Вам также может понравиться
- Time Series SolutionДокумент5 страницTime Series Solutionbehrooz100% (1)
- ECEN 619: Internet Protocols & Modeling: Sridhar Mareguddi April 16, 2015 UIN: 823000772Документ7 страницECEN 619: Internet Protocols & Modeling: Sridhar Mareguddi April 16, 2015 UIN: 823000772Sanjiti BhargavaОценок пока нет
- HW1 SolutionДокумент6 страницHW1 SolutionAliBaranIşıkОценок пока нет
- General Welding Procedures (0679, 7000) (REHS1841-23)Документ73 страницыGeneral Welding Procedures (0679, 7000) (REHS1841-23)Anderson Oliveira SilvaОценок пока нет
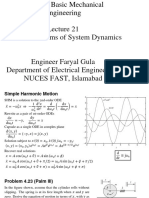
- Lecture 21Документ12 страницLecture 21I190845 Samana NayyabОценок пока нет
- Problem Sheet 2Документ2 страницыProblem Sheet 2Ashna JoseОценок пока нет
- Tutorial 2 Questions 2023Документ3 страницыTutorial 2 Questions 2023j2yshjzzsxОценок пока нет
- 3 - Control Strategies For Servo Drives - Rev 30-03-2021Документ10 страниц3 - Control Strategies For Servo Drives - Rev 30-03-2021Euge GalardiОценок пока нет
- Week6 CHAPTER 1: Convolution MAT485/565Документ4 страницыWeek6 CHAPTER 1: Convolution MAT485/565qistinaОценок пока нет
- Tutorial 4LDSДокумент3 страницыTutorial 4LDSshivendra.singh.vermaОценок пока нет
- Lab 5 - State Feedback ControlДокумент14 страницLab 5 - State Feedback ControlHạo NammОценок пока нет
- SignalsДокумент3 страницыSignalsBerentoОценок пока нет
- BEE-C413: B. Tech. Semester Iv Examination, 2021Документ3 страницыBEE-C413: B. Tech. Semester Iv Examination, 2021NamanОценок пока нет
- ECE102 hw2Документ5 страницECE102 hw2Yi LinОценок пока нет
- Taller Mathematica: Laura Otálora Ramírez Edward Rojas Mesa Cálculo IntegralДокумент8 страницTaller Mathematica: Laura Otálora Ramírez Edward Rojas Mesa Cálculo IntegralLaura OtáloraОценок пока нет
- Taller Mathematica: Laura Otálora Ramírez Edward Rojas Mesa Cálculo IntegralДокумент8 страницTaller Mathematica: Laura Otálora Ramírez Edward Rojas Mesa Cálculo IntegralLaura OtáloraОценок пока нет
- 2018 EEE243 Spring MID TERM SolutionДокумент6 страниц2018 EEE243 Spring MID TERM SolutionMusabbi FahimОценок пока нет
- ECEN 30024 - Inverse Laplace Transform2Документ9 страницECEN 30024 - Inverse Laplace Transform2Jon MaglangitОценок пока нет
- Lab 2 - Fourier SeriesДокумент6 страницLab 2 - Fourier SeriesEd ItrОценок пока нет
- 1621229991629Документ9 страниц1621229991629Bella cedricОценок пока нет
- ECE316H1 - 20201 - 641586556718ECE316 Problem Set Solutions Merged-20Документ79 страницECE316H1 - 20201 - 641586556718ECE316 Problem Set Solutions Merged-20Vama DaveОценок пока нет
- FLUID Dynamics Assignment 1Документ51 страницаFLUID Dynamics Assignment 1Aberamasundari SelvaОценок пока нет
- Solution To HW9Документ11 страницSolution To HW9Andreina BallunoОценок пока нет
- Educational Five-Bar Parallel RobotДокумент6 страницEducational Five-Bar Parallel RobotKoshala SavinduОценок пока нет
- EEE243/ECE243 Signals and Systems - Assignment : Please Show All The Integrations. Do Not Use Any CalculatorsДокумент5 страницEEE243/ECE243 Signals and Systems - Assignment : Please Show All The Integrations. Do Not Use Any CalculatorsRedwan AhmedОценок пока нет
- T4 QuasiconcavityIntegration QuestionДокумент2 страницыT4 QuasiconcavityIntegration QuestionBoeJoeMoe LoeОценок пока нет
- Model Predictive ControlДокумент15 страницModel Predictive ControlShlok MishraОценок пока нет
- Taller Cuatro Análisis de SistemasДокумент5 страницTaller Cuatro Análisis de SistemasCarlosОценок пока нет
- ECE 313 Spring24 Hw7Документ8 страницECE 313 Spring24 Hw7Duna areny molneОценок пока нет
- Control Systems and Engineering Lesson 3Документ46 страницControl Systems and Engineering Lesson 3EdrielleОценок пока нет
- RH Ver FinalДокумент21 страницаRH Ver Finalshek sonsonОценок пока нет
- Mathématiques Les Exercices Incontournables MPSIДокумент4 страницыMathématiques Les Exercices Incontournables MPSIRobeny DjiakouОценок пока нет
- Problem Set 4: Eren G Urer Economics of Taxation, SS 2020 June 18, 2020Документ8 страницProblem Set 4: Eren G Urer Economics of Taxation, SS 2020 June 18, 2020seanОценок пока нет
- Assignment1 SolutionДокумент16 страницAssignment1 Solutiondagani ranisamyukthaОценок пока нет
- Quantum Mechanics II - Homework 10Документ7 страницQuantum Mechanics II - Homework 10Ale GomezОценок пока нет
- Dwnload Full Digital Control System Analysis and Design 4th Edition Phillips Solutions Manual PDFДокумент36 страницDwnload Full Digital Control System Analysis and Design 4th Edition Phillips Solutions Manual PDFjacobwyisfox100% (14)
- Homework 1Документ2 страницыHomework 1Vu LeОценок пока нет
- MIT2 71S09 Usol7Документ16 страницMIT2 71S09 Usol7Stephanie Carolina Cely RodriguezОценок пока нет
- Ssce1793 Test3Документ1 страницаSsce1793 Test3Shahrul NizwanОценок пока нет
- Complex Math SolvedДокумент4 страницыComplex Math SolvedfawadОценок пока нет
- Lecture 2Документ23 страницыLecture 2ahmedelebyaryОценок пока нет
- Math-3 - Module-8 Integration by Trigonometric SubstitutionДокумент4 страницыMath-3 - Module-8 Integration by Trigonometric SubstitutionAne CalimagОценок пока нет
- 1.2.3 The Fundamental Theorem of Calculus: A F B F X F DX X FДокумент8 страниц1.2.3 The Fundamental Theorem of Calculus: A F B F X F DX X FEverything What U WantОценок пока нет
- m51 3.1 The Derivative (Trigo & Inverse Trigo)Документ16 страницm51 3.1 The Derivative (Trigo & Inverse Trigo)Kian Rodriguez SchoolОценок пока нет
- 110-1 Oneil 8thSICustomSolutionsEdAssignments Ch1Документ3 страницы110-1 Oneil 8thSICustomSolutionsEdAssignments Ch1歐米Оценок пока нет
- Mathematical ModelingДокумент18 страницMathematical Modelingmohamed orifОценок пока нет
- DCS 3Документ22 страницыDCS 3Anna BrookeОценок пока нет
- Lecture 1Документ4 страницыLecture 1Milind BhatiaОценок пока нет
- EEE 2411 - Lecture 3 - Block Diagram Representation of Control SystemsДокумент11 страницEEE 2411 - Lecture 3 - Block Diagram Representation of Control SystemsKelvin MusyokiОценок пока нет
- Ese562 Lect01Документ35 страницEse562 Lect01ashralph7Оценок пока нет
- Kepong Baru 2012 M1 (A)Документ8 страницKepong Baru 2012 M1 (A)STPMmathsОценок пока нет
- Integration TechniquesДокумент18 страницIntegration Techniquesஏம்மனுஎல்லெ செலேச்டினோОценок пока нет
- LAB-03 EE-311 Signal and Systems PDFДокумент12 страницLAB-03 EE-311 Signal and Systems PDFAwais AliОценок пока нет
- Class-IX - Code AДокумент3 страницыClass-IX - Code ASimon SajjadОценок пока нет
- Schap 22Документ16 страницSchap 22Aljebre MohmedОценок пока нет
- MA1102R - Calculus: Semester 2: AY2017/2018Документ15 страницMA1102R - Calculus: Semester 2: AY2017/2018Tan Jia JunОценок пока нет
- National University of Engineering: HOMEWORK No. 3: "Solution of 1st Parcial"Документ3 страницыNational University of Engineering: HOMEWORK No. 3: "Solution of 1st Parcial"Roberto BettОценок пока нет
- Worksheet Solution 9Документ4 страницыWorksheet Solution 9abdelrahmanhelal13Оценок пока нет
- Assignment 1Документ7 страницAssignment 1Umesh KumarОценок пока нет
- Elce 4003 - 3 - 2 PDFДокумент10 страницElce 4003 - 3 - 2 PDFomerОценок пока нет
- 03 Ball Mill EDMДокумент47 страниц03 Ball Mill EDMrecai100% (1)
- Metal Dusting in A Laboratory Environment - Alloying Addition EffectsДокумент15 страницMetal Dusting in A Laboratory Environment - Alloying Addition EffectsClaudia MmsОценок пока нет
- Chapter 6 Pumps and CompressorДокумент48 страницChapter 6 Pumps and CompressorIndiran SelvanОценок пока нет
- Cox On The Tensile Failure of 3D Woven CompositesДокумент12 страницCox On The Tensile Failure of 3D Woven CompositesPaul TurnerОценок пока нет
- Effect of Impurities On TheДокумент6 страницEffect of Impurities On TheBansal Shivansh100% (1)
- Hdpe Pipe Design PDFДокумент27 страницHdpe Pipe Design PDFAshley Dillon TothОценок пока нет
- FS 530-11 CI Single Convolution Air Actuator: Purchase Order Data Technical DataДокумент1 страницаFS 530-11 CI Single Convolution Air Actuator: Purchase Order Data Technical DataMichael AkhramovichОценок пока нет
- Press Work-Shearing - Bending - Forming - Deep DrawingДокумент132 страницыPress Work-Shearing - Bending - Forming - Deep DrawingAashiq Salu ThekkinedathОценок пока нет
- Gear Drives Vs Belt DrivesДокумент17 страницGear Drives Vs Belt DrivesAaryan MahakalkarОценок пока нет
- CAPE Physics Unit 1 Paper 2 2008Документ11 страницCAPE Physics Unit 1 Paper 2 2008GillОценок пока нет
- 316 316L Technical Information SheetДокумент5 страниц316 316L Technical Information SheetfejlongОценок пока нет
- Kidde Fire Systems HPCO2 Component Description: Stop (Directional) Valves, 1/2-Inch Thru 2-InchДокумент1 страницаKidde Fire Systems HPCO2 Component Description: Stop (Directional) Valves, 1/2-Inch Thru 2-InchElemsa InstalacionesОценок пока нет
- DMFR 20140229-1Документ6 страницDMFR 20140229-1aswad 0008Оценок пока нет
- Lec13 Problem SolutionДокумент30 страницLec13 Problem Solutionbadviolenceisbad100% (1)
- Optical Fiber Transmission MediaДокумент64 страницыOptical Fiber Transmission MediaMoneth Lozano100% (1)
- Pages From 0625 - s16 - QP - 42 - 01Документ2 страницыPages From 0625 - s16 - QP - 42 - 01lelon ongОценок пока нет
- Charny - Mathematical Models of Bioheat TransferДокумент137 страницCharny - Mathematical Models of Bioheat TransferMadalena PanОценок пока нет
- Convecc Ao Forc Ada Externa: Vicente Luiz ScalonДокумент18 страницConvecc Ao Forc Ada Externa: Vicente Luiz ScalonMaria VitóriaОценок пока нет
- Radphysics 1Документ5 страницRadphysics 1Angelica BastesОценок пока нет
- Unit One Material and Geometry of Cutting Tools 2015Документ46 страницUnit One Material and Geometry of Cutting Tools 2015elnat feyisa100% (1)
- Effectively Control Column PressureДокумент11 страницEffectively Control Column PressureRashesh Shah0% (1)
- Classification of Elements Notes 3Документ3 страницыClassification of Elements Notes 3Krishiv RajkumarОценок пока нет
- Lecture 3 - Curves in Space and Their TangentДокумент38 страницLecture 3 - Curves in Space and Their TangentNURUL YAHSIFAH SYQELLA BINTI YAHYA BK21110100Оценок пока нет
- Vapor-Liquid Equilibria of Nonideal Solutions: Harrison C. Carlson, and Allan P. ColburnДокумент10 страницVapor-Liquid Equilibria of Nonideal Solutions: Harrison C. Carlson, and Allan P. ColburnAlfonso Dominguez GonzalezОценок пока нет
- Heat Transfer Lectures 2 (Convection)Документ18 страницHeat Transfer Lectures 2 (Convection)Haider100% (6)
- Preparation and Textile Application of Poly Methyl Methacrylate Co Methacrylic Acid N Octadecane and N Eicosane MicrocapsulesДокумент13 страницPreparation and Textile Application of Poly Methyl Methacrylate Co Methacrylic Acid N Octadecane and N Eicosane MicrocapsulesFelipe Vázquez DávilaОценок пока нет
- Advanced Placement Chemistry TestДокумент15 страницAdvanced Placement Chemistry TestBobОценок пока нет
- Unit-5 Topic-6 Oscillations Answers (End-Of-Chapter & Examzone)Документ5 страницUnit-5 Topic-6 Oscillations Answers (End-Of-Chapter & Examzone)AvrinoxОценок пока нет