Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Test Bank For Macroeconomics 8th Canadian Edition Andrew AbelДокумент16 страницTest Bank For Macroeconomics 8th Canadian Edition Andrew AbelstebinrothОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Restoring PH Balance in The BodyДокумент6 страницRestoring PH Balance in The Bodycinefil70Оценок пока нет
- UST Corporation Law Syllabus 2020 2021Документ26 страницUST Corporation Law Syllabus 2020 2021PAMELA ALEXIA CASTILLOОценок пока нет
- Psychological Well Being - 18 ItemsДокумент5 страницPsychological Well Being - 18 ItemsIqra LatifОценок пока нет
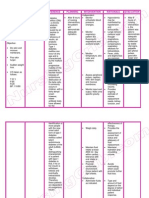
- Nursing Care Plan Diabetes Mellitus Type 1Документ2 страницыNursing Care Plan Diabetes Mellitus Type 1deric85% (46)
- PACiS Training Manual PDFДокумент104 страницыPACiS Training Manual PDFsherub wangdi100% (1)
- Watchdog TimerДокумент4 страницыWatchdog Timersherub wangdiОценок пока нет
- Type DG Mod 320 Part No. 952 013: Figure Without ObligationДокумент1 страницаType DG Mod 320 Part No. 952 013: Figure Without Obligationsherub wangdiОценок пока нет
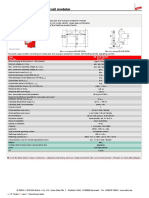
- Product Data Sheet: Dehnrail Modular DR M 2P 60 FM (953 207)Документ1 страницаProduct Data Sheet: Dehnrail Modular DR M 2P 60 FM (953 207)sherub wangdiОценок пока нет
- Mob Sj6md63 eДокумент58 страницMob Sj6md63 esherub wangdiОценок пока нет
- CSQ-3 - Check Synchronising Relay: SynchroscopesДокумент1 страницаCSQ-3 - Check Synchronising Relay: Synchroscopessherub wangdiОценок пока нет
- Product Data Sheet: Dehnguard® Modular DG M TNC 150 (952 313)Документ1 страницаProduct Data Sheet: Dehnguard® Modular DG M TNC 150 (952 313)sherub wangdiОценок пока нет
- Elite 440: Multi-Line Three-Phase Panel MeterДокумент4 страницыElite 440: Multi-Line Three-Phase Panel Metersherub wangdiОценок пока нет
- Enclosure Internal Thermostat - SK 3110.000: Date: Jun 22, 2014Документ4 страницыEnclosure Internal Thermostat - SK 3110.000: Date: Jun 22, 2014sherub wangdiОценок пока нет
- Door-Operated Switch - SZ 4127.010: Date: Aug 21, 2018Документ3 страницыDoor-Operated Switch - SZ 4127.010: Date: Aug 21, 2018sherub wangdiОценок пока нет
- Rittal Heater Without Fan 3105340Документ3 страницыRittal Heater Without Fan 3105340sherub wangdiОценок пока нет
- TeSys Control Relays - CA3KN405FDДокумент2 страницыTeSys Control Relays - CA3KN405FDsherub wangdiОценок пока нет
- ACP 1703 Ax 1703 CM-0843: Bus Interface Ax-PE 4x USBДокумент6 страницACP 1703 Ax 1703 CM-0843: Bus Interface Ax-PE 4x USBsherub wangdiОценок пока нет
- Door-Operated Switch - SZ 4127.210: Date: Aug 21, 2018Документ3 страницыDoor-Operated Switch - SZ 4127.210: Date: Aug 21, 2018sherub wangdiОценок пока нет
- Panel Thermostat: 7T.81.0.000.240x 7T.81.0.000.230xДокумент2 страницыPanel Thermostat: 7T.81.0.000.240x 7T.81.0.000.230xsherub wangdiОценок пока нет
- AC Ammeters, Voltmeters - DGL: Data SheetДокумент3 страницыAC Ammeters, Voltmeters - DGL: Data Sheetsherub wangdiОценок пока нет
- Technical Data of KTP 4000 Basic HMI SiemensДокумент5 страницTechnical Data of KTP 4000 Basic HMI Siemenssherub wangdiОценок пока нет
- Panel Meter XXXXXXXXXXXXX PDFДокумент12 страницPanel Meter XXXXXXXXXXXXX PDFsherub wangdiОценок пока нет
- Antistatic Device: Reach SymbolДокумент5 страницAntistatic Device: Reach Symbolsherub wangdiОценок пока нет
- TeSys Control Relays - CA3KN22FDДокумент3 страницыTeSys Control Relays - CA3KN22FDsherub wangdiОценок пока нет
- TeSys K - LA1KN40Документ2 страницыTeSys K - LA1KN40sherub wangdiОценок пока нет
- Feed-Through Terminal Block - UK 2,5 N RD - 0719074: Key Commercial DataДокумент22 страницыFeed-Through Terminal Block - UK 2,5 N RD - 0719074: Key Commercial Datasherub wangdiОценок пока нет
- 220VDC 2no2nc - Ca3kn22mdДокумент2 страницы220VDC 2no2nc - Ca3kn22mdsherub wangdiОценок пока нет
- Feed-Through Terminal Block - UK 2,5 N BK - 0719100: Key Commercial DataДокумент22 страницыFeed-Through Terminal Block - UK 2,5 N BK - 0719100: Key Commercial Datasherub wangdiОценок пока нет
- 7PG15 TR Relays Order CodeДокумент1 страница7PG15 TR Relays Order Codesherub wangdiОценок пока нет
- Neoclassical CounterrevolutionДокумент1 страницаNeoclassical CounterrevolutionGraziella ValerioОценок пока нет
- Final Report of BBSMДокумент37 страницFinal Report of BBSMraazoo1967% (9)
- PmtsДокумент46 страницPmtsDhiraj ZanzadОценок пока нет
- Science9 Q3 SLM1Документ15 страницScience9 Q3 SLM1Zandra Musni Delos ReyesОценок пока нет
- MC-8002 Mixer 2Документ1 страницаMC-8002 Mixer 2JAIDEV KUMAR RANIОценок пока нет
- Symbolic Interaction Theory: Nilgun Aksan, Buket Kısac, Mufit Aydın, Sumeyra DemirbukenДокумент3 страницыSymbolic Interaction Theory: Nilgun Aksan, Buket Kısac, Mufit Aydın, Sumeyra DemirbukenIgor Dutra BaptistaОценок пока нет
- ADP ObservationДокумент15 страницADP ObservationSanjay SОценок пока нет
- Paula Moraga (Author) - Geospatial Health Data-Modeling and Visualization With R-InLA and Shiny-Chapman and Hall - CRC (2019)Документ295 страницPaula Moraga (Author) - Geospatial Health Data-Modeling and Visualization With R-InLA and Shiny-Chapman and Hall - CRC (2019)M Khahfi ZuhandaОценок пока нет
- Learner Cala Guide: PART A: Identification of Knowledgeable Elderly Part BДокумент5 страницLearner Cala Guide: PART A: Identification of Knowledgeable Elderly Part BPrimrose MurapeОценок пока нет
- Apache Nifi Tutorial - What Is - Architecture - InstallationДокумент5 страницApache Nifi Tutorial - What Is - Architecture - InstallationMario SoaresОценок пока нет
- PostmanPat Activity PackДокумент5 страницPostmanPat Activity PackCorto Maltese100% (1)
- Resume Pet A Sol LanderДокумент3 страницыResume Pet A Sol LanderdreyesfinuliarОценок пока нет
- UBO - Lecture 07 - Implementing and Managing Organisational ChangeДокумент0 страницUBO - Lecture 07 - Implementing and Managing Organisational ChangeShahNooraniITОценок пока нет
- Tok EssayДокумент2 страницыTok EssayNeto UkpongОценок пока нет
- AQAR-Report 2018-19 Tilak VidyapeethДокумент120 страницAQAR-Report 2018-19 Tilak VidyapeethAcross BordersОценок пока нет
- Empowerment TechnologyДокумент2 страницыEmpowerment TechnologyRegina Mambaje Alferez100% (1)
- PWC - Digital Pocket Tax Book 2023 - SlovakiaДокумент52 страницыPWC - Digital Pocket Tax Book 2023 - SlovakiaRoman SlovinecОценок пока нет
- Negotiation Homework AssignmentДокумент3 страницыNegotiation Homework AssignmentEunice Lourenço TanganeОценок пока нет
- Sequence Analytical and Vector Geometry at Teaching of Solid Geometry at Secondary SchoolДокумент10 страницSequence Analytical and Vector Geometry at Teaching of Solid Geometry at Secondary SchoolJuan S. PalmaОценок пока нет
- Extension of MDRRMO OfficeДокумент12 страницExtension of MDRRMO OfficeJustin YuabОценок пока нет
- ĐÁP ÁN ĐỀ THI THỬ SỐ 03 (2019-2020)Документ8 страницĐÁP ÁN ĐỀ THI THỬ SỐ 03 (2019-2020)Đào VânОценок пока нет
- Ssi-199-22 D Vikran Dolphin Rev.1Документ2 страницыSsi-199-22 D Vikran Dolphin Rev.1ANGEL ANTONIO GUTIERREZ CONTRERASОценок пока нет
- Tia Portal V16 OrderlistДокумент7 страницTia Portal V16 OrderlistJahidul IslamОценок пока нет
- Ellis Lived ExperiencesДокумент31 страницаEllis Lived ExperiencesJeanny Mae PesebreОценок пока нет
- Unit 9 TelephoningДокумент14 страницUnit 9 TelephoningDaniela DanilovОценок пока нет