Вам также может понравиться
- Lipolisis y La Integrada Fisiologia de Metabolismo EnergeticoДокумент22 страницыLipolisis y La Integrada Fisiologia de Metabolismo EnergeticoOscar Leonardo Mosquera Dussan100% (1)
- Ley de Fick y AplicacionesДокумент16 страницLey de Fick y AplicacionesOscar Leonardo Mosquera DussanОценок пока нет
- Controlador Pid para Un Sistema Masa-Resorte Con FriccionДокумент6 страницControlador Pid para Un Sistema Masa-Resorte Con FriccionOscar Leonardo Mosquera DussanОценок пока нет
- Detector de Placas para Automoviles ParticularesДокумент10 страницDetector de Placas para Automoviles ParticularesOscar Leonardo Mosquera DussanОценок пока нет
- Informe 8 Laboratorio de Distribución de EnergíaДокумент5 страницInforme 8 Laboratorio de Distribución de EnergíaIan BaqueroОценок пока нет
- Ee-111 Analisis de Circuitos Electricos I PDFДокумент4 страницыEe-111 Analisis de Circuitos Electricos I PDFAngel NavarroОценок пока нет
- Cap85a TDДокумент31 страницаCap85a TDAmilcar MonteroОценок пока нет
- Propiedades Electricas, Magneticas y Termicas Ciencia e Ingenieria de Los MaterialesДокумент9 страницPropiedades Electricas, Magneticas y Termicas Ciencia e Ingenieria de Los MaterialesHector Ivan Miranda MontoyaОценок пока нет
- Manual de Prácticas de Electrónica Digital (Mantto Industrial)Документ10 страницManual de Prácticas de Electrónica Digital (Mantto Industrial)gabriel beltràn romànОценок пока нет
- Acondicionamiento de SeñalesДокумент5 страницAcondicionamiento de SeñalesKarlita MaciasОценок пока нет
- Amplificador de Audio Con Mezcladora y Eq 5 BandasДокумент20 страницAmplificador de Audio Con Mezcladora y Eq 5 BandasOscar Ivan Alvarado AguirreОценок пока нет
- 1-Pliego Tarifario 2009 A 2016 (Derogado)Документ8 страниц1-Pliego Tarifario 2009 A 2016 (Derogado)Denis LedezmaОценок пока нет
- COMPARACIONДокумент111 страницCOMPARACIONjose muenalaОценок пока нет
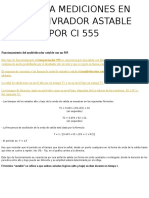
- Multivibrador Astable Con Un 555Документ7 страницMultivibrador Astable Con Un 555Meza Puchoc JeanОценок пока нет
- Actividad #05. - Circuitos Corriente ContinuaДокумент7 страницActividad #05. - Circuitos Corriente ContinuaMelany Geraldine PecheОценок пока нет
- Diferencia Entre Corriente Continua y AlternaДокумент2 страницыDiferencia Entre Corriente Continua y AlternaJoel Villca100% (1)
- Correcto Apagado y EncendidoДокумент4 страницыCorrecto Apagado y EncendidoagriponОценок пока нет
- SW1000 - SW2000 BA S 1811Документ55 страницSW1000 - SW2000 BA S 1811ERNC270% (1)
- Lab 6 ComunicacionesДокумент3 страницыLab 6 ComunicacionesJuan CastilloОценок пока нет
- SolTaller10 CAF2Документ12 страницSolTaller10 CAF2Rodrigo Robles MartinezОценок пока нет
- Unidad 04Документ33 страницыUnidad 04Anonymous px6Tz9KP100% (2)
- Informe Análisis Transitorio Mediante Transformada de Laplace Parte 2Документ6 страницInforme Análisis Transitorio Mediante Transformada de Laplace Parte 2Genoy DanielОценок пока нет
- Emborrador EmpastadoДокумент20 страницEmborrador EmpastadoFreddy Espejo0% (1)
- Componentes Eléctricos y Electrónicos BásicosДокумент4 страницыComponentes Eléctricos y Electrónicos BásicosArturo Hansel Garcia Tapia100% (1)
- Coeficiente Piezotérmico y Factor Piezoeléctrico. Fernanda ZarkinДокумент3 страницыCoeficiente Piezotérmico y Factor Piezoeléctrico. Fernanda ZarkinMarifer ZarkinОценок пока нет
- Ejercicios Resueltos y Propuestos: CapacitanciaДокумент5 страницEjercicios Resueltos y Propuestos: CapacitanciaJhonnathan Castillo64% (50)
- Guardado Con Autorrecuperación de UNIVERSIDAD TECNOLÓGICA DE CHILE INACAP TESISДокумент36 страницGuardado Con Autorrecuperación de UNIVERSIDAD TECNOLÓGICA DE CHILE INACAP TESISLeonardo Maliqueo0% (1)
- Baterias de LitioДокумент4 страницыBaterias de LitioLC JayОценок пока нет
- Tema 7 (Problemas)Документ4 страницыTema 7 (Problemas)imanОценок пока нет
- Tema2 Identificacion Espacios Redes LocalesДокумент18 страницTema2 Identificacion Espacios Redes Localesjesus2375Оценок пока нет
- Tema Sistemas Cableados y Los Sistemas ProgramadosДокумент14 страницTema Sistemas Cableados y Los Sistemas ProgramadosReynaldo Espino AltamiranoОценок пока нет
- LSTДокумент67 страницLSTRonaldTerrazasОценок пока нет
- Manual de Equipos de Aire Acondicionado Tipo CasseteДокумент50 страницManual de Equipos de Aire Acondicionado Tipo CasseteDANYBOYYY100% (1)
- Motores y GeneradoresДокумент10 страницMotores y GeneradoresRichar MoreloОценок пока нет