Вам также может понравиться
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesОт EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesРейтинг: 4.5 из 5 звезд4.5/5 (7)
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2От EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2Оценок пока нет
- TPC AC - DC Ground Detector Fault DetectorДокумент6 страницTPC AC - DC Ground Detector Fault DetectorIrfan Ari PОценок пока нет
- Introduction To Robotics Craig Solution ManualДокумент154 страницыIntroduction To Robotics Craig Solution ManualChoe Jungwoo100% (1)
- Disha Publication Electrical Concept Notes With Exercies Electrical MachinesДокумент64 страницыDisha Publication Electrical Concept Notes With Exercies Electrical MachinesRal Meena100% (1)
- Power TransformersДокумент90 страницPower TransformersMohammedSaadaniHassani100% (4)
- Transformer Tertiary Stabilizing Windings. Part I Apparent Power RatingДокумент7 страницTransformer Tertiary Stabilizing Windings. Part I Apparent Power RatingVictor Julián Fernández CarrazanaОценок пока нет
- Cinema Hall Design GuideДокумент52 страницыCinema Hall Design GuideMohan Daniel75% (8)
- Commercial Electrical Load Calculation Worksheet ExcelДокумент2 страницыCommercial Electrical Load Calculation Worksheet ExcelAshish Kamboj100% (1)
- Dry Transformer TrainingДокумент83 страницыDry Transformer TrainingHilde GoebelОценок пока нет
- Gerador Kipor Kde19 StaДокумент24 страницыGerador Kipor Kde19 Staantoniomecpt0% (1)
- Introduction To Electrical MachinesДокумент41 страницаIntroduction To Electrical Machinesthawatchai boonmunОценок пока нет
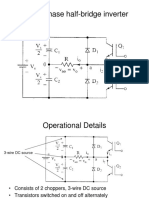
- Single Phase Half Bridge InverterДокумент29 страницSingle Phase Half Bridge InverterGnanaseharan Arunachalam100% (1)
- EE201 Tutorial-7 Transformer 23sep19 PDFДокумент61 страницаEE201 Tutorial-7 Transformer 23sep19 PDFSrikarОценок пока нет
- RBK-1 Details For Relay SettingДокумент3 страницыRBK-1 Details For Relay SettingWinny MathewОценок пока нет
- Simulink Power System Simulation ToolДокумент6 страницSimulink Power System Simulation ToolBill Cai100% (1)
- TransformersДокумент61 страницаTransformersibraheem pashaОценок пока нет
- Electro-Technique 2: TransformerДокумент57 страницElectro-Technique 2: TransformerAmmar Raman100% (1)
- ECE330 Fall 16 Lecture3 PDFДокумент10 страницECE330 Fall 16 Lecture3 PDFPhùng Đức AnhОценок пока нет
- Single-Phase Transformers: 6. Insulating DC Circuits From AC CircuitsДокумент21 страницаSingle-Phase Transformers: 6. Insulating DC Circuits From AC CircuitsLin ChongОценок пока нет
- EES Transformers Part 1 Feb 2015Документ44 страницыEES Transformers Part 1 Feb 2015filipekponyОценок пока нет
- EE 238 Power Engineering - IIДокумент23 страницыEE 238 Power Engineering - IISrishti SharmaОценок пока нет
- 17S2 EE3010 PPT Lecture10-TransformersДокумент27 страниц17S2 EE3010 PPT Lecture10-Transformersming yangОценок пока нет
- Equivalent Circuit of A Practical AutotransformerДокумент8 страницEquivalent Circuit of A Practical AutotransformerBT21EE017 Gulshan RajОценок пока нет
- Notes - TransformersДокумент7 страницNotes - TransformersGabrielle Mc LeanОценок пока нет
- Auto TransformerДокумент5 страницAuto TransformerAugy HaerudyОценок пока нет
- EE 740 Professor Ali Keyhani Lecture #3: Ideal TransformersДокумент11 страницEE 740 Professor Ali Keyhani Lecture #3: Ideal TransformersMohamed A. HusseinОценок пока нет
- Transformer ModelДокумент49 страницTransformer ModelKIMBERLY CAGUIAОценок пока нет
- Chapter1-2 - Single Phase TransformerДокумент53 страницыChapter1-2 - Single Phase TransformerswastikamohantyОценок пока нет
- Power SuppliesДокумент29 страницPower SuppliesMeral MeralОценок пока нет
- II. Transformers: TransformerДокумент22 страницыII. Transformers: TransformerEmircan AykarОценок пока нет
- S3B Ideal TransformersДокумент17 страницS3B Ideal TransformersRamenKing12Оценок пока нет
- Transformer On LoadДокумент14 страницTransformer On Loadrajatxavier4u100% (1)
- 01AUL SG 13 IdealTransformerДокумент7 страниц01AUL SG 13 IdealTransformerLuca CorОценок пока нет
- 17S2 EE3010 PPT Lecture9-TransformersДокумент21 страница17S2 EE3010 PPT Lecture9-Transformersming yangОценок пока нет
- Transformer BasicsДокумент25 страницTransformer BasicsPitambar MukherjeeОценок пока нет
- c2Документ52 страницыc2royclhorОценок пока нет
- Flyback SlidesДокумент9 страницFlyback SlidesdericksanthoseОценок пока нет
- Electrcal Machine Complete 20292009Документ178 страницElectrcal Machine Complete 20292009AdityaОценок пока нет
- EE330A: Power Systems: TransformersДокумент28 страницEE330A: Power Systems: TransformersGovind SharmaОценок пока нет
- Lesson 7 - Part 1Документ6 страницLesson 7 - Part 1Swifty SpotОценок пока нет
- Lecture PDFДокумент34 страницыLecture PDFAbd El-Rahman DabbishОценок пока нет
- MYДокумент64 страницыMYAjay KumarОценок пока нет
- 2.4 Cuk Converter ExampleДокумент20 страниц2.4 Cuk Converter ExampleNoben Kumar RoyОценок пока нет
- Answer of Test Paper of Advanced Power Electronics 2015 (Benny Yeung)Документ3 страницыAnswer of Test Paper of Advanced Power Electronics 2015 (Benny Yeung)taufiqishak09Оценок пока нет
- EE-101-S2 - W10 - 02: Vivek AgarwalДокумент32 страницыEE-101-S2 - W10 - 02: Vivek AgarwalDiptashree BanerjeeОценок пока нет
- DC Circuits: Fundamentals of Electric CircuitsДокумент39 страницDC Circuits: Fundamentals of Electric CircuitsHoàng HoàngAnhОценок пока нет
- ELEC3206 Lab 1 3-ph TransformerДокумент7 страницELEC3206 Lab 1 3-ph TransformermaxОценок пока нет
- Elektrikle Tahrik Transformat Örler: TransformersДокумент14 страницElektrikle Tahrik Transformat Örler: TransformersHasan ZehirОценок пока нет
- Lecture Transformer: Transformer and Its TheoryДокумент39 страницLecture Transformer: Transformer and Its TheoryDanialОценок пока нет
- Electrical Machines 1Документ14 страницElectrical Machines 1WolfОценок пока нет
- Power Electronics - EC3031Документ5 страницPower Electronics - EC3031sadeepa sooriyaarachchiОценок пока нет
- 4LectureIKC Magnetic CircuitsДокумент39 страниц4LectureIKC Magnetic Circuitsmelih bulutОценок пока нет
- Review of 1-AC Circuit FundamentalsДокумент52 страницыReview of 1-AC Circuit FundamentalsNZОценок пока нет
- Nodal Analysis Method: at Node 1Документ3 страницыNodal Analysis Method: at Node 1Karwan NaderОценок пока нет
- EIE324 2portДокумент30 страницEIE324 2portEmmanuel OkoroОценок пока нет
- Transform at or IДокумент20 страницTransform at or IMisoОценок пока нет
- ELL 100 Introduction To Electrical Engineering: Ecture RansformersДокумент65 страницELL 100 Introduction To Electrical Engineering: Ecture RansformersDagmawe ZewengelОценок пока нет
- CT DimensioningДокумент28 страницCT DimensioningTaskОценок пока нет
- Unit 2Документ36 страницUnit 2Anu GraphicsОценок пока нет
- Benefits of AC-motorДокумент12 страницBenefits of AC-motorPuneet JoshiОценок пока нет
- 1PH Half Bridge InverterДокумент31 страница1PH Half Bridge InvertertintuvrОценок пока нет
- Transformers (1) : ECE 330 Power Circuits and ElectromechanicsДокумент9 страницTransformers (1) : ECE 330 Power Circuits and ElectromechanicsYazid AbouchihabeddineОценок пока нет
- Chapter - 2.3 SwitchingMatrix - InverterДокумент30 страницChapter - 2.3 SwitchingMatrix - InverterdafОценок пока нет
- Isolated DC-DC Converters: Chapter TwoДокумент12 страницIsolated DC-DC Converters: Chapter TwoMarko SvalinaОценок пока нет
- Efficient Three-Phase Power-Flow Method For Unbalanced Radial Distribution SystemsДокумент6 страницEfficient Three-Phase Power-Flow Method For Unbalanced Radial Distribution SystemsVictor EnriquezОценок пока нет
- A Robotic Lift AssisterДокумент9 страницA Robotic Lift AssisterVictor EnriquezОценок пока нет
- Craig's Solutions To Selected Problems in Chapter 2Документ4 страницыCraig's Solutions To Selected Problems in Chapter 2Victor EnriquezОценок пока нет
- Various Custom Power Devices For Power Quality Improvement A ReviewДокумент8 страницVarious Custom Power Devices For Power Quality Improvement A ReviewEditor IJTSRDОценок пока нет
- Hitachi AsiaДокумент4 страницыHitachi AsiaWendi HaryadiОценок пока нет
- Installation and Operation Manual: SCF SeriesДокумент68 страницInstallation and Operation Manual: SCF SeriesMartín DíazОценок пока нет
- 9b0642de-f4a7-4c38-a2a1-d4feb18dab3cДокумент18 страниц9b0642de-f4a7-4c38-a2a1-d4feb18dab3cHải Nhỏ丁黄海Оценок пока нет
- Manual DM6000Документ52 страницыManual DM6000thiago silvaОценок пока нет
- The Electric System: - Generation - TransmissionДокумент18 страницThe Electric System: - Generation - TransmissionWilliamBradley PittОценок пока нет
- Tesla Motor BrochureДокумент56 страницTesla Motor BrochureGordonОценок пока нет
- Electrical Machines Lab ManualДокумент85 страницElectrical Machines Lab ManualClause IandОценок пока нет
- BMU Series-Brushless Motors-AC InputДокумент25 страницBMU Series-Brushless Motors-AC InputMauro H. S. WencelewskiОценок пока нет
- Lovato PM CatalogueДокумент10 страницLovato PM CatalogueMiFa PОценок пока нет
- Clean Power For You: 127/220vac and 60Hz, Three Phase SystemДокумент2 страницыClean Power For You: 127/220vac and 60Hz, Three Phase SystemBanjo MirandillaОценок пока нет
- Stamford Ucdi274kДокумент7 страницStamford Ucdi274kSilver SilverОценок пока нет
- DANFOSS - Soft Starters Linha MCD3000Документ20 страницDANFOSS - Soft Starters Linha MCD3000JardelОценок пока нет
- Experiment 05 em LabДокумент17 страницExperiment 05 em LabMuhammad Manzar Amin100% (1)
- Telecom Energy BrochureДокумент18 страницTelecom Energy BrochureahmedОценок пока нет
- Corona in SubstationДокумент5 страницCorona in SubstationSwechhya kafleОценок пока нет
- Feeder Protection and Control REF630: Product GuideДокумент84 страницыFeeder Protection and Control REF630: Product Guidecarloviggiano4_26961Оценок пока нет
- Manual PWK12600iДокумент65 страницManual PWK12600iorlando sepulvedaОценок пока нет
- Elements of Industrial Automation PortfolioДокумент50 страницElements of Industrial Automation PortfolioThanmay JSОценок пока нет
- Substation Testing and Commissioning Power Transformer Throught Fault TestДокумент6 страницSubstation Testing and Commissioning Power Transformer Throught Fault TestSabyasachi KarОценок пока нет
- Instruction and Service Manual Adjustable Frequency Crane ControlДокумент9 страницInstruction and Service Manual Adjustable Frequency Crane ControlJoss Maykol Mundaca VasquezОценок пока нет
- EE 158: Electrical System Design TDETWX Practice SetДокумент2 страницыEE 158: Electrical System Design TDETWX Practice SetEmman Joshua BustoОценок пока нет
- Phase Failure Relay: Specification FunctionДокумент1 страницаPhase Failure Relay: Specification Functionsandesh sawateОценок пока нет