Вам также может понравиться
- Semana 19 Lunes 10 de AgostoДокумент12 страницSemana 19 Lunes 10 de AgostoLUISA CAMAОценок пока нет
- Sensores y Actuadores en El Automovil PDFДокумент26 страницSensores y Actuadores en El Automovil PDFarturo_gilson100% (1)
- Administracion de Base de DatosДокумент10 страницAdministracion de Base de DatosJuan José Ochoa CadilloОценок пока нет
- FDE 108 Guía Didáctica de AMV (Subperiodo1) - ENX72-5Документ9 страницFDE 108 Guía Didáctica de AMV (Subperiodo1) - ENX72-5Leandra Castro HerreraОценок пока нет
- EVANGELIZACION KerigmaДокумент6 страницEVANGELIZACION KerigmapabloОценок пока нет
- São Claudio de Colombier - AbandonoДокумент16 страницSão Claudio de Colombier - AbandonoFernando BondanОценок пока нет
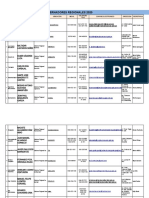
- Directorio Gobernadores Regionales 22 de Enero 2020Документ7 страницDirectorio Gobernadores Regionales 22 de Enero 2020LIZETОценок пока нет
- FRM Iperc Demolicion Crm7 RevcДокумент6 страницFRM Iperc Demolicion Crm7 RevcCR MarОценок пока нет
- Reporte Teleclase 2, Finanzaas 1Документ15 страницReporte Teleclase 2, Finanzaas 1César Yataco AОценок пока нет
- Programa EducativoДокумент47 страницPrograma EducativoNora Bueno SalcedoОценок пока нет
- Separadores Creativos para La Biblia - PDF - 20240316 - 183106 - 0000Документ9 страницSeparadores Creativos para La Biblia - PDF - 20240316 - 183106 - 0000jnoob864Оценок пока нет
- Crucigrama Del Rol de Tutor-Virtual y Del Estudiantes PDFДокумент4 страницыCrucigrama Del Rol de Tutor-Virtual y Del Estudiantes PDFGladis LopezОценок пока нет
- Vuelos Espaciales No TripuladosДокумент21 страницаVuelos Espaciales No TripuladosJuan ParmaОценок пока нет
- Tema VII Diagrama de FasesДокумент51 страницаTema VII Diagrama de FasesVictor SierraОценок пока нет
- Página 1 de 13Документ13 страницPágina 1 de 13Jacob Reyes BaqueОценок пока нет
- Colon y Anexos Digestivos APДокумент7 страницColon y Anexos Digestivos APHolstarОценок пока нет
- Exposicion QuarksДокумент19 страницExposicion QuarksBaltazarNicolasSieteSoles100% (1)
- Crisis de Atencion en La Salud Preventiva y CurativaДокумент3 страницыCrisis de Atencion en La Salud Preventiva y CurativaStefany Freitez100% (1)
- Escuela de Ajedrez Alaquas 15-16Документ2 страницыEscuela de Ajedrez Alaquas 15-16Club Ajedrez AlaquásОценок пока нет
- Fe Esperanza y CaridadДокумент2 страницыFe Esperanza y CaridadJ Francisco Aguilar LunaОценок пока нет
- Prueba 2Документ3 страницыPrueba 2NewSulyx 04Оценок пока нет
- Multiplicacion de in - Propiedades - PracticasДокумент3 страницыMultiplicacion de in - Propiedades - PracticasPamela SattelmaierОценок пока нет
- Guia de Elaboración de ProyectosДокумент11 страницGuia de Elaboración de ProyectosPiero Gamarra VenegasОценок пока нет
- Articulo Macnamara CefalometriaДокумент34 страницыArticulo Macnamara CefalometriaOscar GarciaОценок пока нет
- Libro - Vian - OconДокумент52 страницыLibro - Vian - OconUlises ValienteОценок пока нет
- Salamanca - Las Rocas de ConstruccionДокумент7 страницSalamanca - Las Rocas de ConstruccionaaragoОценок пока нет
- Examen Parcial I FQДокумент4 страницыExamen Parcial I FQKENYI ANDERSON DIAZ LEONОценок пока нет
- Terminologia de EsteticaДокумент3 страницыTerminologia de EsteticaGavilan FloresОценок пока нет
- Informe Carta de JamaicaДокумент6 страницInforme Carta de JamaicaJorge ParraОценок пока нет
- Catalogo de Vinos Octubre VFДокумент26 страницCatalogo de Vinos Octubre VFEduardo Miguel PuricelliОценок пока нет