMay Be100% (1)
- IFR Quick Review Guide V - 2020Документ21 страницаIFR Quick Review Guide V - 2020a1elg100% (1)
- ATPL Notes - EnginesДокумент52 страницыATPL Notes - EnginesMoslem Grimaldi100% (3)
- ATPLViva QuestionsДокумент27 страницATPLViva QuestionscaptravipooniaОценок пока нет
- Summay GNAVДокумент4 страницыSummay GNAVNicolas CuvelierОценок пока нет
- Summay GNAVДокумент4 страницыSummay GNAVNicolas CuvelierОценок пока нет
- Flight Planning - Keys NotesДокумент4 страницыFlight Planning - Keys NotesNicolas Cuvelier80% (5)
- ATPL Notes - Systems PDFДокумент37 страницATPL Notes - Systems PDFMoslem Grimaldi100% (1)
- Performance Numbers - VspeedsДокумент6 страницPerformance Numbers - VspeedsLuis TavaresОценок пока нет
- ATPL Notes - POF PDFДокумент48 страницATPL Notes - POF PDFMoslem Grimaldi100% (3)
- Human Performance - Keys NotesДокумент19 страницHuman Performance - Keys NotesNicolas Cuvelier100% (2)
- Human Performance Summary PDFДокумент8 страницHuman Performance Summary PDFMoslem Grimaldi100% (1)
- GSP Gen NavДокумент179 страницGSP Gen Navbhartisingh0812100% (1)
- 031-Mass and BalanceДокумент69 страниц031-Mass and BalanceNicolas CuvelierОценок пока нет
- Principles of FlightДокумент58 страницPrinciples of FlightQuentin Caselli100% (2)
- Chapter 22 Auto FlightДокумент50 страницChapter 22 Auto FlightJudhi C Ardyanto100% (2)
- 033 - Flight Planning: Air Distance TAS X GS Ground DistanceДокумент1 страница033 - Flight Planning: Air Distance TAS X GS Ground DistanceMoslem GrimaldiОценок пока нет
- DgcaДокумент50 страницDgcaasthОценок пока нет
- Atpl Viva QuestionsДокумент2 страницыAtpl Viva Questionsgigablade7425% (4)
- Ae8751 - Avionics: Unit I Introduction To AvionicsДокумент86 страницAe8751 - Avionics: Unit I Introduction To AvionicsKannan100% (1)
- QDB 15 Ifr & VFRДокумент14 страницQDB 15 Ifr & VFRKueh Chew Chai100% (4)
- ATPL Trainer Summary ALAWДокумент24 страницыATPL Trainer Summary ALAWMОценок пока нет
- Mass & Balance: Bem Measurements Frequency of MeasurementДокумент3 страницыMass & Balance: Bem Measurements Frequency of MeasurementMoslem Grimaldi100% (2)
- Gnav TheoryДокумент9 страницGnav TheoryMОценок пока нет
- General NavigationДокумент4 страницыGeneral NavigationMoslem GrimaldiОценок пока нет
- Basicaircraftstructure 110325070203 Phpapp02Документ36 страницBasicaircraftstructure 110325070203 Phpapp02Kv PavanОценок пока нет
- 021-1-Airframe & SystemsДокумент11 страниц021-1-Airframe & SystemsNicolas Cuvelier100% (1)
- 021-1-Airframe & SystemsДокумент11 страниц021-1-Airframe & SystemsNicolas Cuvelier100% (1)
- 021-1-Airframe & SystemsДокумент11 страниц021-1-Airframe & SystemsNicolas Cuvelier100% (1)
- Fuel Efficient Approach Configuration Sequence - VFR WeatherДокумент2 страницыFuel Efficient Approach Configuration Sequence - VFR WeatherbnolascoОценок пока нет
- 050 - 2019-10-18 CH 02 03 06 10 ExamДокумент20 страниц050 - 2019-10-18 CH 02 03 06 10 ExamNicolas CuvelierОценок пока нет
- Gulfstream G280 - Flying MagazineДокумент5 страницGulfstream G280 - Flying Magazinetom190465100% (2)
- Computer Location 90 N 80 VU PDFДокумент2 страницыComputer Location 90 N 80 VU PDFMayank Pathak100% (3)
- Instrumentation 1Документ8 страницInstrumentation 1jeisОценок пока нет
- Pièces Détachées Akra - F800GSДокумент1 страницаPièces Détachées Akra - F800GSNicolas CuvelierОценок пока нет
- 1.1. ATIS 1.2. Low Visibility Procedures (LVP) 11.. GgeenneerraallДокумент34 страницы1.1. ATIS 1.2. Low Visibility Procedures (LVP) 11.. Ggeenneerraallmehul da aviatorОценок пока нет
- The Chengdu Jian-20Документ20 страницThe Chengdu Jian-20Cat CrysisОценок пока нет
- Traffic Advisory SystemsДокумент4 страницыTraffic Advisory SystemsGustavo HofstatterОценок пока нет
- NIT Calicut SAE Aero Design ReportДокумент65 страницNIT Calicut SAE Aero Design ReportAbhishek ChauhanОценок пока нет
- U17AEI7203 Lecture 2Документ4 страницыU17AEI7203 Lecture 2SenthilKumarSОценок пока нет
- RNAV Feedback Austro SpainДокумент10 страницRNAV Feedback Austro SpainChristian AnayaОценок пока нет
- LMMLДокумент9 страницLMMLjacobo666Оценок пока нет
- SKBO ILS Rwy 13RДокумент1 страницаSKBO ILS Rwy 13RBobОценок пока нет
- Aircraft Design Project - IДокумент23 страницыAircraft Design Project - Irishitha reddyОценок пока нет
- Indicating & Recording QsДокумент2 страницыIndicating & Recording Qssachin jainОценок пока нет
- Pilot's Guide KTA 970Документ73 страницыPilot's Guide KTA 970Davidfigam100% (1)
- 4 AirfoilsДокумент19 страниц4 AirfoilsOscar AlmeidaОценок пока нет
- Da 423Документ8 страницDa 423Sherįl AlexxОценок пока нет
- طلعة الهند جيبسونДокумент153 страницыطلعة الهند جيبسونSokar SokoОценок пока нет
- By G T Selvan: Module 11B. Piston Aeroplane Aerodynamics, Structures and Systems Levell A2 B1.2Документ3 страницыBy G T Selvan: Module 11B. Piston Aeroplane Aerodynamics, Structures and Systems Levell A2 B1.2Sanooj N J KurupОценок пока нет
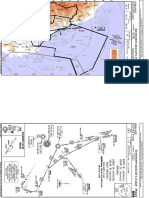
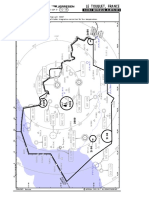
- Lfat/Ltq Le Touquet, France: .Radar - Minimum.AltitudesДокумент10 страницLfat/Ltq Le Touquet, France: .Radar - Minimum.AltitudesAurelien FLUTEAUXОценок пока нет
- SBSPSBBR PDF 1703716228Документ25 страницSBSPSBBR PDF 1703716228neveslucasbrdОценок пока нет